
基于物联网的远程实验系统
2016-12-06 10:25高慧敏吴晨曦
实验室研究与探索 2016年5期
吕 强, 高慧敏, 吴晨曦
(杭州电子科技大学 自动化学院,浙江 杭州 310018)
基于物联网的远程实验系统
吕 强, 高慧敏, 吴晨曦
(杭州电子科技大学 自动化学院,浙江 杭州 310018)

当前实验装置的可利用数量少与所需训练的学生人数多的矛盾,以及实验装置利用时间短与学生课余时间长的矛盾,使得实验教学的实际效果不理想。针对上述问题,在物联网技术的基础上,提出了一种远程实验教学系统,通过远程登录、时间片分配、虚拟仿真、模式切换、物理实验,实时状态监控、数据采集等现代信息技术,使学生得到充分的动手训练,进而解决上述问题。以“微型机器人与C51应用”课程实验为例,阐述了远程实验系统的特点、系统的架构和功能,介绍了实验系统的技术实现方式,给出了实验系统的应用模式。
远程实验; 实验教学; 虚拟仿真; 物联网
0 引 言
现代信息技术的快速发展,已经极大地促进了传统教学模式的转变[1]。各个高校都已建成了数字化校园,并在此基础上,采用各种信息技术手段提高教学效果,如:Blackboard网络学习平台[2],ATutor网络学习管理平台等网络教学平台进行辅助教学[3]。实验教学作为现代教学的重要组成部分,主要目的是让学生能够通过实际的动手操作来更好地理解课堂上所讲的知识,从而做到理论联系实际提高教学效果[4]。但是,由于实验装置的成本问题以及学生选课人数的不确定性,实验装置不会购置很多,造成在规定的时间内,大部分的同学没有获得充足的时间进行操作[5]。在另一方面,由于实验室的封闭式管理使得实验装置在课余时间处于闲置状态,尽管学生们有很多的课后学习时间,但却不能操作实验装置,也就没有得到充分的时间进行动手训练,对于课程知识的理解仍然停留在理论阶段和初浅的操作阶段,使得教学效果没有得到明显的改善[6]。为解决实验教学中出现的问题和矛盾,现代信息技术和各种信息化平台的出现和发展,提供了改变实验教学模式的机遇[7]。本文将以“微型机器人与C51应用”课程为例,对基于物联网的远程实验系统进行研究。
1 传统的实验教学方式
实验教学的主要目的在于通过实验操作,让学生更深刻地了解课堂上所讲的知识[8]。而实验学习主要是通过给定实验任务,操作实验装置,观察实验现象,获取实验数据,采用图像和表格的方式展现实验结果,进而完成实验任务。当前的教学方式是教师讲、学生听,学生操作,教师监督。教学模式是在一个固定的时间内,将教学班级的学生分成多个小组,根据实验装置的数量,通常由4或5名学生组成一个小组共用一台实验装置,如果实验装置数量有限,则可能由10名左右学生组成一个小组[9]。
例如:在“微型机器人与C51应用”这门课上,我系共有20台微型机器人,但在2014年所选这门课程的学生人数一个班级是47人,另一个班级是70人。结果就是对于第一个班级平均2-3人共用1台微型机器人,而另一个班级平均4人共用1台微型机器人。每次上课为2个课时,其中一个课时为理论知识的讲解,另一个课时是给定任务动手实验。在同样的操作时间范围内,对于4人1组的班级,大部分同学没有足够的时间进行练习。另外,由于训练时间短,很多同学没有能够掌握微型机器人的操作技巧,常常带电插拔使程序下载线损坏,随意的调节微型机器人电机的零点,导致电机损坏等等,增加了实验装置的管理和维护成本[10]。
2 基于物联网的远程实验教学
在“微型机器人与C51应用”这门课程上实现远程实验教学,主要是指在校园网环境下,学生可以利用课余的时间,在没有教师的监督下,而仅仅通过信息系统的自动管理功能,根据学号和姓名登录,完成微型机器人的远程控制实验。例如:在规定的时间片内,学生首先根据课程所讲的知识,自己设定任务,完成程序的编写,然后将所写的任务程序与服务器端的系统服务通信,系统首先在虚拟的实验环境下进行测试,从而让学生了解程序运行的结果,查看虚拟实验返回的数据和图像,验证虚拟实验是否成功。如果测试成功,得到系统的认可和学生的认可后,则系统能根据学生的要求切换到物理实验模式,简单地修改程序配置文件的地址,即可平滑地将所写程序与物理实验系统中的服务通信,进而控制微型机器人,实时观测实验测试的结果,接受实验数据,并能动态地改变参数的设置,从而可以更深刻地了解机器人的各种控制功能,也对课堂所讲的机器人控制方法有了更深的理解。因此,可以看出,基于物联网的远程实验系统并不是取代传统的实验教学模式,而是利用信息化手段对传统实验教学模式的有益补充,并具有以下特点:
(1)采用课内时间与课余时间相结合的方式,使学生得到充分的训练。在“微型机器人与C51应用”这门课的正常教学计划中,每次上课2个学时,第一个学时讲解所需掌握的基本知识,第二个学时由学生分组进行实验操作,完成教师指定的任务,如:轨迹跟踪,避障,模拟交通系统等等。由于训练时间短,正常的实验教学时间不能够满足学生的基本要求。因此,学生可以利用自己的课余时间,采用远程实验系统,通过物联网,控制微型机器人,完成课堂上的任务要求,也可以自己设定任务,观测和记录实验的结果。
(2)灵活的时间安排,适应不同选课情况下的学生。每个学生的选课安排是不同的,这也就造成了每个学生的课余时间不同。缺点就是不能够统一安排,增加实验时间。但好处是,不会出现同一时间段,学生们大量进行远程实验操作,学生的时间安排也更加灵活。因此,也就适应不同选课情况的学生。另外,每次学生登录进行实验时,仅给出45 min时间片供学生使用(在没有后续学生等待的情况,系统可以自动增加实验时间安排)。这就促使学生需要抓紧时间,强化自己的训练,完成自己的程序操作。
(3)虚拟实验操作可降低实验装置的维护成本。在远程实验过程中,一个重要的环节是,学生编写的程序需要在虚拟仿真环境中运行,即在虚拟环境中控制微型机器人操作,验证程序的正确性。正确性主要包含2个含义:一是程序能够正常地运行,而不会对微型机器人产生损坏作用;另一个是程序能够实现学生自己设定的任务。远程实验系统主要对程序是否会对微型机器人产生损坏作用进行判断,如:机器人是否会运动到边界外,加载程序是否符合机器人的正常逻辑操作等等。如果程序正确性得到验证,则可以直接加载到真实的微型机器人上,完成给定的任务操作。因此,虚拟实验的方式有效地降低了实验装置的维护成本。
(4)在学习中发现问题,寻找解决问题的方案。远程实验系统的工作环境是在物联网中,学生在实验过程中会遇见一些控制问题,从而没有完成设定的任务,这就促使学生思考问题产生的来源,通过查询书籍或通过网络寻找解决问题的方案。然后,更改自己的任务解决方案,重新开始实验。同时通过反复的实验操作,观察实验获得数据和实验结果,非常利于对课堂所讲知识的理解和掌握,也能够提高学生的学习兴趣,调动学生学习的积极性,便于参加其他科研活动,提高学生视野和对问题解决方式的见解等等。
3 远程实验系统框架设计和技术实现
远程实验系统依托校园网络,将客户端、管理端以及实验系统服务连接起来。在客户端,学生可以登录实验系统服务器,并建立自己的服务程序。在管理端,管理人员可以设定学生的权限、设定系统工作的时间段以及分配学生使用的时间。实验系统服务器是远程实验系统的核心,主要完成虚拟仿真及微型机器人的实际控制。数据中心主要用来存储学生的登录信息和实验系统的工作状态。
图1显示的是实验系统的设备连接图,这是远程实验系统工作的核心部分,主要包括:控制节点和无线节点、实验场地和微型机器人以及摄像机。控制节点通过无线节点发出运动指令,微型机器人接受并执行指令,由摄像机采集微型机器人运动图像,并传回控制节点。具体来说:
(1)身份验证和服务提供。实验系统服务器首先提供远程登录学生的身份认证,主要采用课程学习的学生姓名和学号,如果认证通过,则提供控制节点运行地址及在该节点中运行的系统服务,包括仿真系统服务地址和物理系统服务地址,并分配用户服务链接时间[11]。
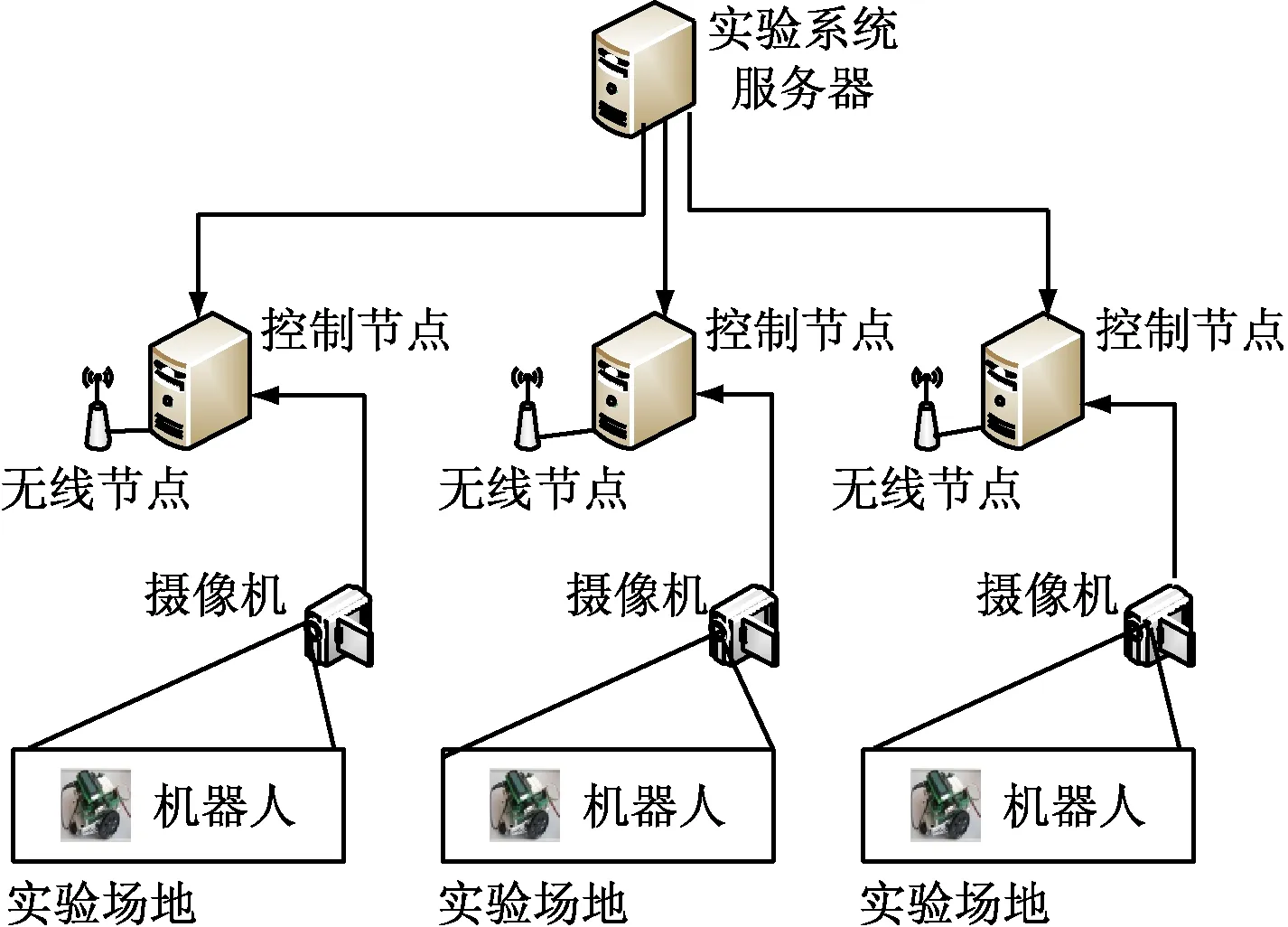
图1 实验系统设备连接图
(2)虚拟仿真和物理控制。在控制节点中,不但要运行虚拟仿真服务,也要运行实际微型机器人控制服务,由于所有服务采用的统一定义模型,使得用户可以在客户端自己编写任务程序(服务),并用任务服务根据实验服务器给出的控制节点地址,和在该节点中运行的系统服务通信,从而实现客户程序的加载。在虚拟仿真环境中,学生编写的服务在实现自己的功能任务时,还需要调用控制节点中的图像服务,该服务可以把仿真环境的图像返回到客户端,便于学生动态观察微型机器人的仿真运行情况,如果在仿真运行中,故障服务没有返回错误值的话,则将在控制节点中运行的物理系统服务地址告诉学生。在物理实现环境中,学生编写的服务无需更改代码,仅在XML文件中把给出的物理系统服务地址替换仿真系统服务运行的地址,然后就可以动态观察实际的微型机器人的运行情况。
(3)微型机器人的执行和运动监控。微型机器人的主要控制器不具有很强的运算能力,所以对于微型机器人主要接收简单的控制指令,如:两个轮子的电机控制信号。并且反馈当前的状态信息,如:红外检测距离。微型机器人的运动速度和位置主要通过场地的监视器获取的运动图像由服务器进行评估,此外,监视器也将微型机器人的运行情况报告给控制节点中的图像服务,这样就可以通过访问图像服务获取微型机器人的实时运动信息。
为了实现上述功能,远程实验系统的管控软件由:仿真系统服务模块、物理系统服务模块、数据管理模块、登录管理模块、以及系统管理模块等5个模块组成,如图2所示。
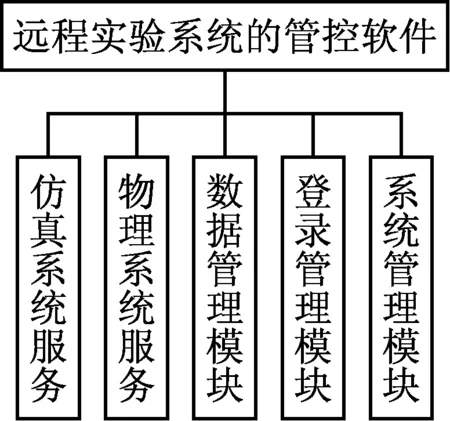
图2 管控软件功能模块
(1)仿真系统服务模块和物理系统服务模块。这两个服务模块都是基于Microsoft Robotics Studio 中的DSS服务体系建立的。隶属于这两个模块的服务,无论是系统服务还是自定义的服务,都要准守相同的服务结构定义,如图3所示。其中Service Identifier 是服务标识符而Contract Identifier 是该服务类型具体事例的标示符,State是服务的状态,Main Port是服务接收事件的端口,Service Handlers是事件处理接口,Partners是能够和该服务通信的其它服务标识符,Notifications是该服务返回信息的端口。在仿真系统服务模块和物理系统服务模块都运行在控制节点中,但具体的通信端口不同,因此,每个模块运行的具体地址也就不同,根据地址就可以确定是访问仿真系统服务模块中的服务还是物理系统服务模块的服务。根据服务的定义,在客户端可以开发的服务例子如图4所示。在图4左半部分,输入系统给出的地址和端口,可以列出当前系统中的活动服务,建立和服务活动的通信关系,就可以控制微型机器人运动,图4的右半部分显示机器人的运动轨迹。

图3 系统服务结构
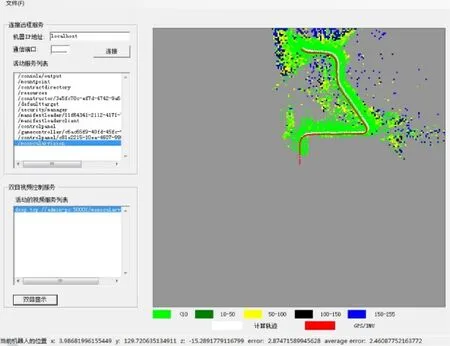
图4 具体的服务实例
(2)数据管理模块。数据管理模块的主要功能是维护数据库的操作。如:上课学生的基本信息,登录信息,实验时间和权限设定等等。通过数据管理模块,管理人员可以获得统计数据,从而了解系统的使用情况,对于制定新的管理计划及完善远程实验系统提供数据支撑[12]。
(3)登录管理模块。登录管理模块的主要功能是就是根据学生登录的信息调用数据管理模块获得相应学生的数据,在匹配成功后,根据当前控制节点的分配情况,给出该学生可以调用的仿真系统服务地址,这样学生就可以在其自定义服务的配置文件XML中,放入仿真系统服务地址,然后编译自己的服务就可以建立仿真系统服务模块的通信链接,通过调用仿真系统中的服务,实现自己设定的任务。相似的,如果自己的服务安全性得到保证,也可以同样地调用物理系统中的服务,完成物理实验。
(4)系统管理模块。系统管理模块的主要功能是统一协调其它模块,包括开启仿真系统服务,物理系统服务,设定相应工作地址,并且存入到数据库中。调用数据管理模块完成数据的操作,控制登录管理模块完成系统开放时间的设定等等。
4 远程实验系统的应用模式
远程实验系统采用本地管理和远程登录管理相结合的管理模式[13]。本地管理主要在于实验场地的维护,微型机器人系统的维护,服务器及数据库的维护,包括日常的系统初始化,设备调试、突发情况处理等等[14]。远程登录管理主要是实验管理人员通过网络管理终端设定学生的权限,统计学生使用系统的次数和频率,了解系统的负荷并合理的设置时间片,以及根据课程的时间安排设定系统使用的时间段[15]。因此,实验室管理人员1名负责远程实验系统的本地管理,而任课教师负责远程登录管理[16]。应用模式主要包括:①通过校园网,使用姓名和学号的方式登录远程实验系统,这样就可以建立服务器和客户端的安全链接,容许学生编写的程序加载到服务器中。②远程实验系统采用的是Windows的CCR/DSS技术,在安全链接的情况下,允许学生在客户端建立的服务(即实现操作的功能命令集合),并调用系统服务,通过消息/事件方式,给服务器中虚拟实验环境中的微型机器人发布控制事件。③虚拟环境中的微型机器人将根据接收到的事件,执行任务操作,并返回消息到客户端服务程序,告诉客户端事件是否得到正确的执行,同时可视化界面,也使学生能够实时查看自己建立的服务使用情况。④如果服务正常使用而不会使虚拟环境下的微型机器人产生危险动作,则系统授权该服务可以控制实际场地的微型机器人,虚拟模式可以切换到物理模式。⑤系统可以将学生建立的服务程序链接到真实微型机器人的控制服务节点中,这样该服务就可以控制实际微型机器人运动,客户端也可以实时查看运动情况,收集数据并理解课程上所讲述的基本知识。⑥定期维护,由于使用量大和网络的不可确定因素,远程实验系统需要在每个月末,维护一次,用来维修和处理系统的错误,统计学生的使用情况。
5 结 语
基于物联网的远程实验系统是在“微型机器人与C51应用”多年教学的基础上,不断总结经验和学生反馈,以及日益增加维护成本的压力下研发的。该系统能够利用现代的信息化技术,在学校已有的网络和教学平台的基础上,实现学生的远程实验,解决了当前教学实验中面临的问题。不但可使学生能够更好地理解课堂上讲授的知识,增强了动手能力,而且也调动了学生的积极性,对其他课程的学习也起到了重要的帮助作用,促使学生学习新的知识,同时降低了实验装置的维护成本。
[1] 刘秋华, 陈 洁, 沈建红. 校企融合创建电力市场营销专业教学平台[J]. 中国大学教学, 2013(9):53-55.
[2] 王润兰, 程志娜, 刘纪平. 基于Blackboard平台的网络探究学习实验研究[J]. 现代教育技术, 2014,24(9):101-106.
[3] 房汉雄, 穆伟斌, 齐 迹, 等. 移动终端实验教学平台设计与应用[J]. 实验技术与管理, 2014, 31(8): 103-105.
[4] 黄 琰, 蒋 玲, 黄 磊. 翻转课堂在“现代教育技术”实验教学中的应用研究[J]. 中国电化教育, 2014(327):110-115.
[5] 余建潮. 依托实验教学示范中心加强学生实验能力的培养[J]. 实验技术与管理, 2013, 30(3):117-129.
[6] 张剑荣. 构建研究型实验教学平台实施研究性实验教学[J]. 中国大学教学, 2014(7):84-87.
[7] 王晓迪. 虚拟仿真实验教学中心建设中八项关系的理解与探讨[J]. 实验技术与管理, 2014,31(8):9-11.
[8] 许 陵, 冉新义, 陈梅芬. 基于生物信号的远程学习过程监控系统研究[J]. 现代远程教育研究, 2014(5):104-112.
[9] 孙进康. 基于物联网的多媒体教室集成管控系统研究[J]. 现代教育技术, 2014, 24(7):113-119.
[10] 张一春, 马青玉. 打造智能化、信息化、人本化的多媒体教学环境[J]. 现代教育技术, 2011, 21(9):71-74.
[11] 宋国利, 盖功琪, 苏冬妹. 开发式实验教学模式的研究与实践[J]. 实验室研究与探索, 2010, 29(2): 91-93.
[12] 林青松. 基于翻转课堂的“现代教育技术”实验课程设计[J]. 实验室研究与探索, 2014, 33(1): 194-198.
[13] 王卫国. 虚拟仿真实验教学中心建设思考与建议[J]. 实验室研究与探索, 2013, 32(12): 5-8.
[14] 王荣芝, 杨 雪, 于洪涛. 网络虚拟实验的交互设计[J]. 现代远距离教育, 2008(2): 63-64.
[15] 王 姣, 张学军. 虚拟实验与真实实验的比较研究[J]. 中国远程教育, 2013(9): 78-82.
[16] 王济军, 修永富. 移动学习培养大学生跨文化交际能力的实验研究[J]. 电化教育研究, 2014(9):47-52.
On Remote Experiment Systems Based on Cyber-Physical Networks
LÜQiang,GAOHui-min,WUChen-xi
(School of Automation, Hangzhou Dianzi University, Hangzhou 310018, China)
As a format linking the theory with practice, experiment teaching is an important part of the modern teaching in the colleges and universities. Enough practice time is a precondition of the successful experiment teaching. However, on one hand, the number of experimental apparatus is smaller, but the number of students is higher. On the other hand, the time of using the experimental apparatus is limited, but the spare time of students is enough. The real effect of experiment teaching is not perfect. In order to deal with the aforementioned issues, based on the cyber-physical networks, a remote experiment system is proposed, where the modern information technologies, such as remote access, time allocation, virtual simulation, model switching, physical experiment, state monitoring, and data sampling are employed. According to the course Micro-robot and C51 application, the characteristics, structure, and functions of the proposed system are illustrated. Moreover, the main technologies in the proposed systems are described and the application format is also given.
remote experiment; experiment teaching; virtual simulation; cyber-physical networks
2015-04-05
国家自然科学基金项目(61375104);杭州电子科技大学高教研究课题(XXYB1310)
吕 强(1977-),男,辽宁抚顺人,博士,副教授、研究方向为信息化教学资源开发与应用,多机器人合作控制。
Tel.:13819139153; E-mail:lvqiang@hdu.edu.cn
G 40-057
A
1006-7167(2016)05-0114-04
猜你喜欢
军事文摘(2022年20期)2023-01-10
英语文摘(2021年11期)2021-12-31
甘肃教育(2020年4期)2020-09-11
物理之友(2020年12期)2020-07-16
甘肃教育(2020年8期)2020-06-11
学生天地(2018年19期)2018-09-07
中国教育技术装备(2016年11期)2016-12-01
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
