
Rossler系统的混沌控制
2016-12-07 06:04:07马莉
电气自动化 2016年4期
马莉
(兰州石化职业技术学院 电子电气工程系,甘肃 兰州 730060)
Rossler系统的混沌控制
马莉
(兰州石化职业技术学院 电子电气工程系,甘肃 兰州 730060)
根据Rossler系统的动力学方程,数值仿真了系统随自身参数变化的全局分岔图,分析了参数变化引起系统动力学行为的变化。针对系统混沌状态,分别用自适应控制法和 控制法两种方法对系统进行控制,仿真结果显示:两种控制法均能将系统控制在稳定的周期轨道。对比了两种控制法对系统控制的结果,在自适应控制中,随着控制参数 逐步减小,系统由单周期运动经倍化分岔为双周期运动,再经倍化分岔序列最终通向混沌,动力学行为规则,对应控制参数选择区域连续;在 控制中,系统由混沌状态转变为三周期运动,随着控制参数逐步增大,周期运动发生倍化分岔,再经倍化分岔序列通向混沌,系统动力学行为丰富,对应控制参数选择区域范围明确。为Rossler系统的动力学行为研究和混沌控制提供了理论支持,为Rossler系统在工程领域的应用及控制提供了参数选择区域,为其它系统的混沌控制及动力学行为研究提供了经验和方法。
Rossler系统;动力学行为;周期运动;分岔;混沌;混沌控制
0 引 言

1 Rossler系统
1.1 系统动力学模型
Rossler系统的动力学方程为:

(1)
这是三变量非线性微分方程组,a,b,c为参数。
1.2 系统混沌状态

图1 系统随参数变化的全局分岔图
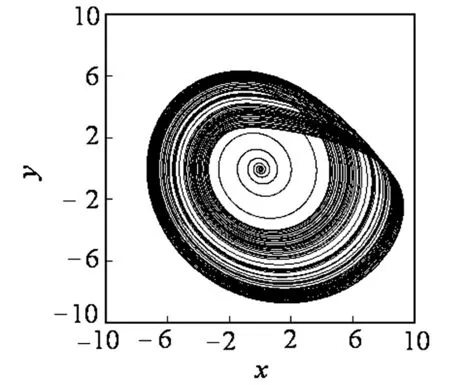
图2 x-y混沌吸引子

图3 y-z混沌吸引子
选取系统参数,当a=0.2,b=0.2,c=4.6时,系统有两个平衡点S1=(0.003, -0.02, 0.02),S2=(10.00, -66.65, 66.65),其中S1是不稳定的焦点,S2是不稳定的中心点,此时系统处于混沌状态。对系统用变步长Runge-Kutta法进行数值仿真,取平衡点(0, 0, 0),选取系统的初始值(0.003, 0.02, 0.02),可得系统随自身参数变化的全局分岔图,如图1所示。在图1中,随着系统参数a的增大,系统发生倍化分岔,当系统参数a不断增大时,系统发生倍化分岔序列,最终通向混沌状态。图2、图3给出了系统处在混沌状态的相图。
2 混沌控制
2.1 自适应控制
自适应控制算法旨在设计一状态反馈控制器u,使得所构成的闭环系统稳定。显然,简单的状态反馈控制器应该是控制器u仅仅是状态X的线性函数,即u=-kX,其中k为反馈增益。另外,如果控制器u仅仅是状态X中某一变量的函数,即u可表述为u=-kx1,或u=-kx2,或u=-kx3的形式,则控制器的结构会更加简单。为不失一般性,本文只对状态X中的变量y施加控制作用,且控制器的结构为u=-ky。首先构造如下的Lyapunov函数:
V=(x2+y2+z2)
(2)
对V求导,则:
(3)
若k>c,则P(k)正定,故:

(4)
其中λmin(P(k))为矩阵P(k)的最小特征值。又因为V=‖x‖2,则:
V≤-λmin(P(k))V
(5)
所以:
V(t)≤V(0)exp(-λmin(P(t)))
(6)
其中V(0)为Lyapunov函数的初始值。因V(0)是有界的,所以当反馈增益k>c时,状态X指数趋于稳定。选择变量y施加控制作用,且控制器的结构为u=-ky。于是受控的Rossler混沌系统可写为:

(7)

图4 系统关于控制参数k的全局分岔图
通过数值仿真,得到系统在受控后随控制参数k变化的全局分岔图如图4所示。在图4中,随着控制参数k的减小,系统由单周期运动经倍化分岔为双周期运动,随着控制参数k的进一步减小,系统再次发生倍化分岔,最终由倍化分岔序列通向混沌。当控制参数k=0.08,系统处于单周期运动轨道,图5、图6为系统处在单周期状态时的相图,图7为系统在单周期时的时间历程图;减小控制参数,当k=0.04时,系统处于周期二运动轨道,图8、图9为系统处在周期二运动状态时的相图,图10为系统在周期二时的时间历程图;进一步减小控制参数,当k=0.025时,系统处于周期四运动轨道,图11、图12为系统在周期四运动状态时的相图,图13为系统在周期四时的时间历程图。由此可见,自适应控制算法能将系统控制在单周期、多周期运动轨道上。
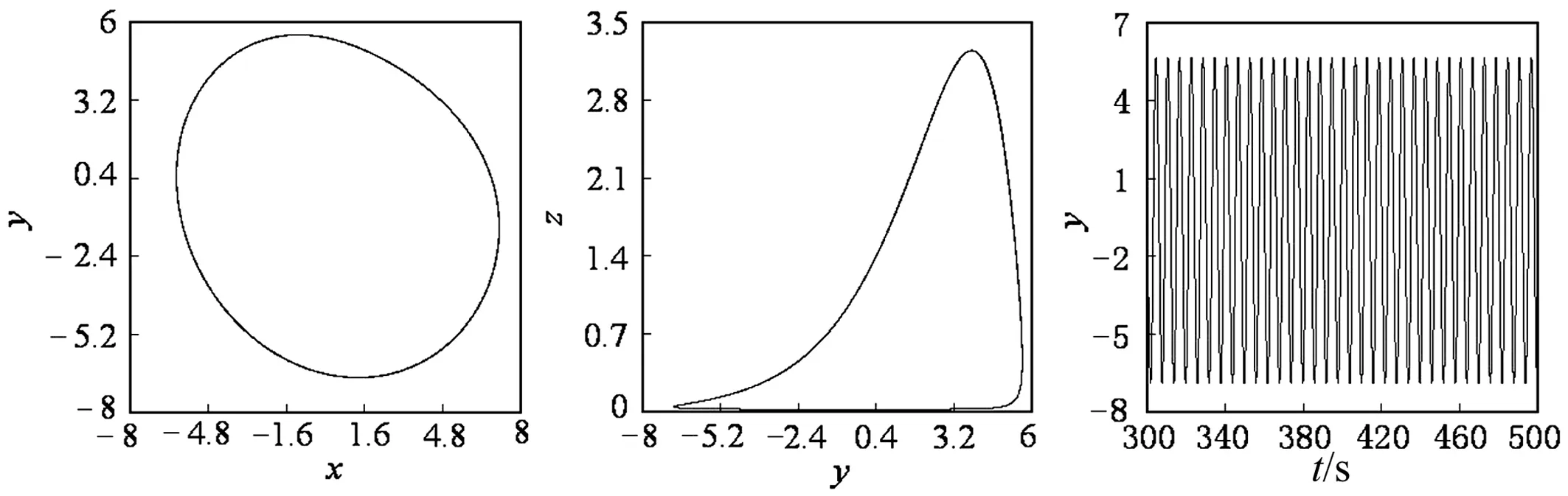
图5 单周期x-y相图 图6 单周期y-z相图 图7 单周期时间历程图

图8 周期二x-y相图 图9 周期二y-z相图 图10 周期二轨道时间历程图

图11 周期四x-y相图 图12 周期四y-z相图 图13 周期四轨道时间历程图

考虑如下定义的n维非线性混沌系统

y=cx
(8)
其中F为非线性光滑向量函数,X为系统的状态X=[x1,x2, …,xn]T,y为系统的输出,c为1×n的常数矩阵。设系统的非线性反馈控制器为:
(9)
其中K为反馈增益矩阵。将该非线性反馈控制器负反馈加到混沌动力系统中,则受控系统为
(10)
这样形成的非线性控制器简单且只需要稍微改变参数,相对小的反馈增益,就能够将混沌运动控制到各种规则的运动。
在式(1)中加入负反馈变量,就可以得到受控的方程如下:

(11)

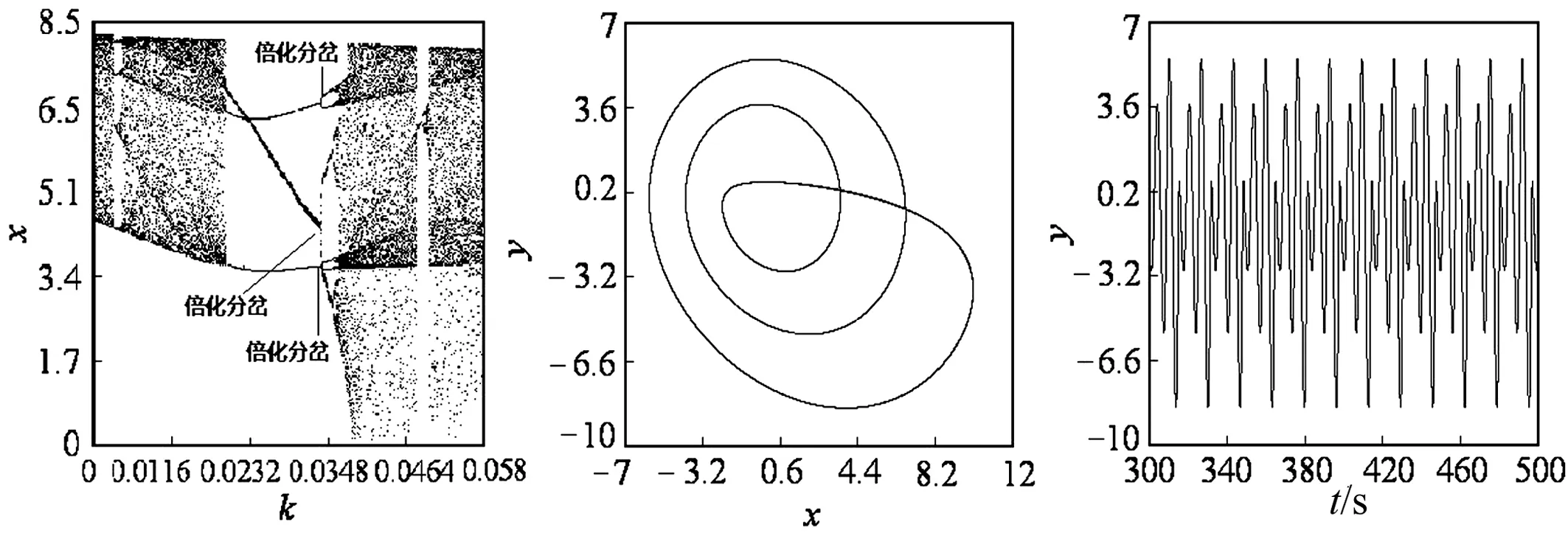
图14 全局分岔图 图15 周期三x-y相图 图16 周期三轨道时间历程图
3 结束语
[1] 马明,郑永爱,胡冯仪,等.Rossler系统的最小时间同步[J].动力学与控制学报, 2008,6(3):249-253.
[2] 吴先用,万钧力.Rossler系统与统一混沌系统的异结构同步[J].系统工程与电子技术,2008,30(4):715-718.
[3] 李佳.Rossler混沌系统间的非线性耦合同步[J].哈尔滨师范大学自然科学学报, 2013, 29(5):22-24.
[4] 邓玥,王光义,袁方.一种新的Rossler 混沌序列图像加密算法[J].杭州电子科技大学学报,2011, 31(5):9-12.
[5] 陈彭年,秦化淑.ROSSLER系统平衡点集的镇定[J].系统科学与数学,2010,30(6):869-876.
[6] FABIO SCALCO DIAS,LUIS FERNANDO MELLO,JIANGANG ZHANG.Nonlinear analysis in a Lorenz-like system[J]. Nonlinear Analysis: Real World Applications,2010,(11):3491-3500.
[7] 尤晓玲. Chen 式系统的动力学行为研究及混沌抑制[J].电气自动化, 2014, 36(1):21-23.
Chaos Control of Rossler System
Ma Li
(Lanzhou Petrochemical College of Vocational Technology,Lanzhou Gansu 730060,China)
According to the dynamic equation of Rossler system, the global bifurcation diagram of the system that changes with its parameters is simulated while the change of the system dynamic behavior is analyzed. In view of the chaotic state of the system, adaptive control method and control method are used respectively to control the system. The simulation results show that both control methods can control the system in a stable periodic orbit. The results of two control methods are compared. In adaptive control, along with gradually reduced control parameter , the system is initiated from a single periodic motion to double periodic motion through double bifurcation and then leads to chaotic & dynamic behavior rule via the sequence of doubling bifurcation, corresponding to continuous control parameter selection region. In control method, the system is transformed from chaotic state to 3-periodic motion. Along with gradually increased control parameter , the periodic motion generates double bifurcation and then leads to chaos via the sequence of doubling bifurcation with very rich system dynamic behavior corresponding to clear range for control parameter selection. This paper provides theoretical support for further study of the dynamical behavior and the chaos control of the Rossler system, parameter selection region for application and control of Rossler system in the engineering field and the experience and methods for the study of chaos control and dynamic behavior in other systems.
Rossler system; dynamic behavior; periodic motion; bifurcation; chaos; chaos control
兰州石化职业技术学院教育教学研究课题项目(JY2014-26);兰州石化职业技术学院科技教研项目(KJ2015-12)
10.3969/j.issn.1000-3886.2016.04.009
O322
A
1000-3886(2016)04-0027-03
马莉(1982-),女,甘肃永昌人,讲师,硕士,2008年毕业于兰州交通大学,获硕士学位,主要从事非线性系统动力学行为分析与控制及过程自动化相关领域的科研及教学工作。
定稿日期: 2016-01-14
猜你喜欢
党员文摘(2022年14期)2022-08-06 07:19:22
党员文摘(2022年7期)2022-04-28 08:57:58
飞控与探测(2022年6期)2022-03-20 02:16:14
党员文摘(2022年1期)2022-02-14 06:09:00
党员文摘(2022年3期)2022-02-12 10:38:14
黄河之声(2021年8期)2021-07-23 03:34:32
中国石油石化(2021年10期)2021-07-16 07:31:28
当代音乐(2020年10期)2020-10-26 18:34:52
力学学报(2020年4期)2020-08-11 02:32:12
学生天地(2020年19期)2020-06-01 02:11:36
