
基于时序特征编码的目标战术意图识别算法∗
2016-12-20 07:20柳少军贺筱媛郭圣明
指挥控制与仿真 2016年6期
欧 微,柳少军,贺筱媛,郭圣明
(1.国防大学信息作战与指挥训练教研部,北京 100091,2.乌鲁木齐民族干部学院,新疆乌鲁木齐 830002)
基于时序特征编码的目标战术意图识别算法∗
欧 微1,2,柳少军1,贺筱媛1,郭圣明1
(1.国防大学信息作战与指挥训练教研部,北京 100091,2.乌鲁木齐民族干部学院,新疆乌鲁木齐 830002)
对战场目标战术意图的快速、准确和自动识别,是智能决策的前提和基础。目标战术意图通常由多个战术动作组合完成,因而目标状态呈现动态、时序变化特征。本文针对目标意图识别问题的特点,提出一种基于栈式自编码器(SAE)的智能识别模型,设计智能识别模型的基本框架,提出一种基于时序特征的输入信号编码方法及相应的模式解析机制,通过将目标状态在多个时刻的时序特征和战场环境、目标属性等信息统一编码为输入信号,将军事专家的知识经验封装为模式标签,模拟人的推理模式与认知经验,实现对目标战术意图的智能识别。最后通过实验,分析预训练过程和网络深度对算法性能的影响,并通过与多层感知机(MLP)和逻辑回归分类器(LRC)识别准确率的比较,验证所提SAE算法的有效性。
意图识别;时序特征;栈式自编码器;深度学习
目标战术意图识别是战场态势评估的核心内容,是智能决策的前提和基础。在信息化条件下,随着战场信息量剧增和敌我对抗复杂化,单纯依靠人工方式很难胜任从多源战场数据中实时、准确地识别敌目标战术意图的需求。战术意图识别是高度抽象的思维活动,需要在军事知识和作战经验的基础上,综合考虑战场环境、目标属性、目标状态的动态变化特征等信息,通过关键特征提取、比较分析、联想和推理等一系列思维活动来实现[1⁃2]。因此,需要设计智能意图识别模型,既能利用计算机高效的计算能力来克服人工处理方式在实时性和计算精度上的不足,同时又结合人类推理模式和认知经验的潜在优势,实现对目标战术意图的智能、实时地分析,推理和判断。
意图识别在本质上属于模式识别的范畴,通常由模板匹配、证据理论、贝叶斯网络和专家系统等一种或多种方法组合实现[3⁃8]。这些方法针对不同背景的作战问题取得了一些应用,但在知识表示和时序特征挖掘上仍存在一定的局限性:首先,模板匹配技术标准模板库的建立,证据理论中证据信息的收集与概率分布函数的构造,贝叶斯网络的结构和概率分布参数的确定,专家系统的知识库和推理机的构造,都需要组织、抽象并显式描述领域专家的经验知识,知识表示和工程实现难度大[3⁃5]。其次,目标的战术意图通常由多个战术动作组合完成,从而导致目标状态呈现动态特征,而且这些特征会表现出一定的时序性和关联性。然而,目前大量的研究工作仍主要依据目标在单一时刻的状态特征来推测其战术意图,难以有效地从时序变化的目标状态特征中分析、挖掘其中隐含的深层信息[6⁃7]。
深度学习(Deep Learning,DL)是对传统人工神经网络(Artificial Neural Network,ANN)的继承和发展,有效克服了传统ANN在网络训练、特征提取和计算精度等方面面临的困难与不足,已经成为当前人工智能最热门的一个研究领域[8⁃9]。深度学习的研究动机在于通过建立、模拟人脑的深层神经网络,采用数据驱动的方式,从原始数据中提取由低层到高层、由具体到抽象、由一般到特定语义的特征,进而模拟人脑推理与思考的过程。栈式自编码器(Stacked Auto⁃Encoder,SAE)是一种常用的深度学习框架,具有良好的特征提取和泛化能力,已经在语音识别、图像处理和数据降维等领域取得了广泛应用[10]。鉴于此,本文提出一种基于SAE算法的目标战术意图智能识别模型,通过将战场环境、目标属性,以及目标在连续多个时刻的状态信息的统一编码,描述输入信号的时序特征,并通过将领域专家的认知经验封装为相应的模式标签,以有效克服传统算法在知识表达上面临的困难。
1 目标战术意图识别问题描述
战场目标战术意图识别是在高度对抗的条件下进行的,属于对抗识别的范畴。由于被识别目标会尽量隐藏自己的战术企图,因而侦察到的目标在单一时刻的信息往往存在虚假和误导信息;而由于目标的战术意图是通过一系列战术动作完成的,因而其战术意图通常隐含在连续多个时刻时序变化的状态信息中[11]。因此,从目标在多个时刻的状态信息中,分析、挖掘、推测其中隐含的战术意图,将有效提高对目标战术意图识别的科学性,基于时序特征的目标战术意图识别过程如图1所示。
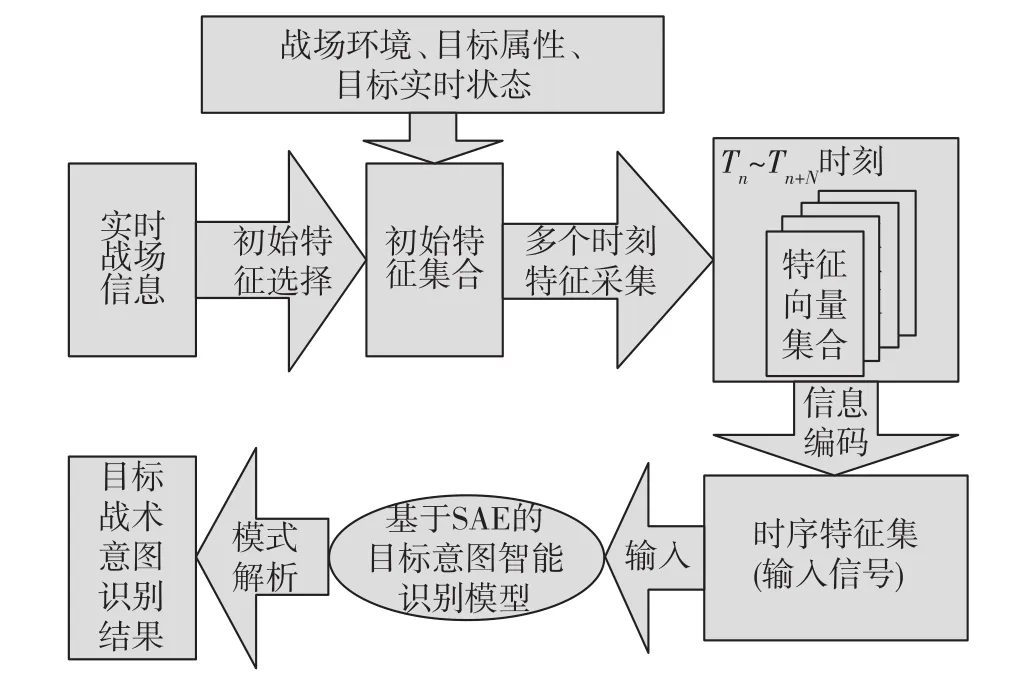
图1 目标战术意图识别过程
如图1所示,基于目标时序特征编码的战术意图智能识别过程如下:1)从实时战场数据中选择、提取与目标战术意图相关的数据信息,包括相应局部时空域内的战场环境信息、目标属性信息,以及目标的实时状态信息等,形成初始特征集合;2)采集连续N个时刻(Tn~Tn+N)目标的状态特征数据,采用堆栈方式存储,形成特征向量集合;3)整合Tn~Tn+N个时刻的特征数据,归一化并统一编码,形成标准化的时序特征集;4)将时序特征集作为意图识别模型的输入信号,由SAE算法进行识别,并通过模式解析输出目标战术意图的识别结果。
2 目标战术意图识别算法关键技术
目标战术意图识别是从实时、共享的态势数据中,抽取相应时空域内的战场环境数据,以及目标的静态属性和实时状态信息,分析、推断目标战术意图的过程。其中,输入信号的特征选择与编码方法、基于SAE的意图识别算法、知识表示与模式解析机制是实现战术意图智能识别的关键技术。
2.1 基于栈式自编码器的意图识别模型
本文基于SAE算法,实现目标战术意图的智能识别模型。SAE以自编码神经网络(Auto⁃Encoder Neural Network,AENN)为基本的网络单元,AENN的基本原理是首先对输入信号进行编码,得到编码后的输出信号(output features),然后对输出信号解码,获取重构信号,再将重构信号与原始信号进行对比,计算重构误差。AENN以重构误差最小为优化目标,通过将输入信号编码成为另一种形式,提取其中的关键信息。最后将AENN逐层叠加,在顶层增加一个逻辑回归层,就构成了深层SAE网络。SAE通过无监督的训练方法优化各层AENN的参数,并通过有监督的方法对网络参数进行微调,其基本结构如图2所示[8]。
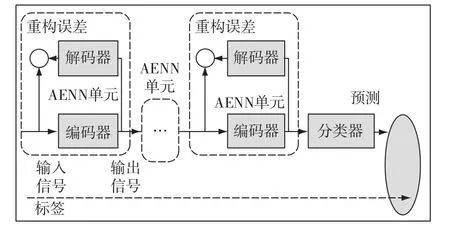
图2 栈式自编码器结构图
如图2所示,在AENN的每一层,都包含一个编码器(Encoder)和一个解码器(Decoder),其是一种直接将输入映射成输出特征的反向传播算法。SAE将上一层AENN的输出作为下一层AENN的输入,每一层单独进行优化,通过对原始信号作逐层的编码表达,最终得到隐含在输入信号内部的深层数据关系,提取其中的高层抽象特征。
目标战术意图理解是战场情况判断的核心内容,而情况判断本身就是一个“去粗存精、去伪存真、由此及彼、由表及里”的思索过程。因而,深层SAE网络由低层到高层、由具体到抽象的特征提取过程,与指挥员从复杂战场态势中捕捉关键特征,进而分析、判断和推测目标战术意图的过程是类似的。因此,本文首先利用样本数据对智能识别模型进行训练,然后将训练好的模型应用于目标意图识别,基本过程如下:1)利用无标签样本,采取无监督的预训练过程,以重构误差最小为优化目标,逐层优化AENN的网络参数;2)利用带标签的样本数据,采用有监督的训练方法,通过反向误差传播算法,对SAE网络的各层参数进行微调;3)在完成网络训练后,利用测试样本对训练好的模型进行测试,若满足精度要求,则保存模型参数,将其应用于目标战术意图的自动识别;若不满足精度要求,则返回步骤1),调整网络结构和模型训练参数,继续对模型进行训练。
可见,利用深层SAE网络无监督地从时序特征向量中提取关键信息,是模拟指挥员在进行情况判断时的特征提取和抽象思维过程;同时,将指挥员的认知经验封装为训练样本的模式标签,并利用这些带标签数据样本,采用有监督的方式训练SAE模型,是模型学习指挥员的认知经验的过程。因而,上述意图识别模型既能自主捕捉输入向量中所隐含的深层特征信息,又能较好地模拟和学习人在战争中的推理模式与认知经验。
2.2 基于时序特征的样本编码方法
由于目标的作战意图是通过一系列的战术动作来完成的,因而目标状态将呈现出一定的时序变化特征。因此,指挥员在判断目标战术意图时,通常需要结合战场环境、目标属性和前后多个时刻的状态特征,经过分析、判断和推理,最终得出目标战术意图的判断结论。对于设计智能识别模型而言,要模拟指挥员进行战术意图判断的过程,其首要任务是采集目标在多个时刻的状态特征,并编码形成时序特征向量,作为智能识别模型的输入信号。
2.2.1 初始特征的采集


将当前目标连续采样TN个时刻,则目标状态变化矩阵AS(TN,LS)如式(3)所示。

其中,LE为描述战场环境信息向量的采样维度,LA为描述目标静态属性向量的采样维度,TN为连续侦查的时间步数,Ls为单个时刻采集的目标动态特征的维度。式(1)中分别表示相应局部时空域内的战场环境信息;式(2)中分别表示目标静态属性信息;式(3)中,表示目标的在Ti时刻第j种动态特征。
2.2.2 数据归一化处理
由于在SAE网络模型中,每一个AENN节点都采用Sigmoid函数计算激励,而算法的输入信号由战场环境、目标属性和目标的实时状态信息等多个部分组成,而且各组成部分又分别包含了多个维度的复杂、异构数据,因而需要对输入样本进行归一化处理。记归一化后的战场环境信息向量为XE,XE={x1,x2,…,xLE}。采用极值归一化法,将xi(i∈[1,LE])数据放缩到[0,1]范围内,计算方法如式(4)所示。

其中,δ为一个非常小的常数,以防止maxi=minj时分母为0(这里取δ=10-6);mini和maxj分别表示在所有样本中第i个维度出现的最小值和最大值;L和U分别表示期望上界和下界,这里分别取0和1。同样,用分别表示归一化后的目标属性和第Tn时刻的状态特征,其归一化方法与上述过程一致,这里不再赘述。
2.2.3 特征数据编码方法
在归一化处理后,将上述信息进行整合,依次加入到特征向量X中,则X为对SAE算法的一组输入信号的描述(对应一个输入样本),其编码方法如图3所示。

图3 输入特征编码方法
可知,整合后的输入信号X的编码长度为L=LE+ LA+TN·LS。这里以空中目标战术意图识别为例简要介绍编码方法。其中,战场环境主要考虑地形、天候、风向、通视性等局部时空域内的属性信息,目标属性主要考虑发现距离、初步判明的目标类型和同一批目标的数量等信息,目标状态主要考虑目标的飞行高度、速度、航向,以及雷达信号特征,包括重频、脉宽、载频和散射截面积RCS等实时信息。在编码时,首先将各个维度的信息映射到实数空间(主要指地形、天候、风向等离散信息),然后分别进行归一化处理,再统一编码表示。以战场地形为例,本文主要考虑平原、丘陵、山地、盆地和高原五种地形,分别将其映射为1-5之间的数字,然后进行归一化,则在相应维度上,0代表平原,0.25代表丘陵,1代表高原。对于飞行高度、飞行高度等连续数值空间的状态信息,直接进行归一化即可。最后,进行统一编码表示,构成一组标准的输入信号。
在上述编码方法中,将相应的局部时空内的战场环境、目标属性,以及目标在多个时刻的状态信息编码标准的特征序列,既考虑了目标遂行战术意图的时空条件,又反映了目标类型、固有属性对目标遂行战术意图的能力和任务约束;同时,由于整合了目标在多个时刻的动态特征,因而能较好地描述目标在战场中执行一系列战术动作所带来的动态特征改变,从而为模型从多个时刻的时序状态特征中推测目标的战术意图奠定基础。
2.3 战术意图空间抽象与模式解析
目标意图识别是一种典型的模式识别问题,而实现模式识别的前提对分类模式有清晰的界定和描述,即确定问题域对应的模式空间。对于意图识别而言,针对不同的想定背景、不同的作战样式和不同的目标实体,所对应的模式空间是存在差异的。因此,需根据相应的作战背景,以及敌方目标的基本属性和可能担负的作战任务,来定义目标的战术意图空间。如文献[4]针对水下目标潜在的威胁目标,建立目标的意图空间为{攻击、规避、巡逻}等;文献[7]提出的水面舰艇编队的意图空间包括{反舰作战、护航运输、反潜作战、扫雷作战}等;文献[12]定义舰艇战术意图包括{巡逻、防空、搜潜、攻击、规避}等;文献[8]定义空中目标的战术意图包括{侦察、监视、攻击、突防}等。本文以近岸空袭目标为研究对象,确立敌目标的战术意图空间包括{侦察、监视、佯动、攻击、突防、诱敌、撤退}七种模式。
在意图空间确立后,如何将人的认知模式抽象为指导模型训练的模式标签,并确定其在战术意图空间中所代表的分类模式,是将SAE模型应用于战术意图识别的关键问题。分析指挥员推测敌方目标战术意图的过程可知,当指挥员看到战场态势数据或综合态势图后,需通过关键特征提取、结合自身认知经验并综合分析多种因素,最终推断敌方目标可能的战术意图。其中,人的认知经验主要隐含在对过往的特征向量对应的目标战术意图的推理结果中,因而,为了将这些认知经验转换为指导深层神经网络学习的知识,需针对样本集中的训练样本,结合人类的认知经验对其进行识别,并将相应结果封装为指导模型训练的标签知识。针对文中确立的目标战术意图空间,相应的知识封装与模式解析机制如图4所示。

图4 知识封装与模式解析
对于战术意图空间中的意图模式,分别设置相应0、1、2、3、4、5、6共7类标签值。在构建带标签的样本集时,需将人类对样本集中相应特征向量的评估结果抽象、封装为SAE的样本标签;而当将SAE应用到实际的战术意图推理时,只需将SAE模型输出的标签值映射为相应模式,即为目标战术意图的判断结论。比如,若SAE输出的标签值为3,则相应目标的战术意图为执行“攻击”任务。可见,采用上述知识封装与模式解析机制,能清晰、完整地描述人的经验知识,并便于工程实现。
3 实验测试与结果分析
本文以某区域近岸空袭目标为研究对象,实验数据从某作战仿真系统提取。采用文中所述数据处理与编码方法,每个样本采集相应目标连续10帧的状态信息。分别构建训练样本集(含10000个训练样本)、校验样本集(含2000个校验样本)和测试样本集(含2000个测试样本),然后由研究人员依据认知经验,分别为样本标注模式标签(由于样本数量过多,为避免随意性并确保实验可行,模式标签首先由计算机按预置规则生成,然后由领域专家据经验进行修订)。记隐含层数为NH,各隐含层节点数为HLS;网络预训练的最大迭代次数为ep1,学习因子为ζ1;监督训练的最大迭代次数为ep2,学习因子为ζ2。首先分析无监督预训练过程对SAE网络的收敛性能的影响。
3.1 无监督预训练对收敛效率的影响
SEA结构参数如下:NH=3,HLS=[256,128,128]。首先,通过无监督的预训练过程优化网络参数,令学习因子ζ1=0.02,分别设置3组预训练迭代参数:1)不进行预训练,ep1=0,记为SAE-NUP;2)进行预训练,ep1=50,记为SAE-UP50;3)进行预训练,ep1=100,记为SAE-SP100。然后采取监督学习对网络参数进行微调,令ep2=200,ζ2=0.02。分别进行多次实验,统计相应SAE网络在监督训练过程的校验误差,如图5所示。

图5 无监督预训练对收敛效率的影响
由图5可见,当SAE模型进入到有监督训练阶段,预训练迭代次数为100的SAE网络(SAE-UP100)对应模型的校验误差下降最快,SAE-UP50次之,而SAE -NUP速度最慢;截至到监督学习200代,SAE-UP100、SAE-UP50和SAE-NUP对应的校验误差分别下降到了27.5%、26.8%和22.9%。这说明,所提的SAE模型具有良好的收敛性能,而通过引入无监督的预训练过程,并适当增加预训练的迭代次数,将有效降低SAE模型的训练难度,并明显提升其收敛速度与计算精度。
3.2 网络深度对SAE算法性能的影响
保持隐含节点总体数目不变,分别设置不同的隐含层数,分析网络深度对算法性能的影响。基于5组结构参数分别构建SAE模型:1)NH=1,HLS=[512],记为SAE-HL1;2)NH=2,HLS=[256,256],记为SAEHL2;3)NH=3,HLS=[256,128,128],记为SAE-HL3;4)NH=4,HLS=[256,128,64,64];5)NH=5,HLS=[256,128,64,32,32],记为SAE-HL5。所有SAE模型采用相同的训练参数:ep1=100,ζ1=0.02,ep2=200,ζ2=0.02。分别进行多次实验,统计相应的校验误差,统计结果如图6所示。

图6 网络深度对算法性能的影响
由图6可见,随着隐含层数的增加,模型的收敛性能也逐渐提升,具有三个隐含层的SAE模型的性能明显优于单隐含层和双隐含层SAE模型;当隐含层数增加到四层,相应模型在前期的收敛速度慢于三隐含层的SAE模型,但在训练后期又表现出了比SAE-HL3更优的收敛性能;而当隐含层增加到五层,截至模型监督学习迭代200次,其收敛速度和计算精度均明显低于含有三个隐含层和四个隐含层的SAE模型。因而可知,在隐含节点总数一定的情况下,适度增加SAE的网络深度,将有效提高算法的收敛效率和计算精确;但当网络达到一定深度后,再试图通过增加隐含层数提升算法性能,效果并不理想。
3.3 SAE模型与其它模型应用测试比较
基于多层感知机(Multi⁃LayerPerception,MLP)[8]、逻辑回归分类器(logistic regression classifier,LRC)[9],以及基于不同网络深度和训练方法的SAE模型,采用相同的输入特征编码方法和模式解析机制,分别实现目标战术意图的智能识别模型。然后基于同一测试样本,分别进行测试并统计相应的识别准确率,如表1所示。
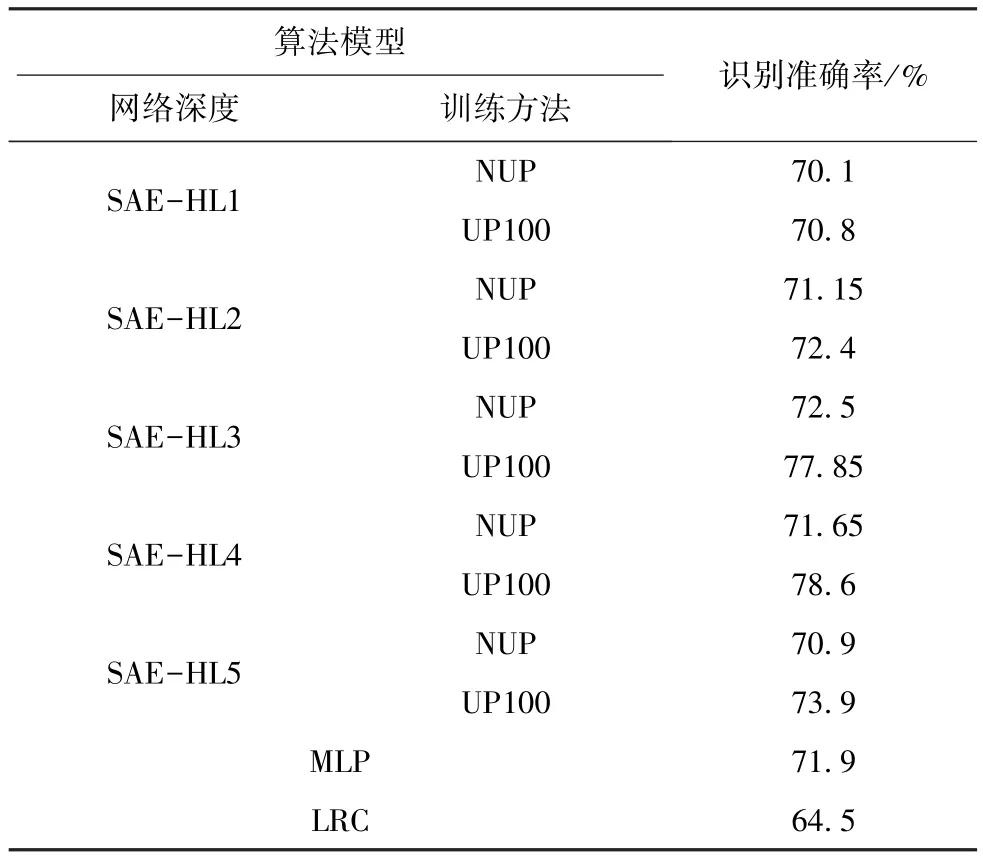
表1 不同意图识别模型识别的准确率
由表1的测试结果可见,隐含层数目为4,预训练100代的SAE模型对目标战术意图识别的准确率最高,达78.6%;而具有3隐含层、预训练100代的SAE模型略次之,约为77.85%。基于MLP的意图识别模型的准确率约为71.9%,优于基于LRC的意图识别模型(64.5%)。所有的SAE模型均保持了较高的准确率,都在70%以上,接近或优于MLP模型。这说明,对于具有高度对抗性和主观性的意图识别问题,本文所提的SAE算法具有较高的识别准确率,是实现目标战术意图识别的一种有效算法。需要指出的是,在实验过程中我们发现,随着训练样本集的扩充和有监督训练迭代次数的增加,模型的识别精度仍将会随之提升。目前,针对本文实验的数据集,当训练样本增加到20000个,有监督训练迭代1000次时,SAE-HL4对应模型在的识别准确率可达到82.65%。
4 结束语
目标战术意图具有很强的隐蔽性、欺骗性和对抗性。因而,战术意图识别是一种高度对抗的复杂思维活动,需从战场目标动态、时序变化的状态信息中提取关键特征,并结合作战背景、战场环境、目标属性等多种因素,通过特征提取、对比分析、联想和推理等一系列思维活动,来推测目标的战术意图,很难通过显式的数学公式来描述和归纳。本文提出一种基于栈式自编码器(SAE)的目标战术意图识别模型,以模拟指挥员进行情况判断的思维模式,并通过训练学习人认知经验,进而实现对目标战术意图的智能识别,最后分析了无监督预训练过程与SAE网络深度对模型性能的影响,并通过与多层感知机(MLP)和逻辑回归分类器(LRC)的对比实验,验证基于SAE算法的智能意图识别模型的有效性。如何提高智能模型对高维时序特征的抽象和推理能力,是我们下一步研究的重点。
[1] 邓海军,尹全军,胡记文,等.基于MEBN的战术意图识别[J].系统工程与电子技术,2010,32(11):2374⁃2379.
[2] Levchuk G M,Grande D,Pattipati K R,et al.Mission Plan Recognition:Developing Smart Automated Opposing ForcesforBattlefieldSimulationsandIntelligence Analyses[C]//.13th ICCRTS⁃2008“C2 for Complex En⁃deavors”,2008.
[3] 王昊冉,老松杨,白亮,等.基于MEBN的战术级空中目标意图识别[J].火力与指挥控制,2012,37(10):133⁃138.
[4] 陆光宇,丁迎迎.水下平台对敌意图识别技术研究[J].指挥控制与仿真,2012,34(6):100⁃102.
[5] 张肃,程启月,解瑶,等.不确定空情信息条件下的意图识别方法[J].空军工程大学学报(自然科学版),2008,9(3):50⁃53.
[6] 孙越林,包磊.基于D⁃S证据理论的海战场目标战术意图识别技术研究[J].舰船电子工程,2012,32(5):48⁃51.
[7] 冷画屏,吴晓锋,胡剑光.海上目标战术意图序贯识别技术研究[J].系统工程与电子技术,2008,30(3):62⁃65.
[8] Schmidhuber J.Deep learning in neural networks:An o⁃verview[J].Neural Networks the Official Journal of the International Neural Network Society,2015(61):85⁃117.
[9] Deng L,Yu D.Deep Learning:Methods and Applications[J].Foundations&Trends in Signal Processing,2013,7(3):197⁃387.
[10]Vanhoucke V.Adaptive auto⁃encoders:US,US8484022[P].2013,1⁃20.
[11]Cai Z,Feng Y,Gan Y,et al.Research on Plan Recogni⁃tion Based on Misleading Action Processing[J].The Open Automation and Control Systems Journal,2014,6(1):1029⁃1037.
[12]牛晓博,赵虎,张玉册.基于决策树的海战场舰艇意图识别[J].兵工自动化,2010,29(6):44⁃46.
Tactical Intention Recognition Algorithm Based on Encoded Temporal Features
OU Wei1,2,LIU Shao⁃jun1,HE Xiao⁃yuan2,GUO Sheng⁃ming1
(1.Department of Information Operation&Command Training,NDU,Beijing 100091;2.Urumqi Border Cadre Training Unit,Urumqi 830002,China)
Automatic and fast intention recognition is the premise and bedrock of intelligent decision⁃making,and it refers to the process of deducing the intention of a target from a set of observed actions with dynamic and temporal characteristics. Here,an automatic tactical intention recognition model based on deep learning methods of stacked auto⁃encoder(SAE)is proposed.The temporal features and attributes of corresponding target and battlefield environment are encoded as the input signal,and then the recognition experience of domain expert are encapsulated and labeled as knowledge to train the intelli⁃gent model so as to simulate the deducing and cognition mode of human.Finally,the influence of pre⁃training and the depth of the SAE network on the performance are analyzed,and the validation of SAE model was illustrated by comparison of recog⁃nition accuracy ratios with that obtained by the models based on multi⁃layer perceptron(MLP)and logistic regression classi⁃fier(LRC).
tactical intention recognition;temporal features;stacked auto⁃encoder;deep learning
E917;E391.9
A
10.3969/j.issn.1673⁃3819.2016.06.008
1673⁃3819(2016)06⁃0036⁃06
2016⁃07⁃03
2016⁃07⁃22
国家自然科学基金(60403401,61374179,6127318 9,61174156,61174035);全军军事学研究生课题(2015JY035)
欧 微(1983⁃),男,湖南武冈人,博士研究生,讲师,研究方向为战争模拟与智能决策。
柳少军(1962⁃),男,教授,博士生导师。
贺筱媛(1968⁃),女,副教授,硕士生导师。
郭圣明(1981⁃),男,博士后。
猜你喜欢
法律方法(2022年2期)2022-10-20
导航定位学报(2022年5期)2022-10-13
福建基础教育研究(2022年4期)2022-05-16
小哥白尼(军事科学)(2022年1期)2022-04-26
小猕猴智力画刊(2022年3期)2022-03-28
法律方法(2021年3期)2021-03-16
小哥白尼(军事科学)(2021年10期)2021-02-12
意林(2020年20期)2020-11-06
铁道建筑技术(2020年11期)2020-05-22
电子制作(2017年13期)2017-12-15
