永磁电机无速度传感器的优化控制技术
2016-12-22 11:02:40郭华华张承维
电网与清洁能源 2016年8期
郭华华,张承维
(贵州理工学院电气工程学院,贵州贵阳 550001)
永磁电机无速度传感器的优化控制技术
郭华华,张承维
(贵州理工学院电气工程学院,贵州贵阳 550001)
永磁电机具有速度快、可靠性高等优点,在交流伺服系统中得到了广泛的应用,为了获得更优的永磁电机控制效果,提出一种新型的永磁电机无速度传感器优化控制技术。首先对永磁电机无速度传感器的工作原理进行分析,采用状态观测器测量转子的速度和位置,然后根据定子电流和参考电压估计反电动势,对轴向位移和旋转速度进行控制,最后采用仿真实验对其性能进行测试。结果表明,在各种条件下,所提控制技术均能够保证无速度传感器稳定运行,使得电机具有更优的工作性能。
永磁电机;无速度传感器;转矩控制;状态观测器;参考电压
永磁电机具有速度快、稳定性高、过载能力强等优点,在许多领域得到了成功的应用[1-3]。随着应用范围的不断拓宽,对永磁电机的性能要求越来越高,获得更加理想的永磁电机控制性能成为人们关注的焦点[4]。在永磁电机的工作过程中,由于磁引力的不稳定性,对位置进行反馈控制,以稳定轴向位移,学者们采用无传感器技术解决该问题[5]。
针对永磁电机的无速度传感器控制问题,相关学者和研究机构进行了深入探索。传统方法通过测量定子电流和电压得到无速度传感器感应电动势,从而实现转子的轴向位移和旋转速度的控制[6-8]。传统方法的感应电动势估计结果对噪音敏感,而且电机参数具有一定的非线性和时变性,控制精度受到较大的干扰[9-11]。为了克服传统方法的缺陷,有学者将反馈策略引入到控制技术中,通过状态观测器,如:龙伯格状态观测器、滑模变模型观测器、扩展卡尔曼滤波器来估计永磁电机的转速和转子位置。相对于其他观测器,龙伯格观测器的非线性系统估计性能更优,使用更加广泛[12]。
1 永磁电机的数学模型
永磁电机是一种非线性、多变量耦合的控制系统,数学模型由一组与电机、转子定子位置等的微分方程组成,下面具体描述永磁电机的数学模型。
1)电压方程为
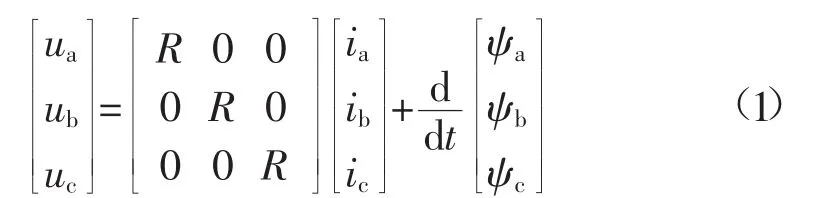
式中:ua,ub,uc分别为定子三相绕组电压值;ia,ib,ic分别为定子三相绕组的电流值;ψa,ψb,ψc分别为定子的磁链;R为定子绕组的电阻值。
2)磁链方程为
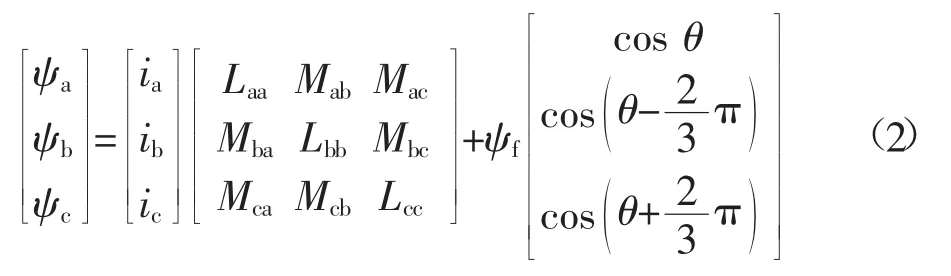
式中:Laa,Lbb,Lcc为定子三相绕组的自感值;θ为转子磁链角度;Mab=Mba,Mbc=Mcb,Mac=Mca为两相绕组;ψf为转子磁链。
3)永磁电机的电磁转矩表示为

式中:Te为电磁转矩;pn为电机的极对数。
4)永磁同步电动机的运动方程为

式中:J为电机转动惯量;ωrm为转子角速度;Te为永磁电机输出转矩;TL为永磁电机负载转矩。
2 永磁电机无速度传感器的优化控制策略
全阶龙伯格状态观测器可以对电机速度和转子位置进行估计,然后将测量值和估计电流间的差值作为采样误差,乘以观测器增益,控制器的输出为校正因子,将其添加到数学模型中,每个控制循环重复操作直到2个电流相等。
将感应电动势作为扰动和状态向量,龙伯格观测器状态方程为
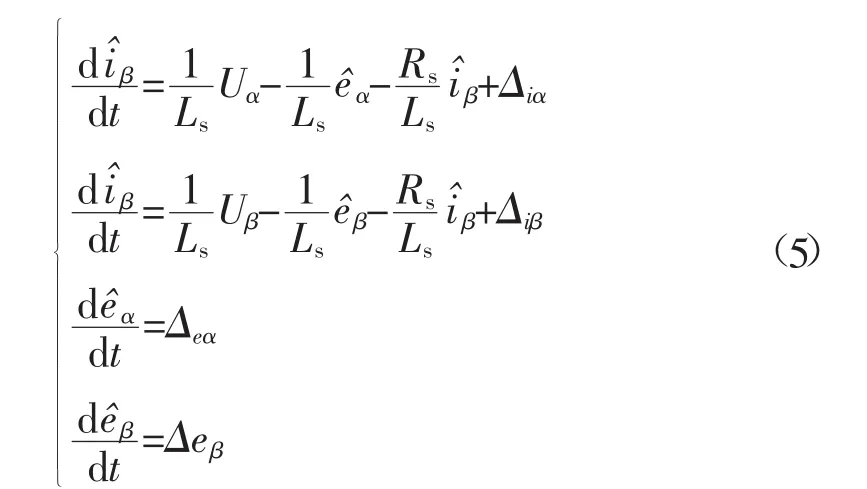
式中:Uα,Uβ,iα,iβ和eα,eβ分别为α-β坐标系中的定子电压、电流和感应电动势,^表示估计值。
广延状态计算式为
式中:A,B和C为状态空间模型参数;K为增益矩阵。对于无轴承永磁轴向气隙电机,增益矩阵为

由于α,β坐标系中方程式的对称性,可以得到:

增益矩阵的选择必须满足系统收敛的必要条件。稳定状态下如果观测误差为0,称观测器是渐进稳定的,准确值和估计状态变量之差为

误差的动态方程为

若矩阵(A-KC)全部特征值在左半平面,且t→∞,状态误差δ→0,龙伯格观测器渐进稳定。选择观测器极点收敛的速度将是系统极点的10倍,对噪声进行极点配置可以得到矩阵增益。
考虑大增益和小增益对控制系统稳定性影响,本文通过一定的控制技术,使得自适应增益与电机的频率和速度成正比,从而实现系统的控制。

式中:ωe为转子角速度
3 实验结果与分析
3.1 实验环境
为了对本文永磁电机无速度传感器控制性能进行测试,采用Matlab/Simulink进行仿真测试,采用永磁电机的结构如图1所示。
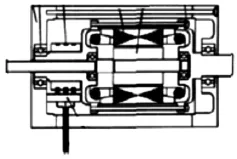
图1 永磁电机的结构Fig.1 The system structure of permanent magnet motor
3.2 结果与分析
在永磁电机的无速度传感器电阻为3 Ω条件下,对电压值进行测量,计算静态相自感应系数到电感的值,当定子转速为500 r/min、低通滤波器截止频率为101 Hz时,采用观测器对反电动势进行估计,结果变化曲线如图2所示。从图2可以清楚看出,反电动势的实际测量值与估计变化趋势十分相似,可以准确拟合永磁电机的无速度传感器反电动势的变化特点,初步验证了本文方法的有效性。
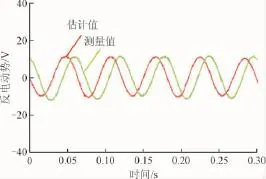
图2 反电动势的变化曲线Fig.2 Variation of the back EMF
当转子速度为0,测试转子轴向位移的变化规律,具体结果如图3所示,从图3可以发现,当位移误差为0.25 mm,轴向位置控制器在0.25 s时进入工作状态,此时最大误差为0.15 mm,从转子轴向位移的整个变化过程可以发现,转子轴向位移长期处于一种稳态工作状态,可以满足永磁电机无速度传感器实际应用要求。
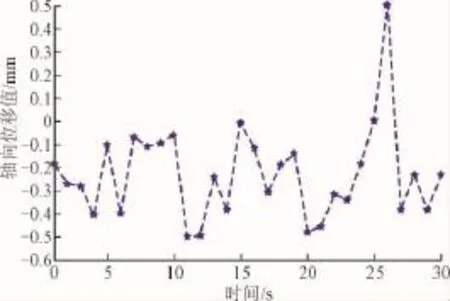
图3 轴向位移值的变化结果Fig.3 The variation of the axial displacement
对永磁电机无速度传感器的工作速度进行测试,结果如图4所示。从图4可以看出,工作速度的实际测量值与估计值很接近,能够精确描述永磁电机的无速度传感器速度变化趋势,当速度发生突变时,本文方法同样可以实现永磁电机无速度传感器准确估计。
在稳定工作下,转子的悬浮速度误差变化曲线如图5所示。从图5可以发现,转子的悬浮速度最大误差为5 r/min,工作速度十分稳定,变化幅值非常小,完全在控制范围内,结果证明了本文方法对永磁电机的无速度传感器速度闭环控制的有效性。
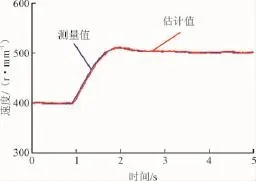
图4 速度的测量值与估计值Fig.4 Measured values and estimated values of velocity
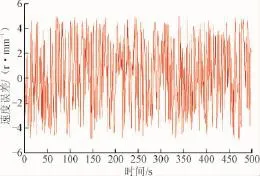
图5 稳态速度的误差变化趋势Fig.5 Error variation trend of steady state velocity
轴向位置控制器和观测控制器会导致转子旋转速度估计结果的变化,具体变化曲线如图6所示,从图6可以知道,转子的旋转速度测量值和估计值之间的偏差很小,最大差值没有超过10%,精度达到90%左右,完全满足实际应用的85%要求,这表明本文方法对轴向位移闭环具有良好的控制性能。

图6 转子旋转速度的测量值与估计值Fig.6 Measured values and estimated values of rotor rotation speed
4 结语
为了获得更优的永磁电机控制效果,提出了一种新型的永磁电机无速度传感器控制技术,实验结果证实了本文方法对电机速度和轴向位移闭环控制具有良好的性能,可以分别对轴向位移和旋转速度进行实时控制,可以在中速、高速以及稳态下取得较好的控制效果,适应于对低速或者暂停操作没有要求的应用场合。
[1]GILBERT FOO,AHMAN M F.Sensorless sliding-mode MTPA control of an IPM synchronous motor drive using a sliding-mode observer and HF signal injection[J].IEEE Transactions on Industrial Electronics,2010,57(4):1270-1278.
[2]董淑惠,王毅.永磁直驱风力发电机组两种主要功率控制策略的对比研究[J].电网与清洁能源,2014,30(4): 70-80.DONG Shuhui,WANG Yi.Comparative analysis on two main power control strategies of PMSG-Based wind turbines[J].Power System and Clean Energy,2014,30(4): 70-80(in Chinese).
[3]INOUE Y,MORIMOTO S,SANADA M.Control method suitable for direct-torque-control-based motor drive system voltage and current limitations[J].IEEE Transaetions on Industry Applications,2012,48(3):970-976.
[4]刘颖,周波,李帅,等.转子磁钢表贴式永磁电机转子初始位置检测[J].中国电机工程学报,2011,31(18):48-54.LIU Ying,ZHOU Bo,LI Shuai,et al.Initial rotor position detection of surface mounted permanent magnet synchronous motor[J].Proceedings of the CSEE,2011,31(18):48-54(in Chinese).
[5]万健如,宫成,刘偉,等.基于MTPA的永磁电机滑模变结构直接转矩控制[J].电机与控制学报,2012,16(3): 30-35.WANG Jianru,GONG Cheng,LIU Wei,et al.Sliding mode variable structure control of permanent magnet synchronous machine based on MTPA[J].Electric Machines and Control,2012,16(3):30-35(in Chinese).
[6]林斌,孙丹,贺益康.永磁电机直接转矩控制高速运行范围拓宽[J].电机与控制学报,2014,18(9):9-16.LIN Bin,SUN Dan,HE Yikang.High-peed operation range extension for direct torque controlled permanent magnetsynchronousmotors[J].Electric Machinesand Control,2014,18(9):9-16(in Chinese).
[7]王高林,张国强,贵献国,等.永磁电机无位置传感器混合控制策略[J].中国电机工程学,2012,32(24):103-109.WANG Gaolin,ZHANG Guoqiang,GUI Xianguo,et al.Hybrid sensorless control strategy for permanent magnet synchronous motors[J].Proceedings of the CSEE,2012,32(24):103-109(in Chinese).
[8]王庆龙,张兴,张崇巍.永磁电机矢量控制双滑模模型参考自适应系统转速辨识[J].中国电机工程学,2012,32(24):103-109.WANG Qinglong,ZHANG Xing,ZHANG Chongwei.Double sliding-mode model reference adaptive system speed identification for vector control of permanent magnet synchronous motors[J].Proceedings of the CSEE,2012,32(24):103-109(in Chinese).
[9]张碧陶,皮佑国.基于分数阶滑模控制技术的永磁电机控制[J].控制理论与应用,2012,29(9):1193-1197.ZHANG Bitao,PI Youguo.Fractional order sliding-mode control for permanent magnet synchronous motor[J].Control Theory&Applications,2012,29(9):1193-1197(in Chinese).
[10]杨淑英,占琦,张兴,等.基于扩展磁链观测的永磁电机转矩闭环矢量控制[J].电力系统自动化,2014,38(6):80-85.YANG Shuying,ZHAN Qi,ZHANG Xing,et al.Torque closed-loop vector control based on extended flux linkage observer of permanent magnet synchronous motor[J].Automation of Electric Power Systems,2014,38(6):80-85(in Chinese).
[11]黄家才,施昕昕,李宏胜,等.永磁电机调速系统的分数阶积分滑模控制[J].吉林大学学报(工学版),2012,32(24):103-109.HUANG Jiacai,SHI Xinxin,LI Hongsheng,et al.Speed control of PMSM using fractural order integral sliding mode controller[J].Journal of Jilin University(Engineering and Technology Edition),2012,32(24):103-109(in Chinese).
[12]杨永超,向如意,钟建伟.并网型永磁直驱风电系统非线性模型扰动稳定域分析J].电网与清洁能源,2015,32(4):112-118.YANG Yongchao,XIANG Ruyi,ZHONG Jianwei.Driven permanent magnet wind power system for disturbance stability region based on nonlinear model[J].Power System and Clean Energy,2016,32(4):112-118(in Chinese).
(编辑 冯露)
Optimal Control Technology of Speed Sensorless for PMSM
GUO Huahua,ZHANG Chengwei
(College of Electrical Engineering,Guizhou Institute of Technology,Guiyang 550001,Guizhou,China)
The permanent magnet motor has advantages of high speed and high reliability which has been widely used in the AC servo system.In order to obtain a better control effect of the permanent magnet motor,a novel control technology of speed sensorless for the permanent magnet motor is presented in this paper.Firstly,the working principle of the permanent magnet motor without speed sensor is analyzed,and speed and position of rotor are measured by the state observer.Secondly the back EMF is estimated according to the stator current and reference voltage to control the axial displacement and rotation speed.Finally a simulation experiment is used to test the performance.The results show that the proposed can ensure stable operation of the speed sensor under all kinds of conditions,so the motor has better performance.
magnetic motor;speed sensorless;torque control;state observer;reference voltage
国家自然科学基金资助项目(61563010);贵州省科学技术基金项目(J20142080).
Project Supported by the National Natural Science Foundation of China(J20142080);the Science and Technology Foundation of Guizhou(J20142080).
1674-3814(2016)08-0013-04
TM351
A
2016-05-16。
郭华华(1979—),女,硕士,讲师,主要研究方向为电子科学技术;
张承维(1979—),女,博士,副教授,主要研究方向为自动化控制。
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
建材发展导向(2019年13期)2019-08-24 06:37:40
电子制作(2019年7期)2019-04-25 13:16:50
照明工程学报(2016年3期)2016-06-01 12:17:56
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
电测与仪表(2014年1期)2014-04-04 12:00:32
电测与仪表(2014年11期)2014-04-04 09:21:36