
基于ADAMS/CAR的整车操纵稳定性仿真及优化
2016-12-13 05:55李慧聪勾治践任明辉
长春工业大学学报 2016年5期
李慧聪,勾治践,任明辉
(1.长春工业大学 机电工程学院,吉林 长春 130012;2.杭州师范大学 钱江学院,浙江 杭州 310016;3.中国第一汽车集团公司技术中心,吉林 长春 130012)
基于ADAMS/CAR的整车操纵稳定性仿真及优化
李慧聪1,勾治践2*,任明辉3
(1.长春工业大学 机电工程学院,吉林 长春 130012;2.杭州师范大学 钱江学院,浙江 杭州 310016;3.中国第一汽车集团公司技术中心,吉林 长春 130012)
依据多体系统动力学理论,采用虚拟样机技术ADAMS/CAR创建完整的整车模型,并在INSIGHT模块进行优化,对悬架的硬点坐标及性能进行改进,最后对整体进行仿真与计算。选取阶跃转向和蛇形实验来对目标车辆进行操纵稳定性能的评价。
ADAMS/CAR;操纵稳定性;优化设计;阶跃转向;蛇形实验
0 引 言
汽车的操纵稳定性能与其悬架特性联系较为紧密,指驾驶员在没有明显的慌张、劳累状态下,汽车可以按方向盘给定的由车主意志控制的路线前进。德国人阿达姆·措莫托[1]介绍了车辆行驶过程中性能的测试与评价;德国汽车专家赖姆帕尔[2]从悬架各部件的计算设计以及悬架类型特点对悬架性能做出了完整的分析;日本学者安部正人[3]在汽车受力与运动时,对悬架建立了较为完整的动力学方程,对悬架的主要部位开展了严密的计算;天津大学的潘筱[4]等依据后悬架拓扑结构仿真模型,得出了改进后的车辆在行驶稳定及操纵方面有了较大的提升。根据国家相关标准规定,操纵稳定性能的分析应该从稳定状态回转、转向盘角阶跃输入、转向操纵轻便和蛇形等多个方面进行评价[5]。文中选用ADAMS软件中的汽车模块来对车辆转向瞬态响应和蛇形行驶进行仿真计算。
1 汽车整车模型的建立
1.1 前悬架结构模型的建立
文中所研究的是发动机后置的汽车模型,发动机后置可使车身在重量分布方面大大改善,提升了整体的平衡性和操控性。前悬架采用的是双叉臂独立悬架,该悬架的结构特点为其所拥有的两个上下不等长设置的A字形的叉臂(上短下长),两个A字形臂共同承担了侧向外力,支柱只对汽车的车体起到支撑作用,横向刚度与纵向刚度性能优异,是双叉臂悬架的杰出特性。前轮方位的各项数据可由该悬挂的两个A臂精确标定,当行驶方向发生改变时,轮胎受到的侧向外力可被该双A字形臂吸收,因此,双叉臂式独立悬架在方向发生变化时的抵抗侧向倾斜的能力比其他悬架好,操纵稳定性好。此外,两叉臂长度不同的结构类型可以使前轮在运动过程中,外倾角随时变化来减小前轮间距的变化。这样可以延长轮胎的使用寿命,增强了对不同情况路面的应变能力,使轮胎与地面的接触面变大,车轮的工作性能强。前悬架结构模型如图1所示。
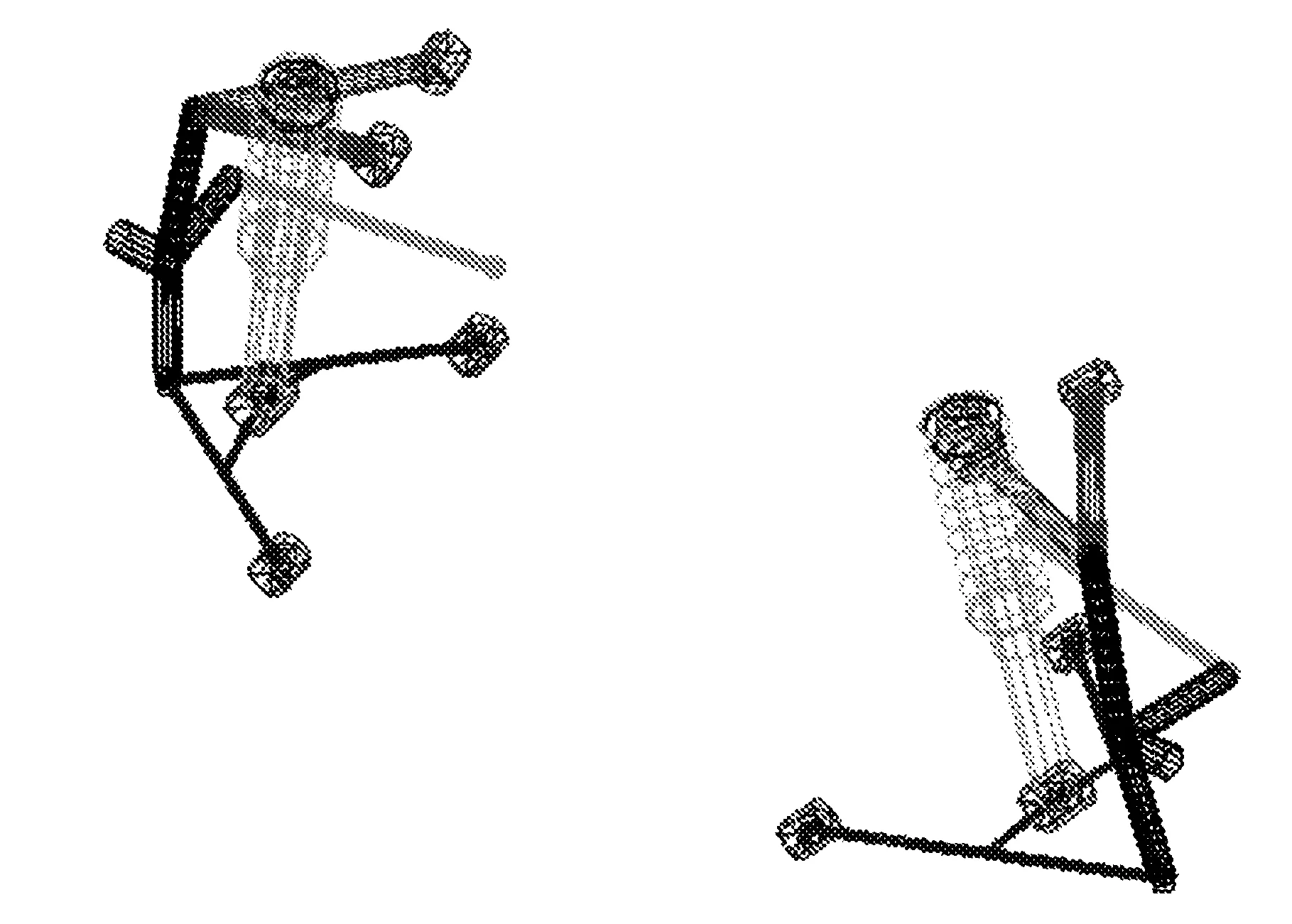
图1 前悬架结构模型
1.2 后悬架模型的建立
该汽车后悬架采用的是多连杆结构,此类型悬架可以对主销后倾角的位置进行调整,极大程度地削减来自路面传来的前后方向力,从而提高了制动与加速的舒适性。在汽车沿直行道路行驶时,能起到良好的保证直行能力的稳定性;在汽车处于制动或转弯过程中,多连杆悬架能使后轮前束为正值,增强了对汽车的操控性能,降低了转向时转向轮的角度幅值。多连杆悬架在受迫运动时,通过连杆对各杆件间连接点(硬点)位置的主动调整来改变车轮状态,时刻保持后轮对地面的抓地力达到最好的状态。由于该悬架自由度的设计比较大,可以针对车辆在运动状态时的前束角和外倾角进行校正,并能使后轮获得一定的转向角度,可以极大提高整车的操控极限,后悬架结构模型如图2所示。

图2 后悬架结构模型
1.3 整车集成模型
利用ADAMS/CAR的组件功能,将所需创建的各结构部件组装,建立整车模型。整车仿真模型主要由前悬架部件、后悬架部件、车身、转向系统、轮胎和动力传动系统模型6个部分构成,如图3所示。
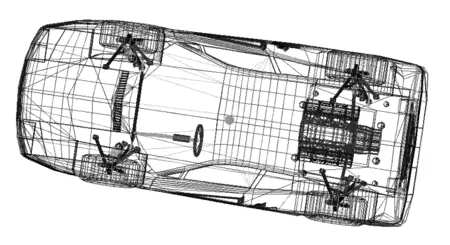
图3 整车仿真模型
车辆模型在虚拟路面上行驶,对行驶状态的控制由驱动器来进行。依靠仿真功能对整车进行仿真可以获得本次实验中所需的特性曲线。
2 ADAMS/INSIGHT实验设计
由于该模型是通过对原有模型的硬点进行修改后获得的所需要的模型,使得模型可能会存在缺陷或不足,实验设计可以对多个参数进行实验分析,帮助寻找出哪些因素的影响最显著,利用优化分析求出该因素参数在取什么值的时候能使测量目标达到最小或最大,其步骤如下:
1)创建状态变量;
2)创建测量函数;
3)创建设计目标变量;
4)进行优化分析;
5)查看优化结果[6]。
选取平衡位置转向节下球铰点C、下控制臂后点A、下控制臂前点B、平衡位置转向节上球铰点F、上控制臂后点D、上控制臂前点E、转向横拉杆内外点(设为N、M)的空间坐标参数作为设计变量:
(1)
规定所选参数的变化范围,受结构设计影响,令所选各参数的变化范围为±15 mm:
(2)
前悬架优化中,前轮位置参数指其前轴、主销轴线在空间上形成的定位参数,有前轮前束角、前轮外倾角、主销后倾角、主销内倾角。选取前轮外倾角(γ)、前轮前束角(B)、主销后倾角(β)为测试目标,硬点参数的变化会影响外倾角、主销后倾角、内倾角。对三者变化量进行分析,目标函数式为:
(3)
经过迭代计算后,选取令三个目标变化量最小的一组数据,忽略不计对目标影响效果较小的设计变量(平衡位置转向节下球铰点C),对其余的设计变量进行优化后的数据调整,最终获得经过优化后的数据,见表1。
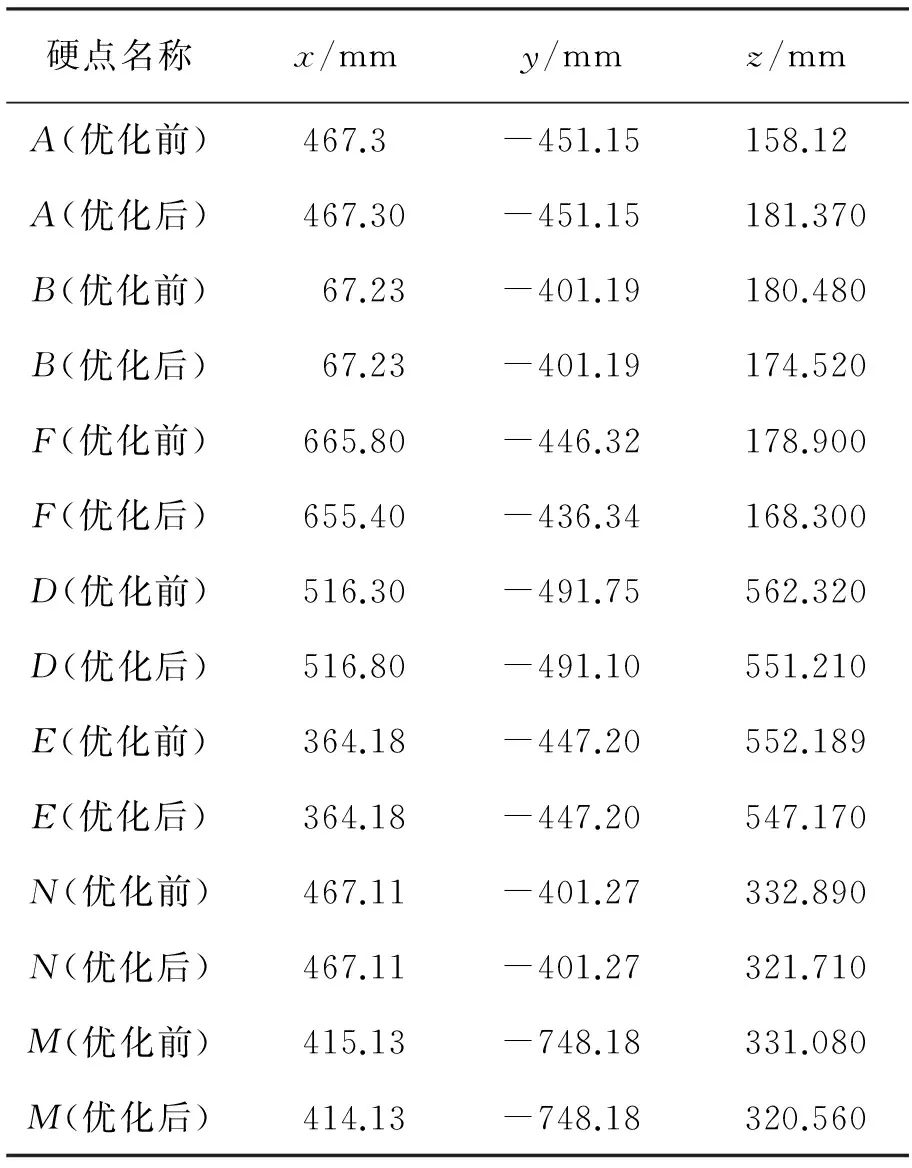
表1 优化后的数据
将优化后的悬架重新进行装配,就可对优化前与优化后的整车进行分析对比。
3 整车的仿真分析
3.1 阶跃转向仿真
通过阶跃转向的仿真实验,可获得汽车的时域过渡特性,有横摆角速度和侧向加速度。实验时,先要保持汽车匀速直线行驶状态,为了消除自由间隙,需要从转向方向缓慢靠向转向盘,随后快速转动转向盘至实验设定的方向转角值,并保持转角值不能发生变动。经过数秒直至所测变量达到新的稳定状态。实验中需要车速、转向盘角度、侧向加速度、横摆角速度等数据。
首先,由进入稳态时的侧向加速度值达到1~3 m/s2来确定获得角阶跃输入实验中方向盘转角大小。在沿直线行驶过程中,当汽车速度保持在其最高车速的70%时,需要在尽可能短的时间内迅速转动方向盘,并停留在预先设定的角度上,在保持数秒车速不变的状态下,直到汽车稳定。选取仿真车车速为100 km/h,方向盘右转,其设定角度为22°,起跃时间为0.4 s,阶跃转向仿真条件如图4所示。

图4 阶跃转向仿真条件
优化前后横摆角速度仿真对比如图5所示。
根据下式可知,优化前超调量为26.9%,优化后超调量为18.8%,说明优化后稳定性能明显优于优化前,稳态响应快,谐振幅小。
(4)
式中:ψ——超调量;
Xmax——横摆角速度最大值;
X0——横摆角速度稳态值。
蛇形仿真在汽车操纵稳定的仿真实验中是一种非常重要的试验方法,因为它能够充分展现出汽车的操纵稳定性能以及乘客在车中的乘坐舒适度。该项仿真实验用于评测车辆在行驶过程中的过渡响应与侧倾稳定性。在蛇形驾驶过程中要预先对方向盘进行转向角的设定,之后再反方向转动方向盘,达到设定角度。由国家标准GB/T6323.1-94规定的蛇形基准设定标桩间距L为30m,基准车速为65km/h,仿真车速依次为40、55、65、75km/h。
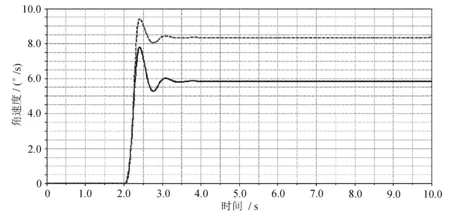
实线为优化前; 虚线为优化后
3.2 蛇形仿真
车速为40 km/h时横摆角速度响应如图6所示。

图6 车速40 km/h时横摆角速度响应
方向盘转角优化前后对比如图7所示。

实线为优化前; 虚线为优化后
由图7可知,优化前后的横摆角速度和方向盘转角的变化趋势大体上是对应的,其中优化前汽车方向盘的转角幅度是38°,优化后汽车方向盘的转角幅度是36°,优化后比优化前减小了5.3%;横摆角速度大体相同。根据国家相关标准规定蛇形仿真实验的评价方法如下[7]:
1)对横摆角峰值的均值r进行评价。平均横摆角速度峰值的评价计分值Nr:
(5)
式中:r60——横摆角速度平均峰值的下限值;
r100——横摆角速度平均峰值的上限值;
r——基准车速下横摆角速度平均峰值的仿真值。
2)对转向盘转角峰值平均值θ进行评价。转向盘转角平均峰值的评价计分值Nθ:
(6)
式中:θ60——转向盘转角平均峰值的下限值;
θ100——转向盘转角平均峰值的上限值;
θ——基准车速下转向盘转角平均峰值的仿真值。
3)蛇形仿真实验的综合评价计分值。蛇形仿真实验的综合评价计分值NS:
(7)
结合国家标准,计算出蛇形仿真实验的评价计分值,优化前NS=97.326,优化后NS=98.391,评分较优化前高。
4 结 语
通过利用ADAMS/CAR模块对整车进行建模仿真,并通过ADAMS/INSIGHT模块对前后悬架进行优化,对悬架的几个定位参数进行分析及修改,在阶跃转向仿真中使超调量由26.9%降低至18.8%,提升了汽车的稳定性。蛇形试验中,评分由97.326升高到98.391,表明该方法可以准确方便地计算汽车悬架的硬点参数,在汽车的前期开发中大量降低了成本及车辆的研发时间,使得生产出的车辆安全又舒适。
[1] 阿达姆.措莫托.汽车行驶性能[M].黄锡朋,解春阳,译.北京:科学普及出版社,1992.
[2] 耶尔森.赖姆帕尔.汽车悬架[M].李旭东,译.北京:机械工业出版社,2013.
[3] 安部正人.汽车的运动与操纵[M].陈幸波,译.北京:机械工业出版社,1998.
[4] 潘筱.五连杆非独立后悬架K & C特性仿真研究[J].机械设计与制造,2013,9(9):79-82.
[5] 彭莫,刁增祥,党潇正.汽车悬架构件的设计计算[M].北京:机械工业出版社,2012.
[6] 周志才.基于ADAMS/Insight的某传动机构参数优化[J].机械工程师,2011,6(6):64-66.
[7] 全国汽车标准化委员会.QC/T480-1999汽车操纵稳定性指标限值与评价方法[S].北京:[s.n.],1999.
ADAMS/CAR based vehicle steering stability simulation and optimization
LI Huicong1,GOU Zhijian2*,REN Minghui3
(1.School of Mechatronic Engineering,Changchun University of Technology,Changchun 130012,China;2.Qianjiang College,Hangzhou Normal University,Hangzhou 310016,China;3.FAW Technology Center,Changchun 130012,China)
Based on multibody dynamics principle,ADAMS/CAR technique is used to build the vehicle model and then optimized with INSIGHT module to improve the suspension hard points. Simulation analysis is carried out on the whole structure. Step steering and serpentine experiments are applied to evaluate the stability of vehicle handling.
ADAMS/CAR; handling and stability; optimization design; steering; pylon course slalom test.
2016-03-09
李慧聪(1989-),男,汉族,河北张家口人,长春工业大学硕士研究生,主要从事数字化制造工程方向研究,E-mail:741088796@qq.com. *通讯作者:勾治践(1958-),男,汉族,吉林长春人,杭州师范大学教授,博士,主要从事数字化制造工程和机械系统动力学方向研究,E-mail:gouzhijian@163.com.
10.15923/j.cnki.cn22-1382/t.2016.5.21
U 463.33
A
1674-1374(2016)05-0516-05
猜你喜欢
军事文摘(2021年18期)2021-12-02
中国特种设备安全(2018年10期)2018-12-18
天津教育·下(2018年9期)2018-07-13
自动化仪表(2017年8期)2017-08-30
中学生数理化·高一版(2017年3期)2017-07-08
金色年华(2017年13期)2017-04-04
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
电力自动化设备(2013年11期)2013-09-18
探测与控制学报(2012年1期)2012-08-27
