
新型石板材上下料装置的结构设计与轨迹规划
2016-12-06 08:02刘庆龙张进生高丽君肖边江
组合机床与自动化加工技术 2016年11期
刘庆龙,张进生,高 伟,高丽君,肖边江
(1.山东大学 a.机械工程学院;b.高效洁净机械制造教育部重点实验室,济南 250061; 2.山东省石材工程技术研究中心,济南 250061;3.日照海恩锯业有限公司,山东 日照 276800)
新型石板材上下料装置的结构设计与轨迹规划
刘庆龙,张进生,高 伟,高丽君,肖边江
(1.山东大学 a.机械工程学院;b.高效洁净机械制造教育部重点实验室,济南 250061; 2.山东省石材工程技术研究中心,济南 250061;3.日照海恩锯业有限公司,山东 日照 276800)
为提高石板材研磨生产线的自动化水平,改善石板材上下料装置的适应性、稳定性和工作效率,在现有的石板材上下料装置基础上,设计新型石板材上下料装置,并根据轨迹规划方法,在直角坐标空间中对末端执行器进行了轨迹规划。采用有过渡圆弧的门字路径以避免末端执行器在拐角处抖动,分别对三个平动和一个转动采用修正梯形加速度模式,使末端执行器的位移、速度、加速度随时间连续变化,平滑过渡。在Adams和Matlab中进行运动仿真,结果表明:采用有过渡圆弧的门字路径和修正梯形加速度模式的轨迹规划方案,装置运行平稳,动力特性好,工作效率高。
Adams;Matlab;上下料;轨迹规划;修正梯形
0 引言
石板材研磨生产线噪声大、粉尘浓度高,作业环境恶劣,石板材的上料和下料过程自动化水平低,诸多石材加工企业面临“招工难”、“用工贵”的困境[1-2],因此,石板材自动上下料装置应运而生。然而现有的石板材自动上下料装置工况适应性差,运行不稳定,效率不高,这不仅与装置的结构设计有关,与装置的运动轨迹也是有关的[3]。
本文采用新型结构设计,以末端执行器的轨迹规划为突破口,研究石板材自动上下料装置的优化问题。运动机构的轨迹规划是指,根据预先设定的约束条件,寻求一种从初始位姿到终点位姿的运动规律[4-6]。目前还没有石板材自动上下料装置轨迹规划的相关研究,然而国内外研究者针对并联机器人轨迹规划、码垛机器人轨迹规划等开展了大量的研究。郭超等[7]采用直角门字路径,虽然末端执行器的位移、速度、加速度变化连续,但在轨迹拐角处会产生抖动[8];高君涛等[9]将基于五次多项式的加速-恒速-减速运动规律应用于新型码垛机器人,虽然克服了匀加速-恒速-匀减速运动规律加速突变的缺陷,但是相比修正梯形加速度规律,效率较低[10]。运动轨迹可在关节坐标空间和直角坐标空间中进行规划,但对于需要避开一定障碍物的花岗石板材上下料装置,适合采用直角坐标空间[11]。因此,本文在直角坐标空间中采用有过渡圆弧的门字路径和修正梯形加速度模式,并利用Adams和Matlab进行运动仿真,通过分析末端执行器的位移、速度、加速度的时间响应、运动特性和工作效率,从而验证轨迹规划的合理性。
1装置工况介绍及结构设计
1.1 自动上下料装置的工况介绍
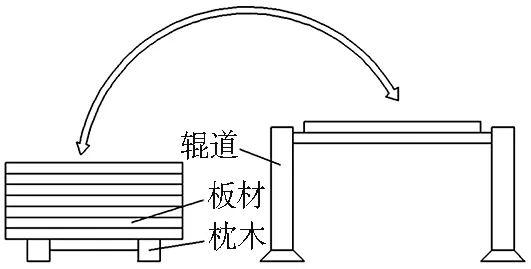
板材的上下料流程如图1所示,板材在料台上有两种摆放方式,如图2 a所示的水平放置和图2 b所示的倾斜放置。水平放置方式主要是针对毛面板材;倾斜放置方式主要针对光面板材,以避免已加工表面擦伤。石板材自动上下料装置的任务就是实现板材由料台到辊道过程的自动化。
某石板材研磨生产线的相关技术参数如表1所示。

图1 石板材研磨生产线上下料流程
(a)板材水平放置
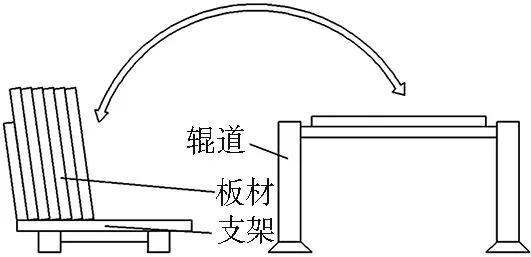
(b)板材倾斜放置
图2 石板材在料台上的放置方式
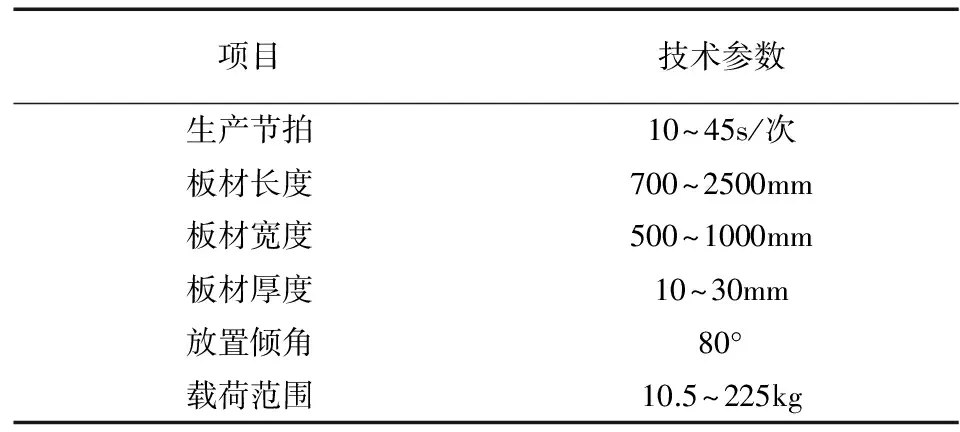
表1 生产线相关技术参数
1.2 自动上下料装置的结构设计
作者设计了一套结构简单、紧凑,经济适用的悬臂式石板材自动上下料装备,如图3所示,包括立柱、横梁、纵向运动机构、横向运动机构、翻转机构、末端执行器、辊道和料台。横向运动机构由伺服电机驱动齿轮齿条沿横梁往复运动;纵向运动机构由气缸驱动沿横向运动机构上下运动;板材吸附装置固定在纵向运动机构下端,由固定在纵向运动机构上的气缸推动末端执行器实现翻转运动,这样末端执行器有沿x、y方向的平动自由度和沿z轴的转动自由度,共三个自由度,四个分运动。装置在横梁最远端设有板材位置检测系统,会将检测到的板材位置信息传送到上位机自动编程,以控制板材运行轨迹。
本装置将末端执行器的转动融入平动中,这样不仅能实现板材水平放置时的上下料要求,还能满足板材倾斜放置时的上下料要求,无需另外设置翻板装置,可节约成本,提高效率。
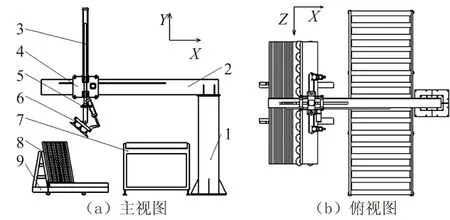
1.立柱 2.横梁 3.纵向运动结构 4.横向运动结构 5.翻转机构 6.末端执行器 7.辊道 8.板材 9.料台
图3 花岗石条形板自动上下料装置三维实体模型
2 自动上下料装置的轨迹规划
2.1 末端执行器的路径规划
对于石板材自动上下料装置的吸附-放置作业任务,一方面需要控制到达吸附点和放置点的位置,另一方面需要控制末端执行器的位姿,从而避开辊道,防止发生碰撞。本文仅对某一位置板材的上料过程进行轨迹规划和运动仿真,以展示轨迹规划方法。

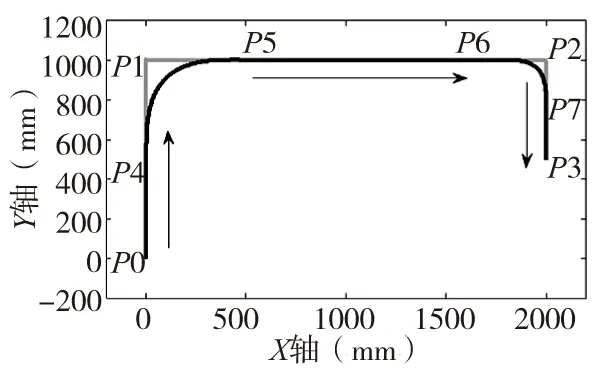
图4 末端执行器路径
2.2 修正梯形加速度模式
对石板材自动上下料装置进行轨迹规划,运行平稳是其基本原则,这就意味着板材运动的位移、速度和加速度不能产生突变。修正梯形运动规律的位移曲线及其对时间的三阶导数连续,且在同样位移和最大加速度下,和常用的正弦、多项式模式相比,其运行效率最高[10],故选择该模式为吸附-放置作业轨迹规划的运动规律。
改进板材上下料运动的加速度函数,可以减小装置受到的冲击,令加速度函数为修正梯形模式[12],如下:
(1)
其中,amax为运动过程中所允许的最大加速度,T为运行周期。式(1)两边连续进行两次积分,由边界条件t=0时s=0且v=0,以及位移的连续性,可得修正梯形模式的位移函数:
(2)
(3)
式中,S为T时间内的位移,将式(3)代入式(1)、(2)中即得到修正梯形轨迹模式。
对于三段平动,均以amax1=165mm/s2,分别将amax1和各段位移代入式(3)即可得到各段运动所需时间:T1=5.446s,T2=7.702s,T3=3.851s。根据2.1小节的路径规划,将amax1、各段位移和各段运动时间分别代入式(2)即可得到各段的位移函数。这样运行总时间T=T1/2+T2+T3/2=12.3515s,和直角门字路径T1+T2+T3=17s的运行总时间相比,工作效率提高了27.3%。
3 轨迹规划的Adams和Matlab仿真及分析
3.1 上下料装置的Adams仿真建模
在Solidworks中建立石板材上下料装置的三维实体模型,将模型导入Adams,所有构件材料定义为钢,从而为构件设置了质量。在立柱和大地间、横梁和立柱间、辊道和大地间及马架和大地间分别添加固定副,横向运动机构和横梁间、纵向运动机构和横向运动机构间添加移动副,纵向运动机构和板材吸附装置的铰接处添加转动副。由此,建立了石板材自动上下料装置的仿真模型,如图5所示。

图5 上下料装置的Adams仿真模型
3.2 轨迹规划的Adams和Matlab仿真
仿真时,若经过运动学反解,将直角坐标空间中的运动轨迹转化到驱动元件中,再为驱动元件添加驱动进行仿真,驱动函数变得很复杂,编程困难[13]。因此,在板材质心设置一个mark点,在该mark点添加转动驱动;在横梁和横向运动机构间添加移动驱动;在横向运动机构和纵向运动机构间添加移动驱动,然后利用Adams/PostProcessing模块绘制需要输入的运动轨迹。依据3.1节中的轨迹规划,采用Adams中的If函数分别设置三个驱动的加速度函数进行运动仿真,仿真结果如图6所示。
经过Adams运动仿真,验证了该轨迹规划方式不会和辊道发生干涉。为了进一步展示该轨迹规划方式下板材的运动状况,根据第2节中自动上下料装置的轨迹规划,首先,利用Matlab绘制出板材质心的运行轨迹,然后以0.25s为时间间隔,分别将板材运行周期各时间点的位姿(即其质心位置和翻转角度)插入板材质心的运行轨迹中,即可仿真出该轨迹规划模式下的板材运动轮廓[14],如图7所示,x轴为板材的横向位移,y轴为板材的纵向位移,原点为板材质心的起始位置,板材由料台上倾斜放置的100°翻转到辊道上水平放置在的180°。
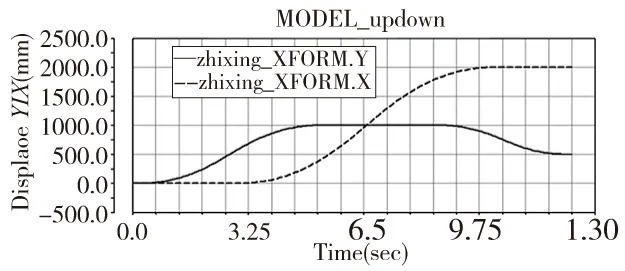
(a)板材质心x、y方向位移
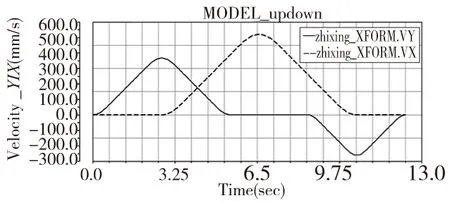
(b)板材质心x、y方向速度
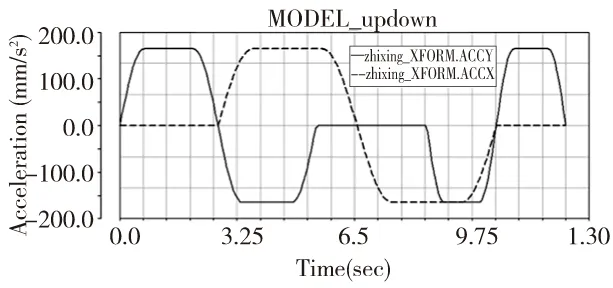
(c)板材质心x、y方向加速度

(d)板材绕z轴旋转角位移

(e)板材绕z轴旋转角速度

(f)板材绕z轴旋转角加速度
图6 轨迹优化后板材移动和转动的位移、速度、加速度时间响应曲线
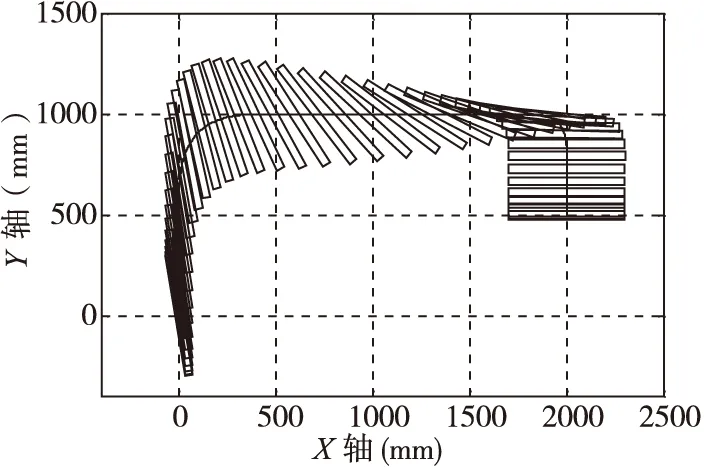
图7 轨迹优化后的板材运动轮廓图
3.3 上下料装置的仿真分析
对纵向运动、横向运动和翻转运动三个分运动均采用修正梯形加速度模式,并调整各运动的起始时间。经Adams仿真验证,板材没有和辊道发生碰撞,该轨迹规划模式下,装置有两个突出优点:①如图6a、6b、6c所示,实线为板材竖直分运动的位移、速度、和加速度,虚线为板材水平分运动的位移、速度和加速度。两个分运动的位移、速度、加速度随时间变化连续,过渡平滑,没有突变点;如图6d、6e、6f所示,板材旋转的角位移、角速度和角加速度随时间变化连续,过渡平滑,没有突变点。故装置运行平稳,动力特性好。②通过改变各分运动的起始时间,得到带有平滑过渡圆弧的运动路径,和直角门子路径相比,各分运动的最大加速度amax和运动时间保持不变,而总体运动时间大大缩短,提高了装置的工作效率。
Matlab仿真得到图7,为板材在图3a方位时的运动轮廓,可以进一步验证该轨迹规划下,板材不会和辊道发生运动干涉;另外,还可以直观的看出板材在运动路径上的位姿变化,在三个分位移上,板材轮廓分布均是两头密集,中间稀疏,反应了修正梯形加速度模式的运动特点,这一点和Adams仿真得到的图6是一致的。
4 结束语
在研究石板材研磨生产线工况和现有石板材上下料装置的基础上,设计了一种悬臂式板材自动上下料装置,并利用Adams和Matlab对装置的末端执行器进行了轨迹规划和仿真分析。主要得到了以下结论:
(1)新型石板材自动上下料装置不仅能满足板材在料台上水平放置时的上下料要求,还能满足板材在料台上倾斜放置时的上下料要求。将板材的翻转运动融入到平移运动中,提高了工作效率。
(2)在直角坐标空间中采用有过渡圆弧的门字路径和修正梯形加速度模式规划上下料装置末端执行器的运行轨迹,石板材的位移、速度、加速度随时间变化连续,无突变点,装置运行平稳,动力特性好。
(3)同等位移和最大加速度条件下,有过渡圆弧的门字路径轨迹比直角门字路径轨迹更高效。
[1] 白硕玮,张进生,王志,等.面向清洁生产工艺方案设计的洁净特征建模与评价技术[J].计算机集成制造系统,2014,20(7):1572-1582.
[2] KHALED N, ZIAD M, BLAIR B, et al. Environmental management of the stone cutting industry[J].Journal of Environmental Management, 2009, 90(1):466-470.
[3] 袁安富,沈思思,余莉,等.基于ADAMS和MATLAB的喷涂机器人运动仿真研究[J].组合机床与自动化加工技术,2014(8):44-48.
[4] R Menasri, A Nakib, B Daachi, et al. A trajectory planning of redundant manipulators based on bilevel optimization [J].Applied Mathematics and Computation, 2015(250):934-947.
[5] Yihui Wang,Bart De Schutter,Ton J J van den Boom,et al.Optimal trajectory planning for trains under fixed and moving signaling systems using mixed integer linear programming[J]. Control Engineering Practice, 2014(22):44-56.
[6] A Gasparetto, V Zanotto. Optimal trajectory planning for industrial robots[J].Advances in Engineering Software, 2010,41(4):548-556.
[7] 郭超,辛世界,李玉胜.两种坐标空间中Delta机器人轨迹规划仿真[J].制造业自动化,2014,6(2):49-51.
[8] 王瑞芳,刘林,邱继红.基于MATALAB和ADAMS的并联机器人的轨迹规划仿真研究[J].机床与液压,2014,42(21):24-27.
[9] 高君涛,原思聪,曹映辉,等.基于ISIGHT平台的工业码垛机器人轨迹优化设计[J].组合机床与自动化加工技术,2015(9):55-59.
[10] 倪雁冰,董娜,尘恒.一种全回转并联机械手轨迹规划研究[J].机械设计,2014,31(4):31-36.
[11] 沈雅琼,叶伯生,熊烁.基于齐次变换矩阵的机器人轨迹规划方法 [J].组合机床与自动化加工技术,2014(1):5-9.
[12] 唐和业.一种两自由度并联机械手教学演示平台数控系统的研究与开发[D].天津:天津大学,2007.
[13] 贾小刚,袁志业,申东.基于ADAMS和Pro/E的并联机器人运动学仿真[J].机床与液压.2009,37(2):95-97.
[14] Bai Li, Zhijiang Shao. Simultaneous dynamic optimization: A trajectory planning method for nonholonomiccar-like robots[J].Advances in Engineering Software, 2015 (87):30-42.
(编辑 李秀敏)
Structure Design and Trajectory Planning of New Type of Load-unload Device for Stone Slab
LIU Qing-long1,2,ZHANG Jin-sheng1,2,GAO Wei1,2,GAO Li-jun3, XIAO Bian-jiang3
(1 a.School of Mechanical Engineering; b.The Key Laboratory of the Efficient Clean Machinery Manufacturing,Shandong University,Jinan 250061,China;2. Stone Engineering Research Center of Shandong Province,Jinan 250061,China )
To improve the automation of stone slab grinding production line and refine the adaptation, stability, efficiency of load-unload device for stone slab, we designed a new type of load-unload device for stone slab and the track of end effector was optimized in Cartesian space coordinate according to the existing devices and trajectory planning methods. In order to avoid the shaking of end effector in the corner, we adopted optimized ‘∩’style path. Besides, modified trapezoid acceleration mode was applied to three translational motions and one rotation respectively. In this way, the displacement, velocity, acceleration of end effector changed continuously and transited smoothly. We simulated the trajectory planning in Adams and Matlab, and the simulation results showed that the device has good dynamic property and high work efficiency through optimized ‘∩’style path and modified trapezoid acceleration mode.
Adams; Matlab; load-unload; trajectory planning; modified trapezoid
1001-2265(2016)11-0046-04
10.13462/j.cnki.mmtamt.2016.11.013
2015-12-08;
2015-12-25
泰山产业领军人才工程专项经费资助项目、山东省自主创新及成果转化专项(2014CGZH0802);山东省自然科学基金(ZR2012EEM032)
刘庆龙(1987—),男,山东泰安人,山东大学硕士研究生,研究方向为机械产品设计和制造自动化,(E-mail)lql_deustar@126.com;通讯作者:张进生(1962—),男,山东高青人,山东大学教授,博士生导师,研究方向为绿色制造,先进制造装备及其自动化技术,(E-mail)zhangjs@sdu.edu.cn。
TH16; TG502
A
猜你喜欢
数学小灵通·3-4年级(2022年11期)2022-11-19
石材(2022年1期)2022-05-23
石材(2022年1期)2022-05-23
石材(2020年12期)2021-01-15
数学小灵通·3-4年级(2020年11期)2020-12-14
制造技术与机床(2019年8期)2019-09-03
汽车维修技师(2019年2期)2019-08-23
数学小灵通·3-4年级(2018年11期)2018-11-16
中国有色金属学报(2018年2期)2018-03-26
制造技术与机床(2017年9期)2017-11-27
