改进滑模变结构的永磁同步电机控制方法
2016-12-22 11:02李永腾王骁范良忠
电网与清洁能源 2016年8期
李永腾,王骁,范良忠
(1.国网浙江省电力公司宁海供电公司,浙江宁海 315600;2.浙江大学宁波理工学院,浙江宁波 315100)
改进滑模变结构的永磁同步电机控制方法
李永腾1,王骁1,范良忠2
(1.国网浙江省电力公司宁海供电公司,浙江宁海 315600;2.浙江大学宁波理工学院,浙江宁波 315100)
永磁受到多种因素影响,具有复杂变化特性。传统方法存在抗干扰能力弱、系统响应时间长,稳定性差等问题。为了获得更优的磁同步电机控制效果,提出了改进滑模变结构的永磁同步电机控制方法,在Matlab 2014的平台上与其他方法进行了仿真对比实验。结果表明,所提方法可以准确实现磁同步电机进行控制,当负载发突变时,能够在短时间内做出响应,抗负载扰动能力强,提高了系统动态性能。实验结果验证了所提方法对永磁同步电机控制的有效性和优越性。
永磁同步电动机;响应时间;滑模变结构;控制精度;矢量控制
永磁同步电动机(permanent magnet synchronous motor,PMSM)是一种主要重要的驱动设备,工作效率高,性能稳定,在工业、机器人、汽车等领域得到了成功应用[1]。永磁同步电动机的参数对其性能有直接影响,如何对永磁同步电动机的参数进行准确控制有重要的研究意义[2]。
针对永磁同步电动机的参数控制问题,业内人士投入了大量的时间进行了研究,尤其对转子位置、速度等研究最为广泛[3]。转子位置控制方法有:高频注入法和状态观测器估计法[4]。高频注入法通过通滤波器对位置信息进行处理,永磁同步电动机工作速度慢时,控制效果好[5],然而当永磁同步电动机的工作速度快时,滤波器分辨率下降,控制效果急剧变差,不能满足现代永磁同步电动机控制精度要求[6]。状态观测器估计法有:扩展卡尔曼滤波法、滑模变结构法等[7-9]。相对于高频注入法,状态观测器估计法更加简单,可以获得更优的永磁同步电动机控制效果。但它们也存在不足,如扩展卡尔曼滤波法的控制精度高,但执行时间长,响应速度慢,不能满足永磁同步电动机控制的实时性[10]。滑模变结构法具有易实现、鲁棒性强等优势,但对于低速的永磁同步电动机控制精度低[11],因此如何提高永磁同步电动机的控制性能仍然面临巨大的挑战[12-13]。
为了获得更理想的永磁同步电动机控制效果,针对当前方法的不足,本文提出了一种改进滑模变结构的永磁同步电机控制模型。在Matlab 2014平台的仿真测试结果表明,本文方法可以提高永磁同步电动机的控制精度,加快了响应速度,对外界干扰具有较强的鲁棒性,具有良好的动态性能。
1 PMSM的数学模型
永磁同步电动机是一种非线性、多变量耦合的控制系统,包括电机、转子定子等[14]。首先作假设:
1)永磁同步电动机有三相绕组,它们互相对称,之间相差120°,三相绕组间存在磁动势。
2)忽略永磁同步电动机的磁路饱和,三相绕组的自感和互感固定不变,并且不考虑铁心损耗。
3)忽略频率和温度变化对三相绕组的干扰。
在d-q旋转坐标系下,永磁同步电动机的定子电压和磁链方程分别定义如下:

式中:Ud,Uq为电压的dq轴分量;ωr为转子角的速度;ψd,ψq为磁链的dq的轴分量;ψf为永磁体的磁链;Ld,Lq为dq的线圈自感;id,iq为电流的dq的轴分量;p为微分算子;Rs为电阻。
综合式(1)和式(2)可以得

永磁同步电动机的工作状态方程为
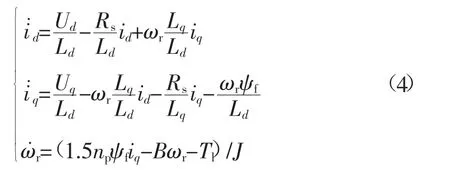
式中:J为转动惯量;B为阻尼系数;Tl为电磁和负载的转矩;np为转子极对数。
在永磁同步电动机的矢量控制中,通过CLARK和PARK进行坐标变换,得到永磁同步电动机的数学模型等效转换,便于更加方便实现矢量控制。
首先CLARK将a、b、c三相静止绕组变换为二相α、β静止绕组,然后PARK将二相α、β静止绕组变换到d、q旋转坐标系,具体为
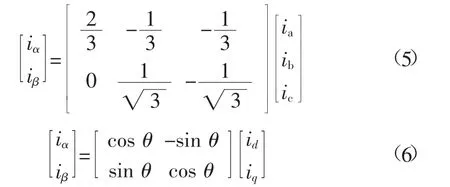
式中:ia,ib,ic为三相绕组的电流值,且ia+ib+ic=0;θ为子磁链的角度。
2 改进滑模变结构的PMSM控制
2.1 滑模观察器的构建
状态变量可以描述为
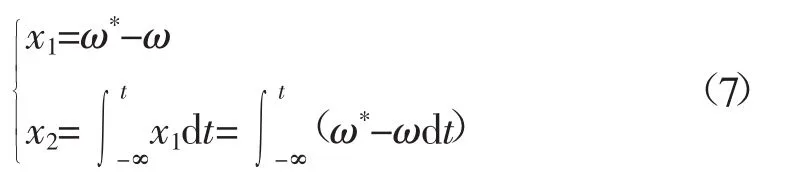
式中:ω*和ω分别为PMSM的期望和实际转速。
结合PSMSM的数学模型,则有:

在滑模变结构的状态量入常规滑模面(c)有

积分项初始值为

结合式(8),可以得到

采用指数趋近律设计PMSM的控制器,以获得更优的控制结果,即有

从而得到

综合上述可知:

2.2 滑模变结构的改进
针对传统滑模变结构方法的缺陷,本文引入饱和函数sat(s,δ)取代sgn(s),定义为
式(15)变换为

PMSM的运动方程为

式中:TLS为转矩的和。
PMSM控制系统的状态方程为

对系统构造状态观测器,可得:

PMSM控制系统的观测器误差为


3 仿真测试
3.1 仿真环境
为了分析基于改进滑模结构的PMSM控制性能,在Matlab 2014平台实现仿真实验,在相同仿真条件下,选择文献[15]的方法进行对比分析。采用PMSM参数为:Ld=Lq=7 mH,Rs=1.5 Ω,p=3,ψ=0.125 Wb,p= 3,模型结构如图1所示。
3.2 结果与分析
3.2.1 转速变化分析
当负载突然增加时,两种控制方法的PMSM电机转速变化曲线如图2所示。从图2可以看出,采用对比方法对PMSM进行控制时,负载突然变化,系统响应时间长,响应速度慢,系统的稳定性能差,而本文方法的响应时间相当短,转速变化十分平稳,没有出现太大的波动,提高了系统的响应效率,稳定性更优。
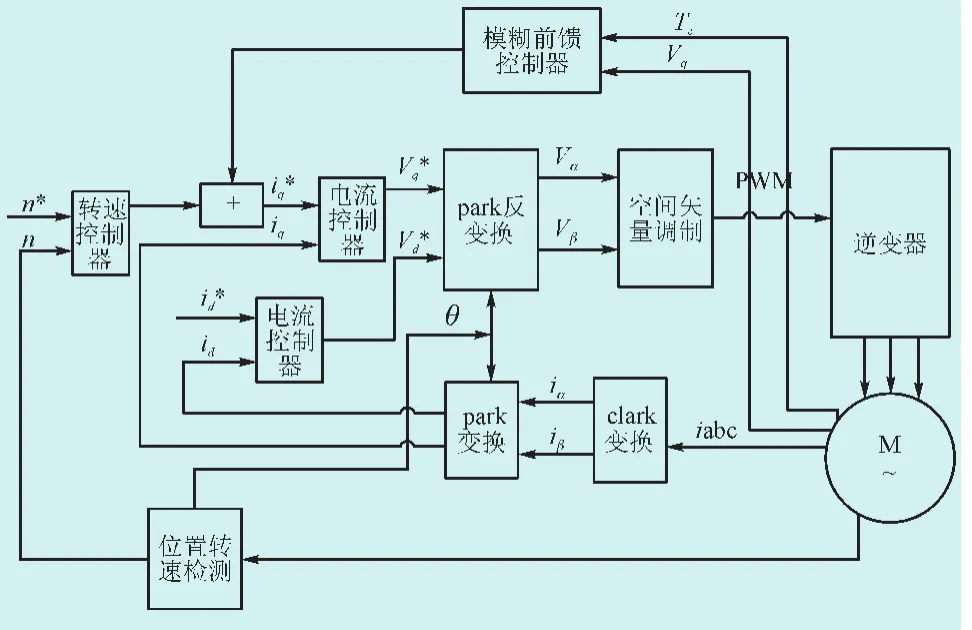
图1 PMSM的系统框图Fig.1 System diagram of PMSM

图2 转速的变化曲线Fig.2 Curve of speed change
3.2.2 电流变化分析
在不同仿真时间内,2种控制方法的PMSM电流变化曲线如图3所示。对图3的变化曲线进行分析可以发现,相对于对比方法,本文方法的电流变化范围更小,可以准确描述PMSM的电流变化趋势,控制系统的可靠性增加,对外界因素的干扰抵抗能力强,提高了PMSM控制系统的鲁棒性。

图3 电流变化曲线Fig.3 Curve of current change
3.2.3 转矩变化分析
在不同仿真时间内,2种控制方法的PMSM转矩变化曲线如图4所示。从图4可以看出,本文方法的转矩变化具有较强的随机性,消除了启动时的转矩脉动现象,而对比方法启动时的转矩脉动变化显著。结果表明本文方法可以对PMSM的负载进行准确预测,并且很快做出响应,实现了转矩变化状态的准确跟踪,使系统输出误差控制在有效范围内,具有较高的实际应用价值。

图4 转矩的变化曲线Fig.4 Curve of torque change
4 结语
针对当前PMSM控制误差大的难题,提出了改进滑模结构的PMSM控制方法。首先构建了PMSM的数学数学模型,然后采用滑模变结构控制器作为PMSM的驱动控制器,并针对传统滑模变结构方法不足进行了相应的改进。最后采用Matlab 2014仿真软件实现了测试实验。结果表明,本文方法可以准确实现磁同步电机进行控制,系统的响应速度,抗负载扰动能力强,系统的可靠性和稳定性好。
[1]LI Y,CHEN Y Q,PODLUBNY I.Stability of fractional order nonlinear dynamic systems;Lyapunov direct method and generalized Mittag-Leffler stability[J].Computers Mathematics with Applications,2010,59(5):1810-1821.
[2]张碧陶,皮佑国.基于模糊分数阶滑模控制的永磁同步电机控制[J].华南理工大学学报(自然科学版),2012,40(3):126-130.ZHANG Bitao,PI Youguo.Control of permanent magnet synchronous motor based on fuzzy fractional-order sliding mode control[J].Journal of South China University of Technology(Natural Science Edition),2012,40(3):126-130(in Chinese).
[3]王高林,张国强,贵献国,等.永磁同步电机无位置传感器混合控制策略[J].中国电机工程学报,2012,32(24):103-111 WANG Gaolin,ZHANG Guoqiang,GUI Xianguo,et al.Hybrid sensorless control strategy for permanent magnet synchronous motors[J].Proceedings of the CSEE,2012,32(24):103-111(in Chinese).
[4]王礼鹏,张化光,刘秀狮.低速PMSM无速度传感器调速系统积分滑模控制[J].电机与控制学报,2012,16(2):20-24.WANG Lipeng,ZHANG Huaguang,LIU Xiushi.Sensorless of integral sliding mode controlled PMSM at low speeds[J].Electric Machines and Control,2012,16(2): 20-24(in Chinese).
[5]史宏宇,冯勇,张袅娜.感应电动机全局高阶滑模观测器[J].吉林大学学报:工学版,2013,43(3):688-694.SHI Hongyu,FENG Yong,ZHANG Niaona.Global highorder sliding mode observer for induction motor[J].Journal of Jilin University(Engineering and Technology Edition),2013,43(3):688-694(in Chinese).
[6]张洪帅,王平,韩邦成,等.基于模糊滑模观测器的磁悬浮高速永磁同步电机转子位置检测方法[J].电工技术学报,2014,29(7):148-154.ZHANG Hongshuai,WANG Ping,HAN Bangcheng,et al.Rotor position measuring method for magnetic levitation high speed PMSM based on fuzzy sliding mode observer[J].Transactions of China Electrotechnical Society,2014,29(7):148-154(in Chinese).
[7]鲁文其,胡育文,杜栩杨.永磁同步电机新型滑模观测器无传感器矢量控制调速系统[J].中国电机工程学报,2010,30(33):78-83 LU Wenqi,HU Yuwen,DU Xuyang.Sensorless vector control using a novel sliding mode observer for PMSM speed control system[J].Proceedings of the CSEE,2010,30(33):78-83(in Chinese).
[8]刘伟,沈宏,高立刚,等.无刷双馈风力发电机直接转矩控制系统研究[J].电力系统保护与控制,2010,38(5):77-81.LIU Wei,SHEN Hong,GAO Ligang,et al.Studyon direct torque control of brushless doubly-fed machines used for wind power generation[J].Power System Protection and Control,2010,38(5):77-81(in Chinese).
[9]张晓光,赵克,孙力,等.永磁同步电机滑模变结构调速系统动态品质控制[J].中国电机工程学报,2011,31(15):47-52.ZHANG Xiaoguang,ZHAO Ke,SUN Li,et al.Sliding mode control of permanent magnet synchronous motor based on a novel exponential reaching law[J].Proceedings of the CSEE,2011,31(15):47-52(in Chinese).
[10]廖永衡,冯晓云,王珍.无差拍空间矢量调制直接转矩控制简化设计[J].电工技术学报,2011,26(6):95-101.LIAO Yongheng,FENG Xiaoyun,WANG Zhen.Simplified design of deadbeat direct torque control based on space vector modulation[J].Transactions of China Electrotechnical Society,2011,26(6):95-101(in Chinese).
[11]张晓光,孙力,赵克.基于负载转矩滑模观测的永磁同步电机滑模控制[J].中国电机工程学报,2012,32(3): 111-116.ZHANG Xiaoguang,SUN Li,ZHAO Ke.Sliding mode control of PMSM based on a novel load torque sliding mode observer[J].Proceedings of the CSEE,2012,32(3): 111-116(in Chinese).
[12]李建国,潘三博,张希.一种永磁直线同步电机滑模控制系统设计[J].微电机,2015,48(6):77-80.LI Jianguo,PAN Sanbo,ZHANG Xi.Sliding mode control system for permanent magnetic synchronous linear motor[J].Micrometrics,2015,48(6):77-80(in Chinese).
[13]续丹,雒焕强,房念兴,等.永磁同步电机分数阶与滑模变结构复合控制研究[J].西安交通大学学报,2012,46(5):132-136.XU Dan,LUO Huanqiang,FANG Nianxing,et al.Hybrid control of fractional order and sliding mode variable structure in permanent magnet synchronous motor[J].Journal of Xi’an Jiaotong University,2012,46(5):132-136(in Chinese).
[14]牛峰,李奎,王尧.基于占空比调制的永磁同步电机直接转矩控制[J].电工技术学报,2014,29(11):20-29.NIU Feng,LI Kui,WANG Yao.Model predictive direct torque control for permanent magnet synchronous machines based on duty ratio modulation[J].Transactions of China ElectrotechnicalSociety,2014,29(11):20-29(in Chinese).
[15]丁文,梁得亮,罗战强.两级滤波滑模观测器的永磁同步电机无位置传感器控制[J].电机与控制学报,2012,16(11):1-10.DING Wen,LIANG Deliang,LUO Zhanqiang.Position sensorless control of PMSM using sliding mode observer with two-stage filter[J].Electric Machines and Control,2012,16(11):1-10(in Chinese).
(编辑 冯露)
Control Method of PMSM Based on Improved Sliding Mode Variable Structure
LI Yongteng1,WANG Xiao1,FAN Liangzhong2
(1.Ningbo Power Supply Company,State Grid Zhejiang Electric Power Corporation,Ninghai 315600,Zhejiang,China;2.Ningbo Institute of Technology.Zhejiang University,Ningbo 315100,Zhejiang,China)
Permanent magnet synchronous motor(PMSM)has advantages of high efficiency,and energy saving,however,it is affected by many factors,and has the characteristics of complex changes.The traditional method has some problems,such as weak anti-interference ability,long system response time,poor stability and so on.In order to obtain the better control effect of PMSM,a new control method of PMSM by using improved sliding mode variable structure is proposed in this paper.The simulation experiment is carried out on Matlab 2014 and the results of the experiment are compared with those obtained by other methods.The results show that the proposed method can control the PMSM accurately,and the response time is short when load is in a mutation,and it has strong ability to resist the load disturbance and improve the dynamic performance of the system.The experimental results verify effectiveness and superiority of the proposed method in the control of permanent magnet synchronous motor.
permanent magnet synchronous motor;response time;sliding mode variable structure;control precision;vector control
国家自然科学基金资助项目(31302231);浙江省教育厅科研项目(Y201226043);宁波市自然科学基金资助项目(2012A610110).
Project Supported by National Natural Science Foundation of China(31302231);Research Project of Education Department of Zhejiang Province(Y201226043);Natural Science Foundation of Ningbo City(2012A610110).
1674-3814(2016)08-0057-05
TM315
A
2015-09-15。
李永腾(1974—),男,硕士,工程师,主要研究为电网建设运行技术及其管理;
王 骁(1978—),男,硕士,工程师,主要研究为电网信息通信技术;
范良忠(1980—),男,博士,副教授,主要研究领域为计算机应用。
猜你喜欢
防爆电机(2022年3期)2022-06-17
防爆电机(2021年2期)2021-06-09
防爆电机(2020年6期)2020-12-14
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
中国惯性技术学报(2019年6期)2019-03-04
北京航空航天大学学报(2017年6期)2017-11-23
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27