
FlexRay总线在模块化通信导航识别系统中的应用*
2016-12-20 08:50孙文杰曾利平
电讯技术 2016年7期
孙文杰,詹 鹏,曾利平
(中国西南电子技术研究所,成都 610036)
FlexRay总线在模块化通信导航识别系统中的应用*
孙文杰**,詹 鹏,曾利平
(中国西南电子技术研究所,成都 610036)
针对新型模块化通信导航识别(MCNI)系统对高质量数据通信的实际需求,从总线速率、实时性、可靠性、可扩展性等方面分析了现有几型总线存在的适配性问题,提出将新一代FlexRay总线技术应用到MCNI系统中,构建了基于双通道冗余拓扑构型的全新的MCNI系统总线架构,并给出了总线时隙分配和硬件框图。实验结果表明FlexRay总线传输速率可达10 Mb/s,能在重负荷情况下为MCNI系统提供实时可靠的信息交互,可为其他模块化传感器系统总线设计提供借鉴。
模块化通信导航识别系统;FlexRay总线;双通道冗余拓扑结构
1 引 言
随着航空电子技术的飞速发展,机载通信导航识别(Communication Navigation Identification,CNI)系统已进入综合化、模块化时代。由于模块化CNI(Modular CNI,MCNI)系统采用了基于模块级资源综合的系统架构,因此与以前的联合式CNI架构相比,MCNI系统对系统总线的传输速率、实时性、可靠性与可扩展性等要求更高。
近几年,业内对综合化航电系统总线相关技术的研究已陆续开展:文献[1]提出了以CAN (Control Area Network)作为模块化航电系统控制总线的解决方案;文献[2]探讨了将AS5643总线作为综合化航电系统总线时传输方法的优化问题;文献[3]提出了基于串行RapidIO技术的嵌入式互连结构框架。然而,上述研究工作主要围绕的是航电系统顶层应用,针对MCNI系统专用总线的研究目前仍是空白,而将CAN、AS5643和RapidIO总线应用在MCNI系统中仍存在诸多问题。如何选择和设计一型满足MCNI系统特定需求的系统总线已成为业内亟待解决的技术难点。
为此,本文在对几型主流总线与MCNI系统适配性进行分析比对的基础上,提出将FlexRay总线技术引入MCNI系统总线的设计中,构建出了一种新型的MCNI系统总线架构。
2 MCNI系统总线设计
2.1 MCNI系统总线选型
目前,在综合化航电领域广泛应用的嵌入式系统总线主要包括CAN总线、AS5643总线、RapidIO总线。除此之外,FlexRay总线作为CAN总线的升级替代,近几年也在航空电子系统中开始应用:文献[4]描述了基于FlexRay技术的飞控计算机总线设计方法;文献[5]讨论了在数字化机载音频处理设备采用了FlexRay总线技术面临的几个关键问题。
表1对CAN总线、AS5643总线、RapidIO总线、FlexRay总线与MCNI系统的匹配性进行了比对。
表1 几型总线性能对比
Tab.1 The performance contrast of buses

总线传输带宽/(Mb·s-1)可靠性时效性可扩展性经济性技术复杂性MCNI系统要求≥4支持总线冗余确定延时≤100μs支持10个以上节点的接入COST产品适中CAN≤1不支持不支持支持是底AS5643≥100支持支持支持否高RapidIO≥1250不支持支持支持是高FlexRay≥10支持支持支持是适中
从表1可以看出:CAN总线的传输带宽不满足MCNI系统要求;AS5643总线源于民用的IEEE-1394总线,为满足MCNI系统高可靠性和确定性要求需要对原协议和硬件进行深度改进,开发成本过高且硬件体积较大;RapidIO总线是一种基于交换的高速嵌入式总线,本身并不支持MCNI系统要求的总线冗余机制,需要应用层专门设计,技术复杂度非常高;而FlexRay总线具有较高的传输速率,在采用冗余架构通信时,每条总线可提供10 Mb/s的传输带宽,是CAN总线的10倍。同时,FlexRay总线具有容错和时分复用功能,可有效保证MCNI系统数据传输的可靠性、可预测性和实时性,其支持的最大接入节点数达64个,开发费用及芯片产品价格也非常低廉,非常适合作为MCNI系统的系统总线。
2.2 MCNI系统总线拓扑结构设计
在MCNI系统总线设计中采用了FlexRay总线技术并对系统内部的控制总线和数据总线进行了综合化设计,在一个FlexRay系统总线上(含A、B两个通道)既实现突发性的控制指令传输又要完成传感器周期数据和音频信号的实时传递。基于FlexRay总线的MCNI系统总线拓扑结构如图1所示。

图1 MCNI系统总线拓扑
Fig.1 MCNI system bus topology
MCNI系统A、B总线采用了无源的总线型网络拓扑结构。为提高系统总线运行的可靠性,两条总线以双通道冗余模式运行。其中,A总线是系统主总线,B总线是系统备用总线,当A总线出现故障时,系统通过B总线实现信息的交互。
系统内部各功能模块以节点方式同时接入A、B总线。节点1是系统的主控制节点,负责解析上级航电系统的控制指令并分发到对应的其他节点,同时采集其他节点的健康状态和周期数据进而上报航电。节点2~7为MCNI系统内部的功能子节点,负责解析并执行与本节点功能相关的控制指令,按要求向节点1发送状态信息和周期数据。
2.3 总线网络设计
MCNI系统FlexRay总线A、B的传输速率均设定为10 Mb/s,由于MCNI系统各传感器及系统状态数据以50 ms为周期传输数据,为保证数据传输的实时性将总线通信周期设定为2 ms,其中1.8 ms的静态部分用于传输静态报文,0.02 ms的特征符窗口用于发送唤醒和避免冲突特征符,0.18 ms的网络空闲时间用于进行分布式时钟同步。
MCNI系统FlexRay总线静态时隙配置情况见表2。
表2 MCNI系统FlexRay总线静态时隙配置情况
Tab.2 Static slot configrations of MCNI system FlexRay bus
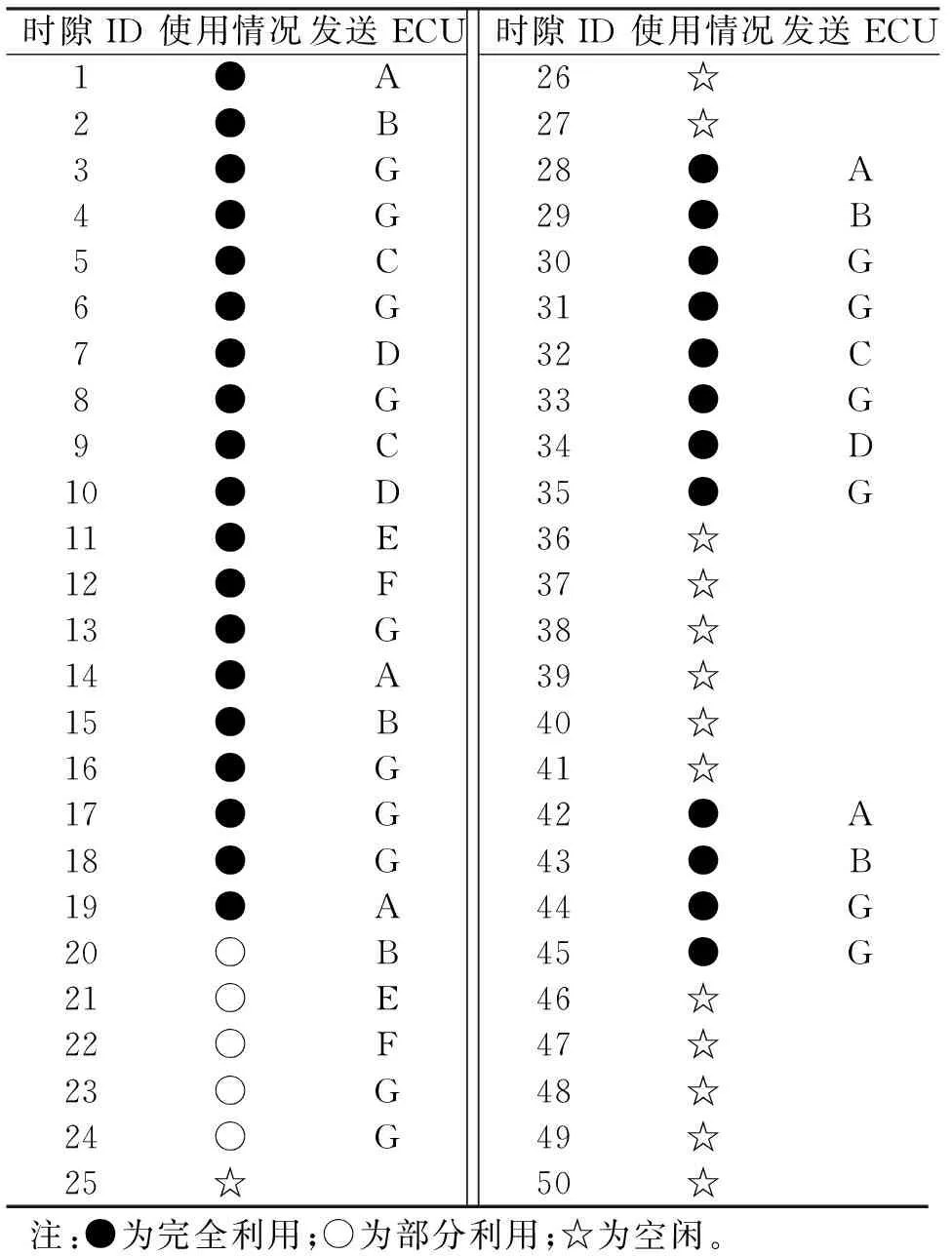
时隙ID使用情况发送ECU1●A2●B3●G4●G5●C6●G7●D8●G9●C10●D11●E12●F13●G14●A15●B16●G17●G18●G19●A20○B21○E22○F23○G24○G25☆时隙ID使用情况发送ECU26☆27☆28●A29●B30●G31●G32●C33●G34●D35●G36☆37☆38☆39☆40☆41☆42●A43●B44●G45●G46☆47☆48☆49☆50☆注:●为完全利用;○为部分利用;☆为空闲。
为避免总线上出现消息竞争以提升总线运行的可靠性,将MCNI系统总线划分为50个静态时隙,每个时隙分配给某一消息ID,总线上的消息全部在静态部分采用时分多址(Time Division Multiple Access,TDMA)时序传输。静态帧有效数据长度为16 B,静态时隙长度为0.036 ms(考虑了帧头部、CRC 校验、传输起始序列、帧起始序列、字节起始序列、帧结束序列及偏移量等因素)。
2.4 总线节点设计
FlexRay总线节点有3种架构:微处理器+通信控制器+总线驱动器、微处理器+总线驱动器以及微处理器。在MCNI系统总线节点设计时选用了微处理器+通信控制器+总线驱动器架构。节点硬件框图如图2所示。

图2 FlexRay总线节点硬件框图
Fig.2 Block diagram of FlexRay bus node hardware
为减少模块内部CPU的数量,对MCNI系统功能子板的数据处理CPU进行了功能扩展。该CPU除负责处理与某一传感器功能相关的数据外还负责初始化FlexRay通信控制器,接收或发送FlexRay总线数据。接口子板的通信控制器对总线数据按照FlexRay协议要求进行处理。总线收发器完成数字逻辑信号与物理电平信号之间进行转化,发送时将来自通信控制器的数据进行编码并发送到总线上,接收时将总线数据进行解码后上传给通信控制器。MCNI系统总线节点芯片选型见表3。

表3 MCNI系统FlexRay总线节点硬件组成Tab.3 Hardware components of MCNI system FlexRay bus node
3 仿真验证
按照某型高级教练机MCNI系统的实际构型,在运行Windows XP操作系统的 PC上采用DaVinci Network Designer软件建立了系统的FlexRay网络模型,并将建好的FlexRay网络导入CANoe软件中进行仿真测试(由于该型机MCNI系统总线的A通道与B通道为备份冗余关系,实验只涵盖总线的A通道)。网络中共7个传感器功能节点和1个总线监控节点。
实验对总线上帧数据的传输时刻、传输通道、帧ID、数据载荷具体内容、总线循环周期等数据进行了捕获,对总线上不同ID静态数据帧的数量、频率、静态帧有效载荷等数据进行了统计分析。通道ID和帧统计数据见图3,总线监测数据见图4。

图3 通道ID和帧统计图
Fig.3 Channel ID and frame statistics
Fig.4 Bus monitoring and statistics
4 结束语
现有的MCNI系统大多采用CAN作为系统的主总线,存在带宽不足、传输时延不确定、可靠性不高等问题,而支持冗余构型的FlexRay总线不仅成本低、传输速率快,而且实时性强、可扩展性好,很好地满足了MCNI系统的各项需求。目前,基于FlexRay总线构建的MCNI系统已在实际工程中得到应用,系统运行稳定、可靠。总线网络拓扑构型和节点设计方法对其他模块化传感器系统的总线设计也有一定的参考价值。今后可在总线负荷智能均衡、总线故障判决及自动切换等方面开展进一步的研究。
[1] 杨斌,李阜东.CAN总线在航空模块化综合系统中的应用[J].电讯技术,2009,49(5):43-48. YANG Bin,LI Fudong.Application of CAN bus in modular integrated avionics systems[J].Telecommunication Engineering,2009,49(5):43-48.(in Chinese)
[2] 詹鹏,张振刚.AS5643总线优化传输方法研究[J].计算机测量与控制,2015(2):571-573. ZHAN Peng,ZHANG Zhengang.Research on optimization transmission method of AS5643 bus[J].Computer Measurement & Control,2015(2):571-573.(in Chinese)
[3] 邓豹,赵小冬.基于串行RapidIO的嵌入式互连研究[J].航空计算技术,2008(5):123-126. DENG Bao,ZHAO Xiaodong.Research of the embedded interconnection frame based on serial RapidIO technology[J].Aeronautical Computing Technique,2008(5):123-126.(in Chinese)
[4] 章勇.基于FlexRay飞行控制计算机总线设计与研究[D].南京:南京航空航天大学,2013. ZHANG Yong.Design and research on FlexRay bus munication for flight control computer[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2013.(in Chinese)
[5] 李锋.机载数字音频通信系统设计与实现[D].成都:电子科技大学,2013. LI Feng.Design and application of aircraft intercommunication system[D].Chengdu:University of Electronic Science and Technology of China,2013.(in Chinese)

孙文杰(1971—),男,河北景县人,高级工程师,主要研究方向为综合化航空电子;
SUN Wenjie was born in Jingxian,Hebei Province,in 1971.He is now a senior engineer.His research concerns integrated avionics system.
Email:sun_no1@sina.com
詹 鹏(1982—),男,重庆人,工程师,主要研究方向为综合化航空电子;
ZHAN Peng was born in Chongqing,in 1982.He is now an engineer.His research concerns integrated avionics system.
曾利平(1975—),男,四川内江人,工程师,主要研究方向为综合化航空电子。
ZENG Liping was born in Neijiang,Sichuan Province,in 1975.He is now an engineer.His research concerns integrated avionics system.
Application of FlexRay Bus in Modular Communication Navigation and Identification System
SUN Wenjie,ZHAN Peng,ZENG Liping
(Southwest China Institute of Electronic Technology,Chengdu 610036,China)
According to the requirement of high data communication quality for novel modular communication navigation and identification (MCNI)system,the suitability problem existing in several kinds of bus is analyzed from the aspect of bus speed,real-time characteristic,reliability and expansibility.New generation of FlexRay bus technology is applied in MCNI system,a novel MCNI system bus architecture based on double channel is constructed,and the bus time distribution and hardware diagram is given in this paper.Experiment result shows the transmission speed of the FlexRay bus is up to 10 Mb/s.This strongpoint can support real-time and reliability information communication for MCNI under heavy traffic load.The technology proposed in this paper can be used in modular sensor system bus design for reference.
modular CNI system;FlexRay bus;redundancy architecture
10.3969/j.issn.1001-893x.2016.07.016
孙文杰,詹鹏,曾利平.FlexRay总线在模块化通信导航识别系统中的应用[J].电讯技术,2016,56(7):804-807.[SUN Wenjie,ZHAN Peng,ZENG Liping.Application of FlexRay bus in modular communication navigation and identification system[J].Telecommunication Engineering,2016,56(7):804-807.]
2015-11-20;
2016-04-12 Received date:2015-11-20;Revised date:2016-04-12
TN802
A
1001-893X(2016)07-0804-04
**通信作者:sun_no1@sina.com Corresponding author:sun_no1@sina.com
猜你喜欢
海洋信息技术与应用(2022年1期)2022-06-05
云南画报(2021年8期)2021-11-13
北京航空航天大学学报(2021年6期)2021-07-20
舰船电子对抗(2020年2期)2020-06-23
现代装饰(2020年5期)2020-05-30
铁道通信信号(2018年9期)2018-11-10
中国核电(2017年2期)2017-08-11
流程工业(2017年4期)2017-06-21
舰船电子对抗(2016年3期)2016-12-13
广西大学学报(自然科学版)(2016年5期)2016-11-12
