
直流调速系统结构框图模型的研究
2016-12-07 06:00:48潘维加
电气自动化 2016年4期
潘维加
(长沙理工大学 电气与信息工程学院,湖南 长沙 410076)
直流调速系统结构框图模型的研究
潘维加
(长沙理工大学 电气与信息工程学院,湖南 长沙 410076)
在查阅关于运动控制系统课程教材及相关参考文献的基础上,仔细研究了直流调速系统的结构框图模型,发现现有规划教材和相关参考文献中关于直流调速系统的结构框图模型普遍存在一些问题。从绘制控制系统结构框图模型的基本原理出发,建立了直流电动机及与其相关的直流调速系统结构框图模型,对专业人员正确理解直流电动机特性和直流调速系统具有一定的参考价值。
直流电动机;直流调速系统;运动控制系统;结构框图;自动控制系统
0 引 言
直流调速技术是既古老又非常成熟的技术,尽管交流调速系统取代直流调速系统已成不争的事实,但是掌握直流调速系统的分析和设计方法仍然是非常必要的,它是分析交流调速系统的基础。它以直流电动机为被控对象,通过功率放大与变换装置、控制器和传感器,实现直流电动机的转速控制。近几年,笔者从事运动控制系统的本科教学任务。在教学过程中,发现该门课程的规划教材[1-6]和相关的文献资料[7-15]中关于直流调速系统结构框图模型存在一些问题,比如:在直流电动机的动态结构框图中,反电动势和转速这一环节的输入与输出之间关系的逆向表示与实际不符,反电动势不是引起转速变化的原因,它是转速变化的结果,另外,电枢电流与反电动势这个环节的输入与输出之间的关系也与实际不符,电枢电流不是产生反电动势的直接原因;再比如:带电流截止负反馈的闭环直流调速系统稳态结构框图中,只有转速反馈回路,并没有电流截止负反馈回路,图中的电流信号是前馈信号,这与教材上所说的电流截止负反馈相矛盾,另外,双闭环直流调速系统的稳态结构框图也存在同样的问题;又比如:双闭环直流调速系统的稳态结构框图中把电流信号画成前馈信号,而其动态结构框图却画成反馈信号,同一个系统,稳态是前馈,动态是反馈,这显然是相互矛盾的。上述问题已存在多年,不像是作者笔误,且具有普遍性。教材多次再版,均未进行修改。作为国内规划教材,长期存在此问题实属罕见。现从控制角度出发,建立直流电动机和直流调速系统结构框图模型,供专业人员参考。
1 直流电动机结构框图模型的建立
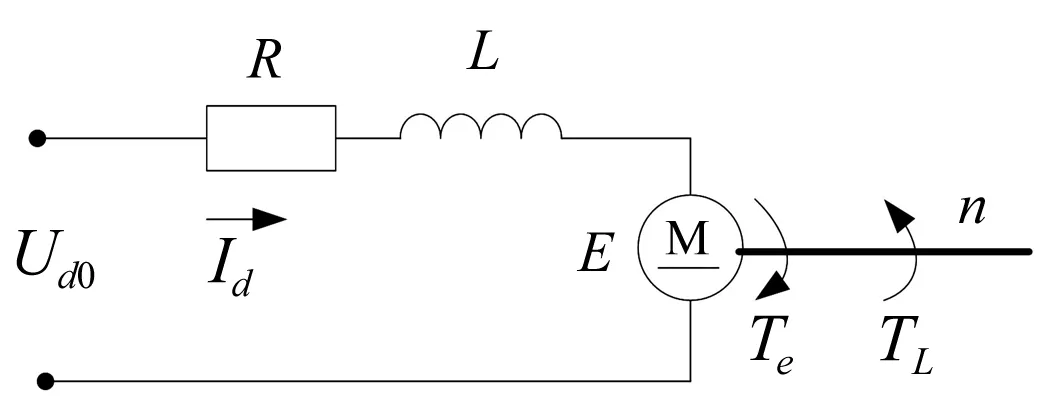
图1 他励直流电动机等效电路
他励直流电动机在额定励磁下的等效电路如图1所示。图中R为电枢回路的总电阻(Ω),L为电枢回路的总电感(H),E为反电动势(V),Udo为施加在电枢回路上的理想空载电压(V),Id为电枢电流(A),n为电动机转速(r/min),Te为电动机电磁转矩(N·m),TL为包括电动机空载转矩在内的负载转矩(N·m)。他励直流电动机各物理量之间的基本关系可以看成是由如下四种典型环节组成的。
1.1 电枢回路环节
该环节的输入量为施加在电枢两端的电压Ud0,输出量为电枢电流Id,根据基尔霍夫电压定律,有:
(1)
(1)式两边进行拉氏变换,并化简为:
(2)
式中K1=1/R;T1=L/R,称为电枢回路的电磁时间常数,其结构框图如图2(a)所示。
1.2 电枢电流与电磁转换环节
该环节的输入量为电枢电流Id,输出量为电磁转矩Te。由电机学原理可知,在额定励磁下,电动机电磁转矩与电枢电流成正比,即:
Te=Cm×Id
(3)
式中Cm为电动机额定励磁下的转矩系数(N·m/A)。其结构框图如图2(b)所示。
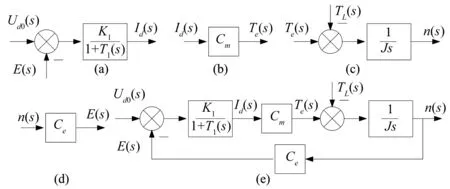
图2 直流电动机动态结构框图
1.3 转矩平衡环节
该环节的输入量为电磁转矩Te,输出量为电动机转速n。根据牛顿运动力学定律,忽略粘性摩擦及弹性转矩,电动机轴上的动力学方程为:
(4)
式中J=GD2/ 375,为电力拖动装置折算到电动机轴上的转动惯量(N·m2)。
(4)式两边进行拉氏变换,并化简为:
(5)
其结构框图如图2(c)所示。
1.4 电动机转速与反电动势环节
该环节的输入量为电动机转速n,输出量为反电动势E。由电机学原理可知,在额定励磁下,电动机的反电动势与转速成正比,即:
E=Ce×n
(6)
式中Ce为电动机反电动势系数(V·min/r)。其结构框图如图2(d)所示。

图4 转速负反馈闭环直流调速系统结构框图
综合(2)、(3)、(5)、(6)式对应的结构框图,可得直流电动机的动态结构框图如图2(e)所示,该结构框图是对现有教材中直流电动机动态结构框图的修改。修改后的结构框图模型,不仅各环节都有明确的物理意义,而且环节之间的连接与实际相符,物理概念清晰,容易理解。


图3 变换后的直流电动机结构框图
2 直流调速系统结构框图模型的建立
2.1 转速负反馈闭环直流调速系统
以采用比例调节器的转速负反馈闭环直流调速系统为例。根据简化后的直流电动机的动态结构框图,可以直接画出转速负反馈闭环直流调速系统的动态结构框图,如图4(a)所示。图中,Kp为比例调节器的比例系数,Ks为电力电子变换器的放大系数,Ts为电力电子变换器的平均失控时间(s),为转速反馈系数(Vmin/r)。该结构框图与现有教材相比,改进之处是直流电动机部分,其它基本相同。

2.2 带电流截止负反馈的闭环直流调速系统
由于要将电枢电流进行反馈,故在绘制系统结构框图时不能采用等效变换后的直流电动机的结构框图,要直接采用未化简的直流电动机的结构框图。带电流截止负反馈的闭环直流调速系统的动态结构框图如图5所示。
图中,Rs为电流反馈的采样电阻,Ucom为比较电压,f(x)为电流负反馈环节的输入输出特性。该系统由电流负反馈(内回路)和转速负反馈(外回路)组成。内回路的主要作用就是防止电枢电流过大。
令s=0可得带电流截止负反馈的闭环直流调速系统的稳态结构框图,如图6所示,其中,电动机转矩平衡环节为典型积分环节,稳态时电磁转矩与负载转矩相等,电动机转速不变,该环节不能用静态放大系数表示,故图中用其输出特性f(t)表示。与现有教材上的相比,该结构框图清晰地将电流负反馈回路(内回路)表示出来,而现有教材却以前馈的形式表示反馈。
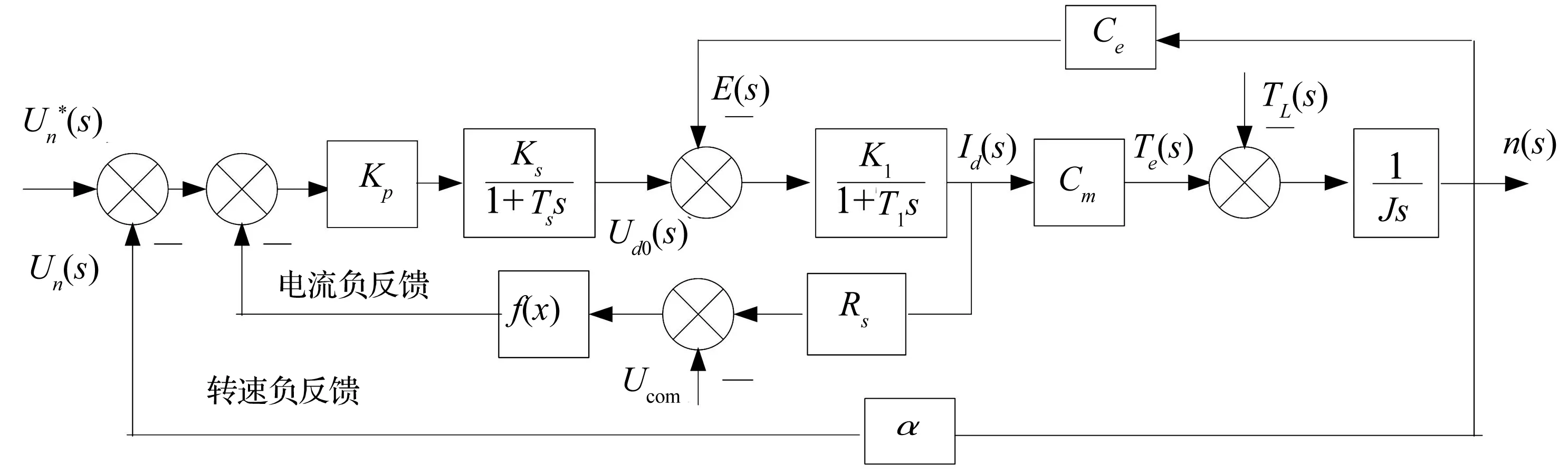
图5 带电流截止负反馈的闭环直流调速系统的动态结构框图
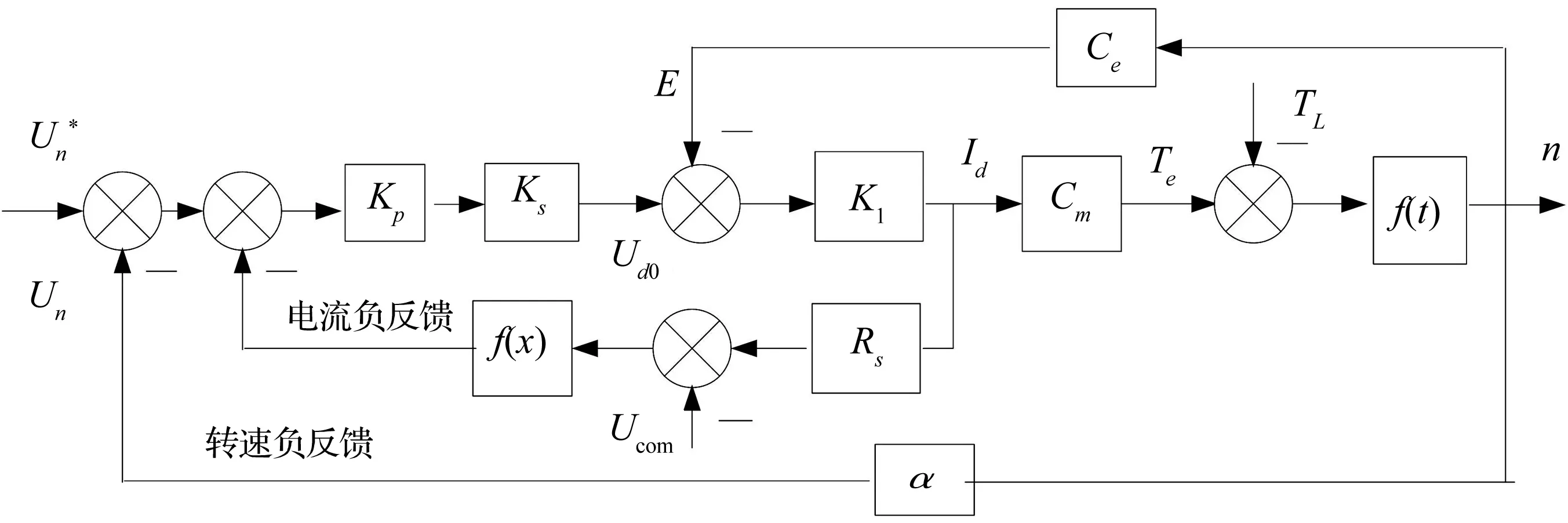
图6 带电流截止负反馈的闭环直流调速系统的稳态结构框图
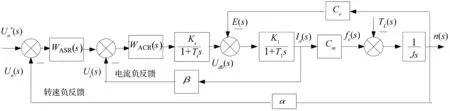
图7 双闭环直流调速系统的动态结构框图
2.3 双闭环直流调速系统
同样,因为要引出电枢电流负反馈信号,所以在绘制其结构框图时,利用未化简的直流电动机结构框图。双闭环直流调速系统的动态结构框图如图7所示。图中,WASR(s)为转速调节器,WACR(s)为电流调节器,β为电流反馈系数。该图与现有教材上的主要区别是直流电动机部分的结构框图模型不同。
令s=0可得双闭环直流调速系统的稳态结构框图,如图8所示。图中,转速调节器ASR和电流调节器ACR均为PI调节器,稳态时其输入偏差为零输出保持不变,不能用静态放大系数表示,故画出其输出特性,以表示比例积分作用。该图与现有教材上的主要区别是:该图非常清楚的显示了电流负反馈回路(内回路),而现有教材却将电流负反馈回路画成电流前馈通道。
3 结束语
控制系统结构框图是描述控制系统比较直观的方法之一。为了使学生或专业人员更好地理解直流调速系统的控制机理,笔者对现有规划教材上的直流调速系统结构框图模型进行了修改。修改后的结构框图模型,符合实际情况,物理概念清晰,容易理解。

图8 双闭环直流调速系统的稳态结构框图
[1] 陈伯时.电力拖动自动控制系统[M].2版.北京:机械工业出版社,1992.
[2] 陈伯时.电力拖动自动控制系统[M].3版.北京:机械工业出版社,2003.
[3] 阮毅,陈维钧.运动控制系统[M].北京:清华大学出版社,2006.
[4] 阮毅,陈伯时.电力拖动自动控制系统—运动控制系统[M].4版.北京:机械工业出版社,2009.
[5] 张崇巍,李汉强.运动控制系统[M].武汉:武汉理工大学出版社,2002.
[6] 贺昱曜.运动控制系统[M].西安:西安电子科技大学出版社,2009.
[7] 刘征.直流电动机调速控制系统的仿真研究[J].计算机仿真,2013,30(4):390-393.
[8] 刘陆.基于MATLAB直流电动机控制系统的建模与仿真[J].兰州工业学院学报,2014,21(1):14-17.
[9] 郭新军,陈素霞.直流电动机时变参数在线辨识方法[J].工矿自动化,2014,40(5):59-61.
[10] 杨祖元,杨华芬.双闭环直流调速系统模糊PID控制研究[J].计算机应用研究,2011,28(3):921-923.
[11] 王松林,谢顺依,王鼎.直流调速系统模糊复合控制的建模与仿真[J].船舰电子工程,2010,30(9):117-119,171.
[12] 缪仲翠,党建武,张鑫,等.PSO优化分数阶 PIλ控制的双闭环直流调速控制[J].计算机工程与应用,2015,51(7):252-257.
[13] 陈冲,胡国文,基于神经网络控制的直流调速系统仿真与分析[J].计算机仿真,2013,30(4),356-360.
[14] 张海明,缪仲翠,赵静琼.双闭环直流调速系统的分数阶PIλ控制[J].科学技术与工程,2015,15(8):85-89,98.
[15] 刘翔,曹萍,陈致远,等.直流调速系统与MATLAB仿真[J].电气传动,2013,43(4):12-16.
Research on the Block Diagram of the DC Speed Regulating Systems
Pan Weijia
(College of Electrical and Information Engineering,Changsha University of Science and Technology, Changsha Hunan 410076, China)
On the basis of consulting teaching materials and
concerning motion control systems, we study in detail the block diagram model of the DC speed regulating system and find that there are some problems with block diagrams concerning the DC speed regulating system in existing teaching materials about planning and related references. Starting from the basic principle for plotting the block diagram of the control system, we establish models for block diagrams for the DC motor as well as the related DC speed regulating system, which have certain reference value for professionals in their correct understanding of the characteristics of the DC motor and DC speed regulating system.
DC motor; DC speed regulating system;motion control system; block diagram; automatic control system
10.3969/j.issn.1000-3886.2016.04.021
TM921.5
A
1000-3886(2016)04-0065-03
潘维加(1959-),男,吉林人,教授,研究方向:电气传动与控制技术。
定稿日期: 2015-12-18
猜你喜欢
火力与指挥控制(2022年5期)2022-07-25 03:50:10
四川大学学报(自然科学版)(2021年1期)2021-01-26 07:39:14
弹箭与制导学报(2020年1期)2020-07-09 10:52:00
汽车维修技师(2019年7期)2020-01-16 04:33:04
弹箭与制导学报(2019年6期)2019-06-24 08:40:20
电子制作(2019年23期)2019-02-23 13:21:36
汽车维修技师(2018年11期)2018-05-11 02:38:32
中学生数理化·高一版(2017年1期)2017-04-25 13:22:35
河北软件职业技术学院学报(2015年3期)2016-01-01 07:29:50
新高考·高一物理(2014年4期)2014-09-17 06:52:02
