基于Simulink的风电机组模糊变桨距控制仿真研究
2016-12-21 06:36:08陈功贵黄山外刘俊超
实验室研究与探索 2016年4期
陈功贵, 黄山外, 刘俊超, 郭 飞
(重庆邮电大学 自动化学院,复杂系统分析与控制研究中心,重庆 400065)
基于Simulink的风电机组模糊变桨距控制仿真研究
陈功贵, 黄山外, 刘俊超, 郭 飞
(重庆邮电大学 自动化学院,复杂系统分析与控制研究中心,重庆 400065)

针对风力发电系统复杂非线性的特点,传统PID控制很难满足控制系统高精度的要求。在传统PID控制的基础上,运用模糊理论建立了完整的风电机组变桨距模型,以实现对控制系统的实时控制。仿真结果表明,模糊控制能使系统获得较好的动态特性。利用Simulink进行仿真实验,不仅能使学生有效理解变桨距控制系统理论知识,还可以提高学生的实验操作能力,从而掌握控制系统的静态和动态过程,这种理论与实践相结合的方法能够有效地提高教学质量。
风力发电机; 变桨距控制; 仿真; 模糊控制
0 引 言
风能是一种分布广泛的绿色可再生能源,风力发电机组能够将风能转换成供人们使用的电能。风力发电系统是一个多变量、非线性的控制系统,这给风电机组的变桨距控制带来了很大的困扰[1]。因此,对风力发电机组PID参数进行优化来保证变桨距控制系统的稳定性,进而得到安全、优质的电能是是风力发电机组研究的关键问题[2]。而风电机组变桨距控制系统的性能与变桨距控制器的控制规律及参数设置密切相关,因此,找到合适的控制器参数成为了变桨距控制的另一个难题。
维持电力系统安全稳定运行是非常重要的,对于这样一个复杂非线性的控制系统,传统的PID控制[3-4]很难达到较好的控制效果,而采用模糊PID控制[5-7],通过建立模糊规则对PID控制参数进行实时在线的调整,这样能够使系统获得良好的动态性能进而保证电力系统的稳定性[8-10]。本文通过建立Simulink仿真模快、设置模块参数,在给定风速输入条件下,分别采用PID控制器[11]和模糊PID控制器进行仿真实验,实验结果表明,模糊控制能使系统获得更好的动态特性。
将Simulink仿真[12-13]引入到风电机组变桨距控制系统实验教学中,学生可以把所学的理论知识运用到实际仿真中,并对变桨距系统的结构和PID控制原理有深刻的认识,此外,Simulink中直观详细的仿真图和实验数据,还能培养学生对实验数据的处理和分析能力,这种理论与实践相结合的方法能够有效地提高教学质量[14-15]。
1 风电机组的数学模型
风力发电系统是一个综合空气动力学特性,机械特性及电气特性为一体的复杂非线性系统,构建风电机组的数学模型对研究系统的动态特性及其控制规律具有重要意义。在本文中,我们把风电机组模型分为风轮模型、传动机构模型和异步发电机模型。
1.1 风轮模型
风轮的作用是将叶片接收到的风能转化为机械能,在输入风速v(m/s)的作用下,风轮的吸收功率和气动转矩为:
(1)
式中:P是风轮的吸收功率;Tr是风轮的气动转矩;Cp是风能利用系数;CT是气动转矩系数;λ是叶尖速比;β是桨距角;ρ是空气密度;R是风轮半径。在实际应用中,风能利用系数是由叶尖速比和桨距角共同决定的二元函数:
(2)
1.2 传动机构模型
本文采用了非直驱式异步发电机组,忽略系统阻力和异步发电机的机械阻力,靠近风轮的低速轴和靠近发电机的高速轴的动态方程如下:
(3)
式中:Jr为风轮转动惯量;Jg为发电机转动惯量;ωr为发风轮转速;n为齿轮箱增速比;Tr为风轮输出转矩;Tm为发电机轴机械转矩;Te为发电机电磁转矩。由式(3)可得传动机构方程为:
(4)
1.3 发电机模型
本文以异步发电机为研究对象,不考虑导线、铁芯的集肤效应及磁滞、涡流等因素的影响,定子和转子绕组在气隙中都产生三相对称且正弦分布的磁通,异步发电机模型可表示为:
(5)
式中:p为发电机极对数;m为相数;U1为发电机输出电压;C1为修正系数;ω0为电机同步转速;ωg为发电机转子转速;r1、x1分别是定子绕组等效电阻和电抗;r2、x2分别是转子绕组等效电阻和电抗。
2 变桨距PID控制系统仿真模型
在Simulink环境中建立风电机组变桨距控制系统仿真模型,如图1所示。变桨距控制系统包含有叶尖速比模块、PID控制器模块、风能利用系数模块、风能气动转矩模块、传动系统模块、发电机模块。
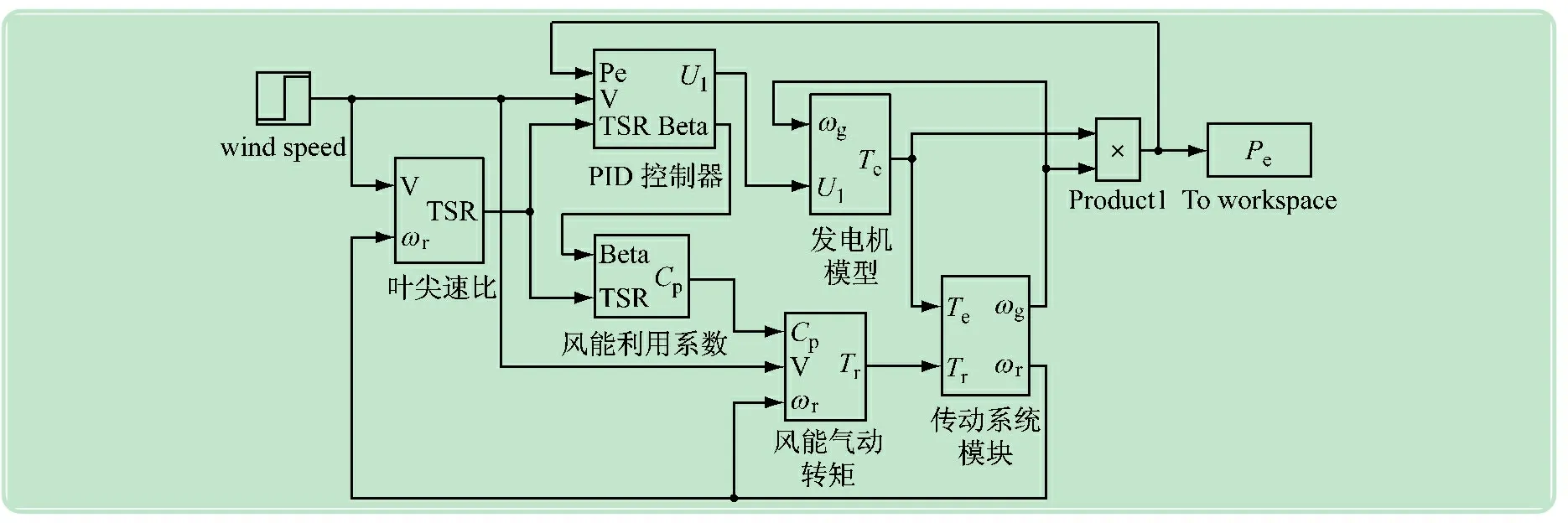
图1 风电机组变桨距控制系统仿真模型
在给定风速下,利用发电机额定功率与系统输出功率的误差信号对桨距角进行PID控制。分别改变不同的PID参数数值,来观察系统输出随之而发生的变化情况。变桨距控制系统PID控制器如图2所示。
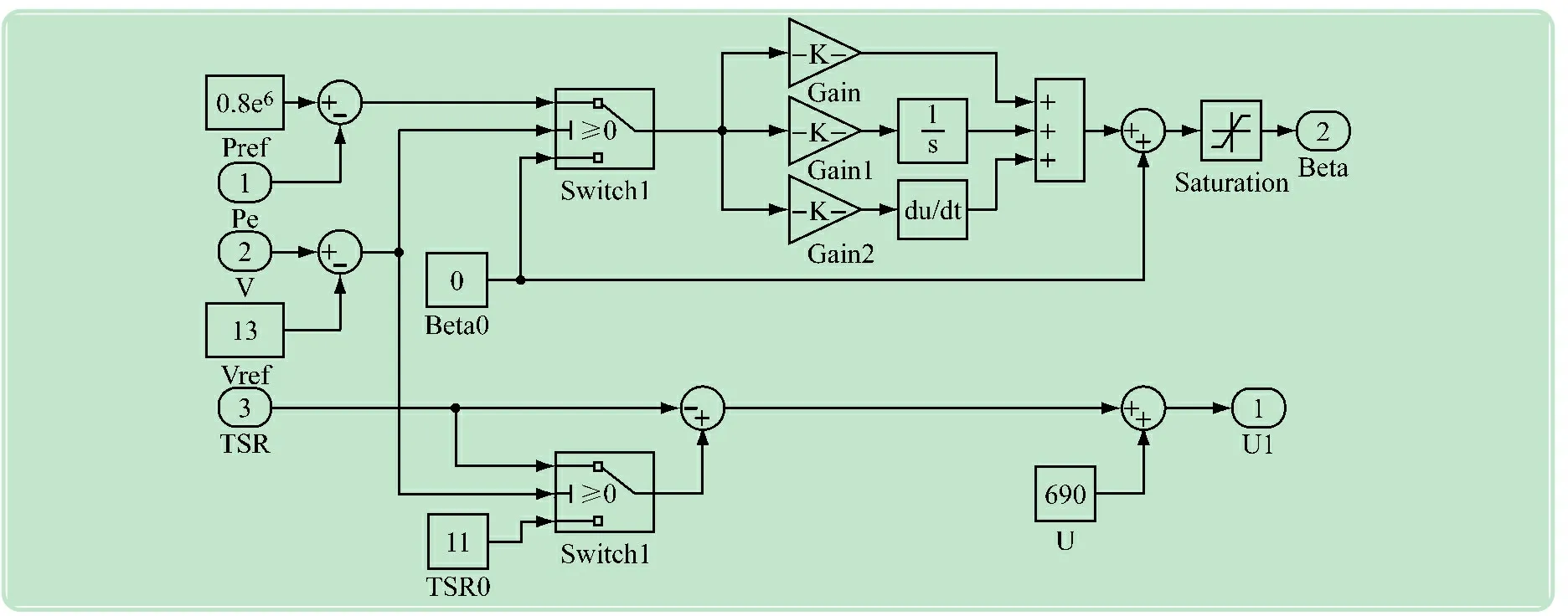
图2 变桨距控制系统PID控制器
3 模糊PID控制器的设计
3.1 模糊PID控制的结构
模糊PID控制器是在传统PID控制器的基础上,使用模糊规则、模糊逻辑推理方法来调整PID控制算法中的参数。其中,由模糊逻辑推理得到的结果并不直接作为系统的输出,而是继续整定PID参数,使系统的具有更好的动态性能。其Simulink仿真模块如图3所示。
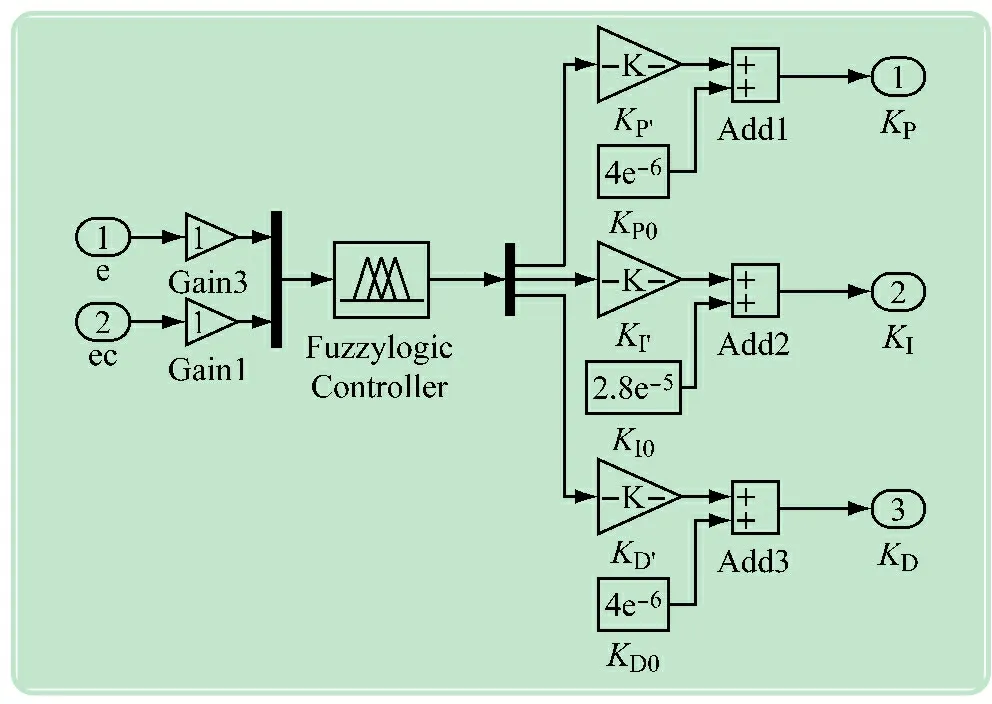
图3 模糊PID控制器
3.2 模糊控制规则的设计
模糊控制规则的设计步骤如下:
(6)
其中,KP0,KI0,KD0为模糊自适应PID控制器的初值,并
设置为:KP0=4e-6,KI0=2.8e-5,KD0=1e-6。

表的模糊控制规则表
4 仿真实验及结果分析
风力发电机变桨距控制系统动态特性在工程应用中是必须进行的试验之一,这关系到风电机组运行安全及电能质量。仿真实验所用的风力机组参数如表4所示,异步发电机参数如表5所示,相关参数来源于德国Nordex公司S70/1 500 kW风力机组。

表的模糊控制规则表

表的模糊控制规则表
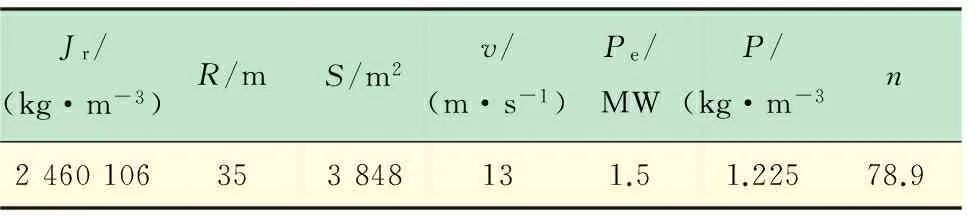
表4 风力机相关参数

表5 异步发电机相关参数
在Matlab/Simulink仿真环境中,根据建立的风电机组数学模型搭建仿真模块,在给定风速工况下,分别采用PID控制器和模糊PID控制器,并观察系统动态响应过程,并根据实验数据及仿真图对系统作出具体分析。其中,风速初始值设置为15 m/s,终止值设置为20 m/s,PID参数采用传统PID整定得到的最好结果,取KP=1.137 5e-5,KI=2.013 3e-5,KD=0.120 9e-5。在Simulink环境下选择ode3算法进行仿真,分别得到输出功率、PID参数、桨距角、叶尖速比、风能利用系数、发电机转速的仿真结果如图4~9所示。
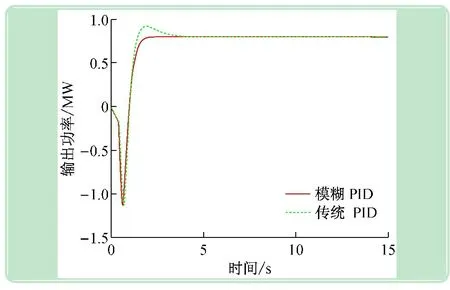
图4 给定风速下的输出功率
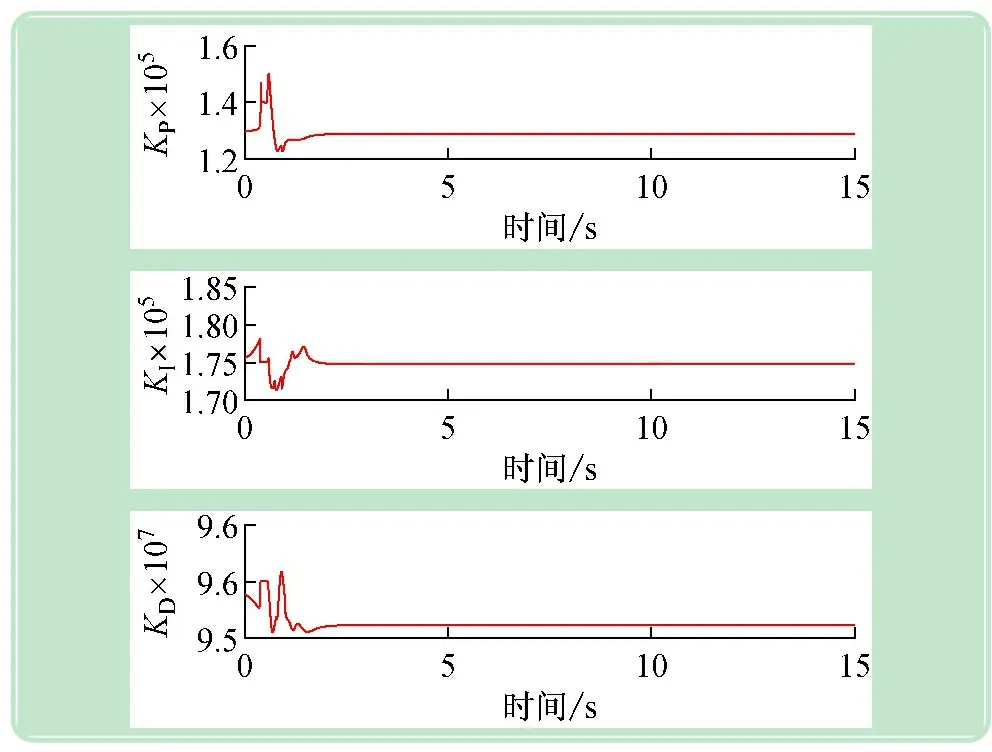
图5 给定风速下PID参数自适应过程
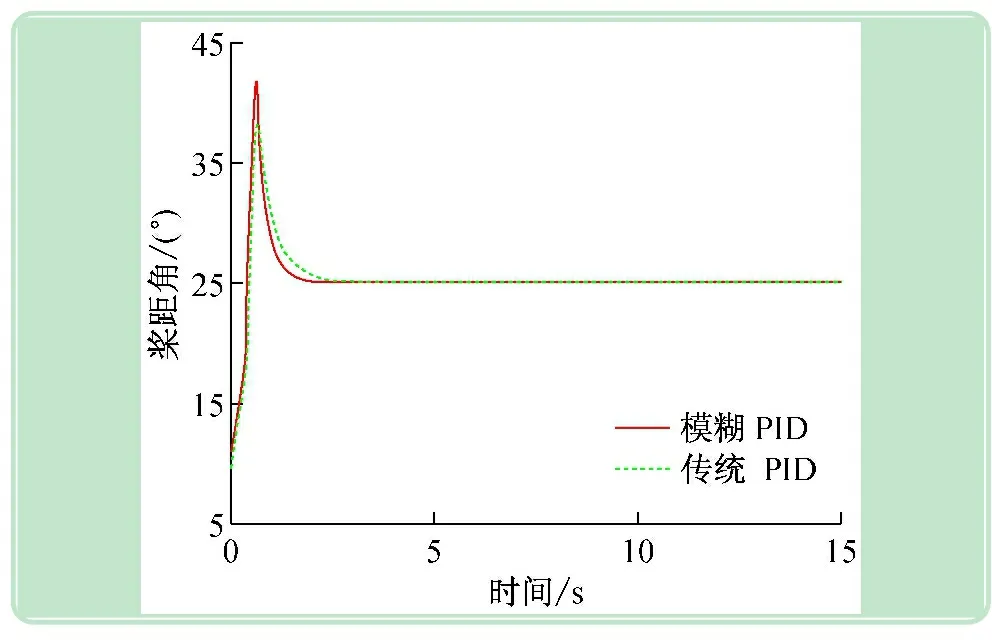
图6 桨距角
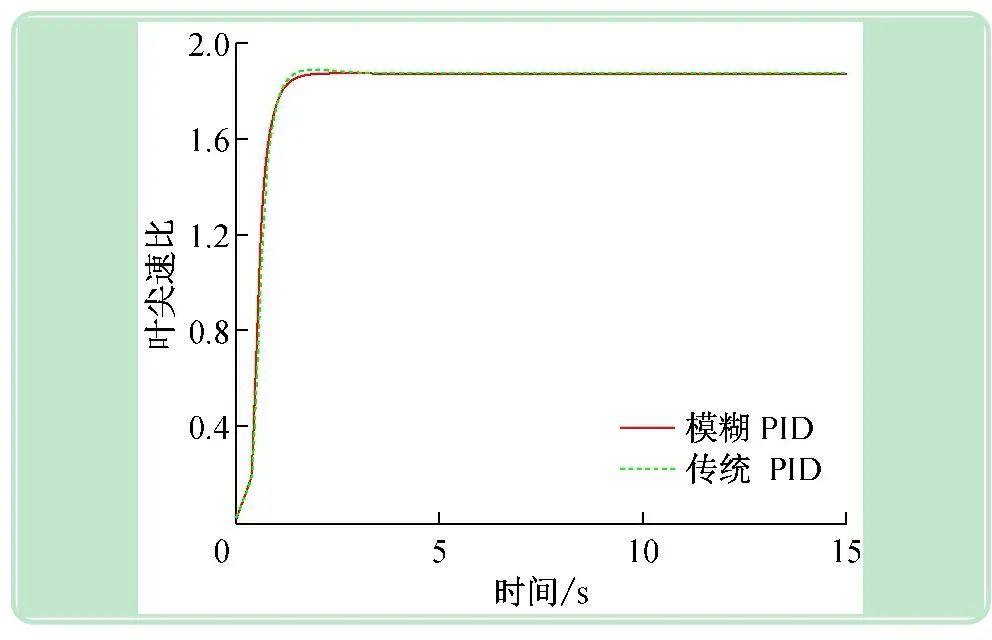
图7 叶尖速比
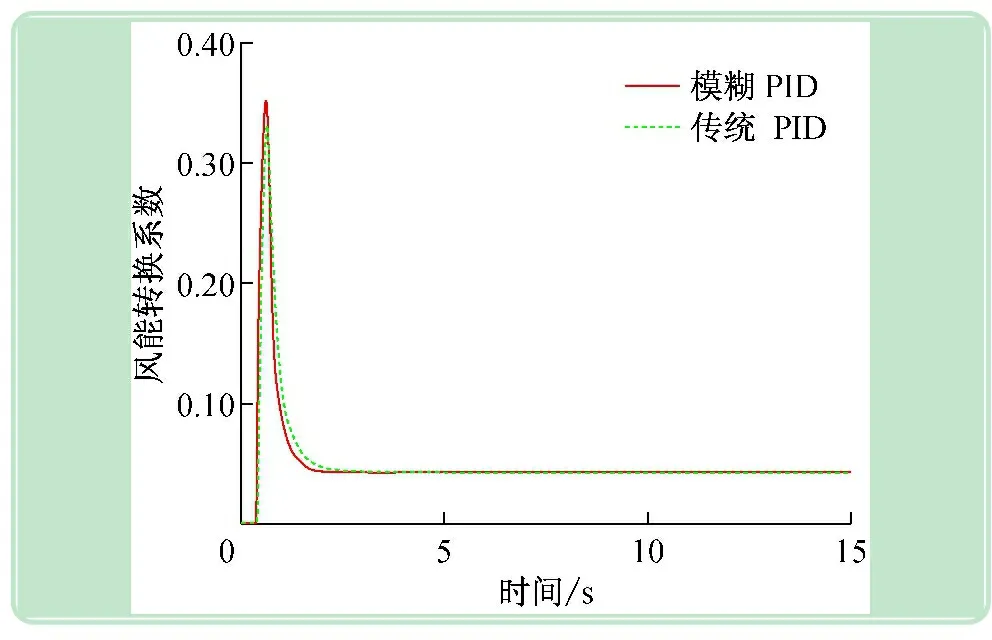
图8 风能转换系数
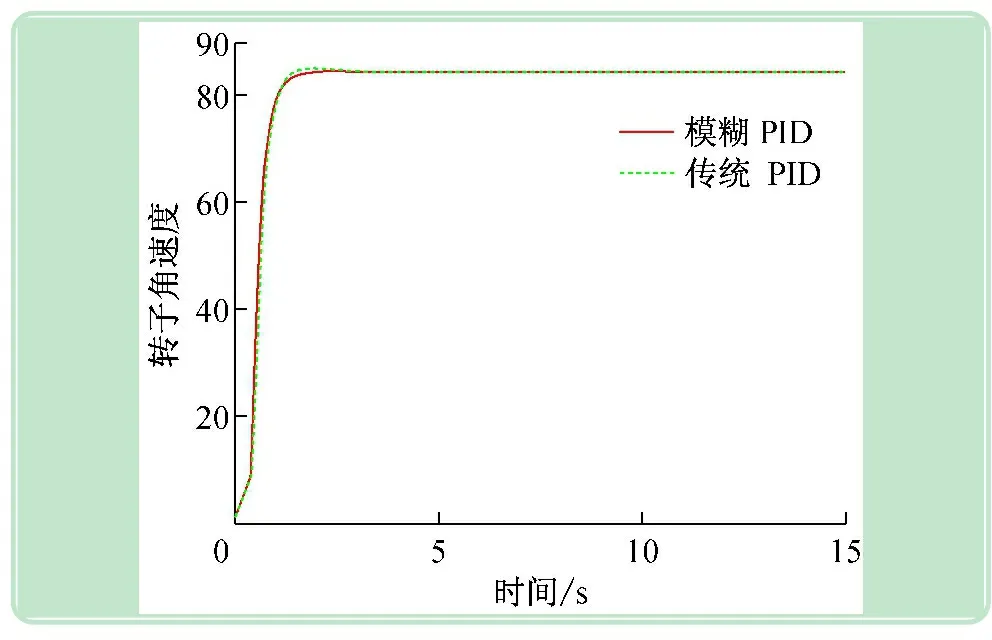
图9 转子角速度
从图4中可以看出两种控制都能使输出功率稳定在额定功率800 kW附近,两者都有很小的稳态误差,但传统PID控制存在较大的超调量和较长的调节时间,而模糊PID控制有效地减小了响应过程中的超调量和调节时间,输出曲线更为平滑。所以风力发电机的变桨距控制采用模糊PID控制的动态响应性能更好。图5给出了模糊控制的PID参数自适应过程,PID参数的实时更新有效的改善了系统的动态性能。图6~9也显示模糊PID控制比传统的PID控制效果更好,更有利于风电机组变桨距控制。
5 结 语
风力发电系统是一个综合了多个学科的复杂系统,本文针对典型的具有大惯性、大滞后、非线性等特性的风力发电机变桨距控制系统,建立了相应的数学模型,并在Matlab/Simulink环境下搭建了变桨距控制系统仿真模块。在给定风速输入条件下,运用模糊PID控制对系统进行仿真实验,并将其与传统PID控制仿真结果进行比较。实验结果表明,模糊PID控制是一种更有效的风力发电机组变桨距控制方法,相比于传统PID控制,模糊控制的运用能使系统拥有更快的响应速度,更小的超调量,更好的稳定性。
我们将Simulink仿真引入到实验研究与教学中,通过理论知识和实践仿真相结合,既能有效地激发学生的学习兴趣,又能培养学生解决问题的能力。Simulink实验结果中丰富的实验数据和仿真图形,使学生对理解系统的动态过程有了更直观的理解,并对PID参数变化引起系统性能的改变有了更深刻的认识。
[1] 宋新甫, 梁 波. 基于模糊自适应PID的风力发电系统变桨距控制[J]. 电力系统保护与控制, 2009,37(16):50-53, 58.
[2] Chen G, Liu L, Song P,etal. Chaotic improved PSO-based multi-objective optimization for minimization of power losses and L index in power systems[J]. Energy Conversion and Management, 2014(86):548-560.
[3] 白 金, 韩俊伟. 基于MATLAB/Simulink环境下的PID参数整定[J]. 哈尔滨商业大学学报, 2007,23(6):673-676.
[4] 王 钊, 陈 真. 基于Simulink的PID控制器设计[J]. 实验技术与管理, 2007,24(5):70-72.
[5] 阳 睿, 李英姿, 张立文, 等. 模糊PID控制的原子力显微镜仿真平台[J]. 实验室研究与探索, 2014,33(1):9-12, 153.
[6] 郭 鹏. 模糊前馈与模糊PID结合的风力发电机组变桨距控制[J]. 中国电机工程学报, 2010,30(8):123-128.
[7] 孙晓明, 马 青, 曹 虎, 等. 自适应模糊PID控制在PLC变频调速同步测试中的应用[J]. 实验室研究与探索, 2014,33(6):16-18, 64.
[8] 费红姿, 范立云, 费景洲, 等. 基于虚拟仪器的直流电机模糊PID控制实验研究[J]. 实验技术与管理, 2015,32(3):81-84, 96.
[9] 王建伟, 段爱霞, 侯树文. 基于遗传算法的水轮发电机组模糊PID控制研究[J]. 水力发电, 2007,33(7):60-62.
[10] 俞海珍, 史旭华, 徐建瑜. 模糊自适应PID控制在过程控制实验系统上的应用[J]. 实验技术与管理, 2010,27(1):69-72.
[11] 刘金琨. 先进PID控制MATLAB仿真[M]. 北京: 电子工业出版社, 2011.
[12] 尚 丽, 崔 鸣, 杰 陈. Matlab/Simulink仿真技术在双闭环直流调速实验教学中的应用[J]. 实验室研究与探索, 2011,30(1):181-185.
[13] 郭训华, 邵世煌. Simulink建模与仿真系统设计方法及应用[J]. 计算机工程, 2005,31(22):127-129, 145.
[14] 叶杭冶, 潘东浩. 风电机组变速与变桨距控制过程中的动力学问题研究[J]. 太阳能学报, 2007,28(12):1321-1328.
[15] 张 佳. 光电跟踪系统的模糊自适应PID控制实验[J]. 实验技术与管理, 2014,31(8):59-63, 86.
[16] 左 锋, 石红瑞, 刘洪玮. 模糊控制在空气球实验系统中的应用[J]. 实验室研究与探索, 2010,29(5):36-38, 42.
·名人名言·
科学实验是科学理论的源泉,是自然科学的根本,也是工程技术的基础。
——张文裕
Research on Fuzzy Variable Pitch Control System for Wind Turbines Based on Simulink
CHENGong-gui,HUANGShan-wai,LIUJun-chao,GUOFei
(Research Center on Complex Power System Analysis and Control, College of Automation,Chongqing University of Posts and Telecommunications, Chongqing 400065, China)
Because of the complexity of nonlinear wind power system, traditional PID control is difficult to meet the requirements of system performance and high accuracy. In order to realize the real-time adjustment of this system, simulation modules are built in Simulink environment, and fuzzy theory is used on the base of traditional PID control. The experimental results manifest that the use of fuzzy control can make the system to achieve better dynamic performance. The simulation experiment with Simulink can not only promote students’ efficient learning and understanding the theoretical knowledge; but also improve their simulation ability so as to grasp the static and dynamic processes of variable pitch control system. This kind of method combines theory and practice, and is effective in improving teaching quality.
wind turbine; variable pitch; simulation; fuzzy PID control
2015-10-22
重庆邮电大学教育教学改革项目(XJG1522);重庆市高等教育教学改革研究重点项目(132016)
陈功贵(1964-),男,湖北恩施人,博士,教授,主要从事电气工程专业的教学和科研工作。
Tel.:15310488567;E-mail: chenggpower@126.com
TM 614; G 434
A
1006-7167(2016)04-0090-05
猜你喜欢
太阳能(2019年10期)2019-10-29 07:25:08
中医眼耳鼻喉杂志(2019年2期)2019-04-13 05:23:46
大电机技术(2018年4期)2018-09-26 03:11:38
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年1期)2016-04-16 04:57:28
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2016年2期)2016-02-27 09:05:15
电源技术(2015年11期)2015-08-22 08:50:38
电气传动自动化(2014年6期)2014-03-20 13:36:22