多种群遗传算法滑模观测器系统设计
2016-12-06 01:41姚明林
微特电机 2016年1期
张 欣,李 兵,姚明林
(1.唐山科技职业技术学院,唐山 063000;2.唐山学院,唐山 063000)
多种群遗传算法滑模观测器系统设计
张 欣1,李 兵2,姚明林2
(1.唐山科技职业技术学院,唐山 063000;2.唐山学院,唐山 063000)
针对工业控制领域节能改造且精度要求高的实际需求,设计了多种群遗传算法滑模观测器系统。系统利用饱和函数作为切换函数,应用多种群遗传算法对滑模观测器进行参数寻优,采用锁相环结构来减小高频分量对角度估算的影响。通过矢量控制调节电机转速,搭建系统仿真模型。仿真结果表明,多种群遗传算法滑模观测器系统能够降低环境干扰等不确定因素的影响,抖振明显削弱,精确地估计电机速度,实现滑模观测器优化设计,提高了永磁同步电机无速度传感器控制系统运行的可靠性。
多种群遗传算法;滑模观测器;锁相环;无测速传感器
0 引 言
永磁同步电机无测速传感器系统采用矢量控制技术,无直轴电流分量,电机无直轴电枢反应,使转矩随着定子电流的变化而变化,便于提高系统的性能。而转子位置和转速的估计是无测速传感器控制的核心,调速系统性能的优劣取决于动态响应速度和状态估计的精度。根据文献[1]得出传统常值切换滑模控制开关时间和空间上的滞后,使滑模观测器的抖振增加,估算电流沿实际值上下波动。
本文以Sigmoid函数代替传统的开关函数,并以多种群遗传算法来实现k值的自适应更新,使系统同时具有调节速度快和稳态精度高的优点。同时考虑到永磁同步电机是一个复杂的非线性系统,采用滤波器和锁相环进一步提高磁极位置和转速检测的准确性。
1 永磁同步电机
在α,β两相静止坐标系下建立数学模型。电压方程:
(1)
电动势方程:
(2)
转矩方程:
(3)
式中:uα,uβ为定子电压;eα,eβ为定子感应电动势;iα,iβ为定子电流,Rs为定子相电阻;Ls为定子相电感;ω为转子角速度;θr为转子转角;ψf为转子磁链;p为电机极对数;T为电磁转矩。
2 滑模电流观测器
2.1 数学模型
建立滑模电流观测器:
(4)
(5)

常规非连续控制的切换函数sign只能取1和-1两个值,而在Sigmoid函数中,正的常数a用来调整Sigmoid函数的斜率,电流误差使Sigmoid函数的输出值在1和-1之间连续变化,因此Sigmoid函数为光滑连续曲线,减小了滑模观测器的抖振[2]。
2.2 稳定性分析

(6)
根据稳定性条件,有:
得出观测器的稳定条件:
(7)
传统的滑模观测器中k的数值通常是根据经验选定的常数,但实际系统中电流的观测误差是时变的,固定的常数有可能增大抖振噪声,使估计误差增大。
2.3 多种群遗传算法设计
[3],遗传算法以生物遗传学为基础,通过遗传、变异、选择,并反复迭代向更优解的方向进化,直到满足指标输出最佳个体。
传统滑模观测器通过经验确定一个合适的滑模增益k值,使系统的偏差快速的趋近于零。也就是说滑模增益k值决定了运动点是否尽快地趋近于滑模超平面并沿滑模超平面做滑模运动。但传统滑模观测器滑模增益k值是固定的常数,这样有可能增大抖振,使估计误差增大。为了减小抖振,缩短趋近滑模超平面时间,所选取的滑模增益k值应在满足稳定性条件的前提下随误差变化。
用多种群遗传算法优化滑模观测器,选取滑模增益k值相关的变化参数,产生随机的初代种群。在初代种群进化过程中,根据目标函数把初代种群分化为两个不同特性的子种群。通过反馈值的偏差来调用相应的子种群,逐代进化,直到满足性能指标,输出最佳个体[4]。
1)当误差e(t)较大时,系统离滑模面较远,趋近运动比较剧烈,快速上升阶段。
2)当误差e(t)较小时,系统处于趋向滑模面,趋近运动比较缓和,平稳上升阶段。
根据误差e(t)变化的阶段选择的适应度函数J如下:
(8)
式中:T为算法执行时间;Δe(t)为两次采样时间系统误差之间的差值;e(t)为本次采样的系统误差;i为控制系统的输入量。
为便于在计算机中描述函数,把式(8)离散化得到式(9):
(9)
式中:n为总采样次数;E(n-1)为上一次采样的系统误差;E(n)为本次采样的系统误差;i为控制系统的输入量,上述计算过程如图1所示。

图1 多种群遗传算法运算过程
分段的适应度函数体现了离滑模面的距离,分别采用具有不同属性的种群以各自的进化策略参与控制[5],以实现缩短到达时间和减小抖振的目的。
当选取合适的增益k时,滑动模态的切换面:
综上所述,超声微泡造影剂携RPM相较于单独应用RPM作用效果更加明显,能够使药物准确且快速的发挥疗效,从而抑制膀胱肿瘤T24细胞的生长和繁殖;并通过与mTOR蛋白的作用而使得大部分细胞停滞在G1期,加快细胞的凋亡。超声微泡造影剂携RPM在膀胱癌的治疗当中具有很好的临床应用前景。
(10)
由Sigmoid函数,多种群遗传算法,滤波器构成的滑模观测器,当输入电流,电压等参数,最终估算出反电动势。
(11)
2.4 锁相环结构
锁相环结构的作用是将反电动势转化为角度和位置信号,其检测原理如图2所示。

图2 锁相环位置检测原理图
转子的位置速度:
(12)
(13)
由此化简结构框图,如图3所示。

图3 锁相环位置检测结构框图
系统的闭环传递函数G(s):
(14)
位置估算的误差传递函数Ge(s)为:
(15)
当输入斜坡函数时,稳态误差:
(16)
从以上分析得出,加入了锁相环结构后,相位估算误差逐渐减小直至为零。
3 无测速传感器系统仿真
为了测试多种群遗传算法滑模观测器控制性能,分别在转速为1 200 rad/s,1 000 rad/s,300 rad/s的情况下对系统进行测试。
当设定转速1 200 rad/s时,滑模观测器是系统经过在0.35 s后平稳运行,多种群遗传算法滑模观测器在0.2 s后平稳运行,测试结果如图4所示。
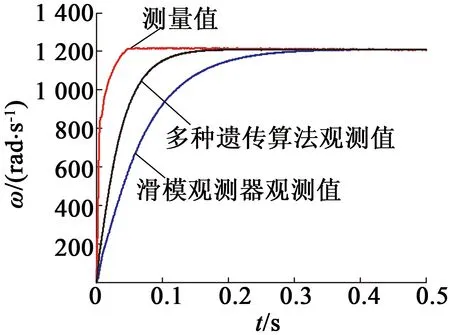
图4 1 200 rad/s转速图
当设定转速为1 000 rad/s时,滑模观测器的观测值在0.33 s后稳定运行,多种群遗传算法滑模观测器的观测值在0.17 s后稳定运行[6],测试结果如图5所示。

图5 1 000 rad/s转速图
当设定转速300 rad/s时,随着转速逐渐变小,测试结果逐渐不精确。滑模观测器的观测值在0.27 s后稳定运行,多种群遗传算法滑模观测器的观测值在0.14 s后稳定运行,测试结果如图6所示。
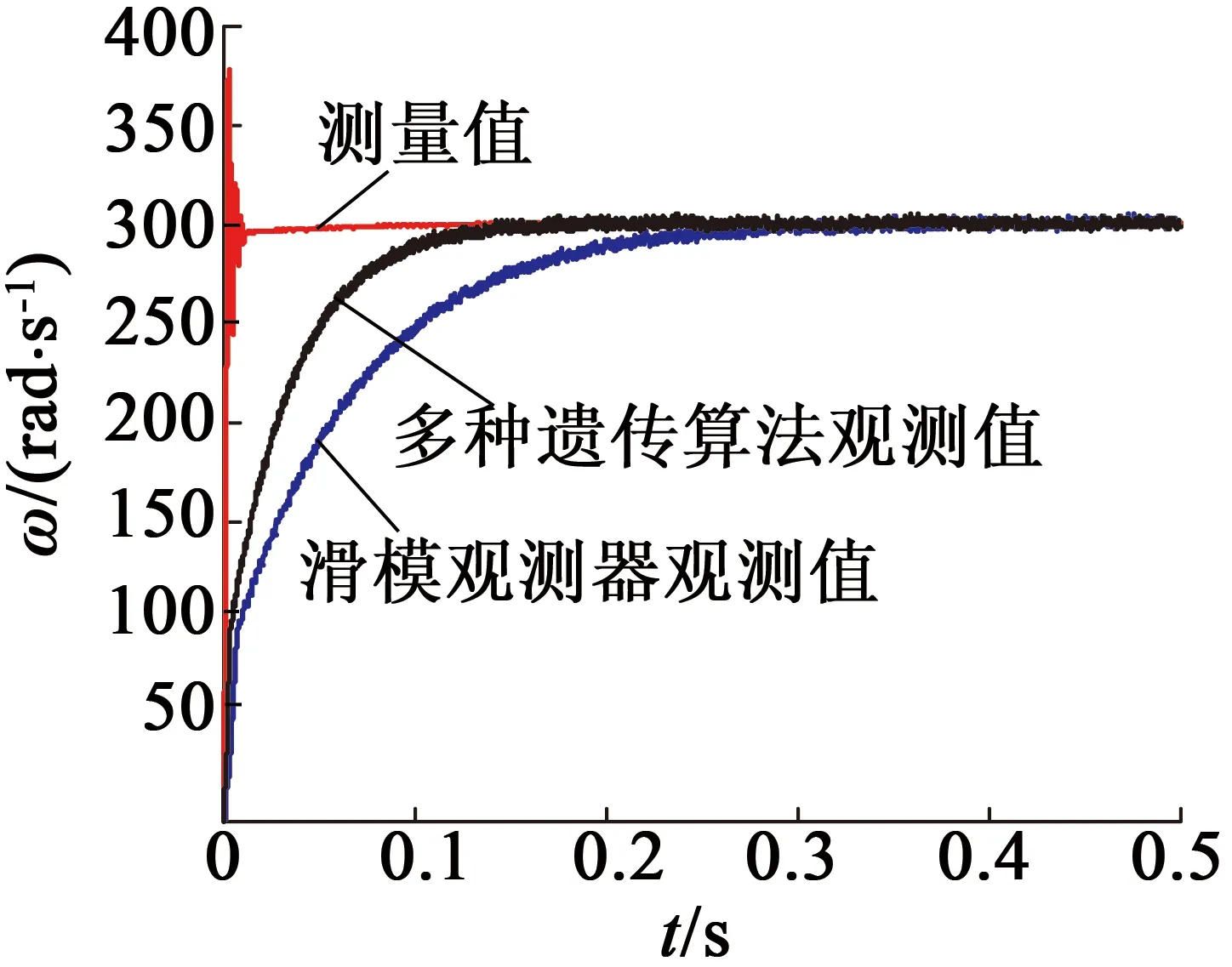
图6 300 rad/s转速图
通过上述仿真可以看出,多种群遗传算法滑模观测器使系统在不同的速度段都能快速接近实际值,误差小,抖振较弱,估算性能明显优于传统滑模观测器。
4 结 语
本文介绍了一种基于多种群遗传算法滑模观测器估算永磁同步电机转速的设计方案,通过采用Sigmoid切换函数和根据误差选取具有不同属性的种群逐代进化来确定k值策略,以实现缩短到达滑模面的时间和减小抖振的目的。锁相环结构的设置使观测误差进一步减小。仿真结果表明,该控制方案加快了系统响应的速度,提高了估算精确度,进而降低了系统的成本。
参考文献
[1] 陈广辉,曾敏,魏良红.无位置传感器永磁同步电动机矢量控制系统综述[J].微特电机,2011,39(12):64-75.
[2] 郭健,秦建波,吴益飞.永磁同步电机抗抖振滑模控制算法研究[J].电力电子技术.2012,46(2)108-110.
[3] 罗清伟,曹广忠,汪济欢.基于改进的滑模观测器无传感器永磁同步电动机矢量控制[J].微特电机,2014,42(3):55-60.
[4] 李立毅,唐勇斌,刘家曦,等.多种群遗传算法在无铁心永磁直线同步电机优化设计中的应用[J].中国电机工程学报,2013,33(15):69-76.
[5] 彭东林,蒋艳云,汤其富,等.基于BP神经网络和遗传算法的变耦合系数型时栅结构优化[J].仪表技术与传感器,2013,(4):103-105.
[6] 邱忠才,郭翼岭,肖建.基于Sigmoid函数的PMSM滑模变结构位置速度观测器[J].电气传动,2014,44(3):3-7.
Design of SMO System Based on Multi-Population Genetic Algorithm
ZHANGXin1,LIBing2,YAOMing-lin2
(1.Tangshan Technology Occupation Technical College,Tangshan 063001,China; 2.Tangshan College,Tangshan 063000,China)
In view of the actual demand of energy saving in the field of industrial control and high precision, the multi-population genetic algorithm SMO system was designed.The system used the saturation function as the switching function, used the multi-population genetic algorithm to optimize the parameters of the SMO, and used the phase locked loop structure to reduce the influence of the high frequency components on the angle estimation.The speed of the motor was regulated by vector control and the simulation model of the system was built.The simulation results show that the system can reduce the influence of uncertain factors such as environmental disturbance and so on. Buffeting is obviously weakened, and the speed of motor can be estimated accurately. The optimal design of SMO is realized. The reliability of speed sensorless control system of PMSM is improved.
multi-population genetic algorithm; sliding mode observer(SMO); phase locked loop; speed sensorless
2015-10-03
河北省科技支撑计划项目(1327201D)
TM341;TM351
A
1004-7018(2016)01-0048-03
张欣(1982-),女,硕士,讲师,研究方向为过程控制。
猜你喜欢
防爆电机(2022年3期)2022-06-17
防爆电机(2021年2期)2021-06-09
防爆电机(2020年6期)2020-12-14
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
计测技术(2020年6期)2020-06-09
电子制作(2019年15期)2019-08-27
北京航空航天大学学报(2017年6期)2017-11-23
电测与仪表(2016年5期)2016-04-22
电测与仪表(2016年22期)2016-04-12