基于积分分离PID控制的自平衡车设计
2016-12-05 03:28:46李满
武汉交通职业学院学报 2016年2期
李 满
(武汉交通职业学院,湖北 武汉 430065)
基于积分分离PID控制的自平衡车设计
李 满
(武汉交通职业学院,湖北 武汉 430065)
在分析两轮共轴小车物理模型的基础上,比较现有的一些控制算法的优缺点,采用积分分离PID算法作为小车的最终控制方式。然后利用Matlab软件自带的Simulink仿真环境,依据两轮共轴小车的物理模型建立较为精确的仿真模型。得出的仿真结果验证了积分分离式PID算法控制的可行性。
两轮共轴平衡小车;积分分离PID;Matlab仿真
20世纪80年代,随着自动化控制理论和机器人技术的不断发展,两轮共轴自平衡系统最初作为新型机器人底盘的研究目的开始出现在实验室。和自行车这样的两轮不共轴系统相比,两轮共轴系统由于自身结构的特点具有占地面积小,灵活性高,通过性强,静止状态可平衡等优点。与汽车的四轮结构相比,两轮共轴结构又具有结构简单,可以原地360°转向的优势。通过在两轮共轴系统车体上安装高效率的嵌入式处理器,高精度的运动传感器以及大扭矩的直流电机,这样的系统取代了骑车人的角色,车体的平衡控制可以无需人为干预,这样的系统也被称之为两轮共轴自平衡系统。
到了21世纪,两轮共轴自平衡系统逐渐从实验室走向民用市场,并衍生出了一系列的民用产品,包括单轮体感自平衡车,两轮体感自平衡车,等等[1]。这些产品非常适合室内场馆代步,短途交通,锻炼娱乐等用途,极大解放了人的劳动力。本文在分析两轮共轴小车物理模型的基础上,基于积分分离PID控制算法设计两轮共轴自平衡车,具有重要的现实意义。
1 两轮共轴平衡车系统的建模分析
1.1 两轮共轴平衡车的物理模型
先以普通单摆为例分析一下,普通单摆的平衡实现包含两种情况,一种是受重力的影响在垂直的中线附近来回运动一直到趋近静止,另一种是如果不考虑空气阻力的影响,则可以在中线附近一直摆动下去,而且单摆速度和阻力的大小有关,相当于一种动态的稳定平衡状态。因而可以考虑把两轮共轴自平衡车看作一级倒立摆来建立模型进行分析,在车轮处加装电机驱动给车轮一个加速度相当于单摆的重力加速度的作用。加速度可控则可以应对各种不同情况的阻力影响[2]。本设计要研究的两轮共轴平衡车的物理结构模型如图1所示。整个系统的驱动来自于2个电机带动的车轮,在二维空间内,当车体重心不在过车轴的垂直面时,受重力水平分量的影响,车体会向前或者向后倾倒,从而失去平衡状态。如果想保持平衡状态,电机必须驱动车轮产生一个水平方向的惯性力抵消重力的影响。如果向前倾,则车轮转向应该使车体向前运动,侧视图如图1(a)所示,如果向后倾,则车轮转向应该使车体向后运动,侧视图如图1(b)所示:
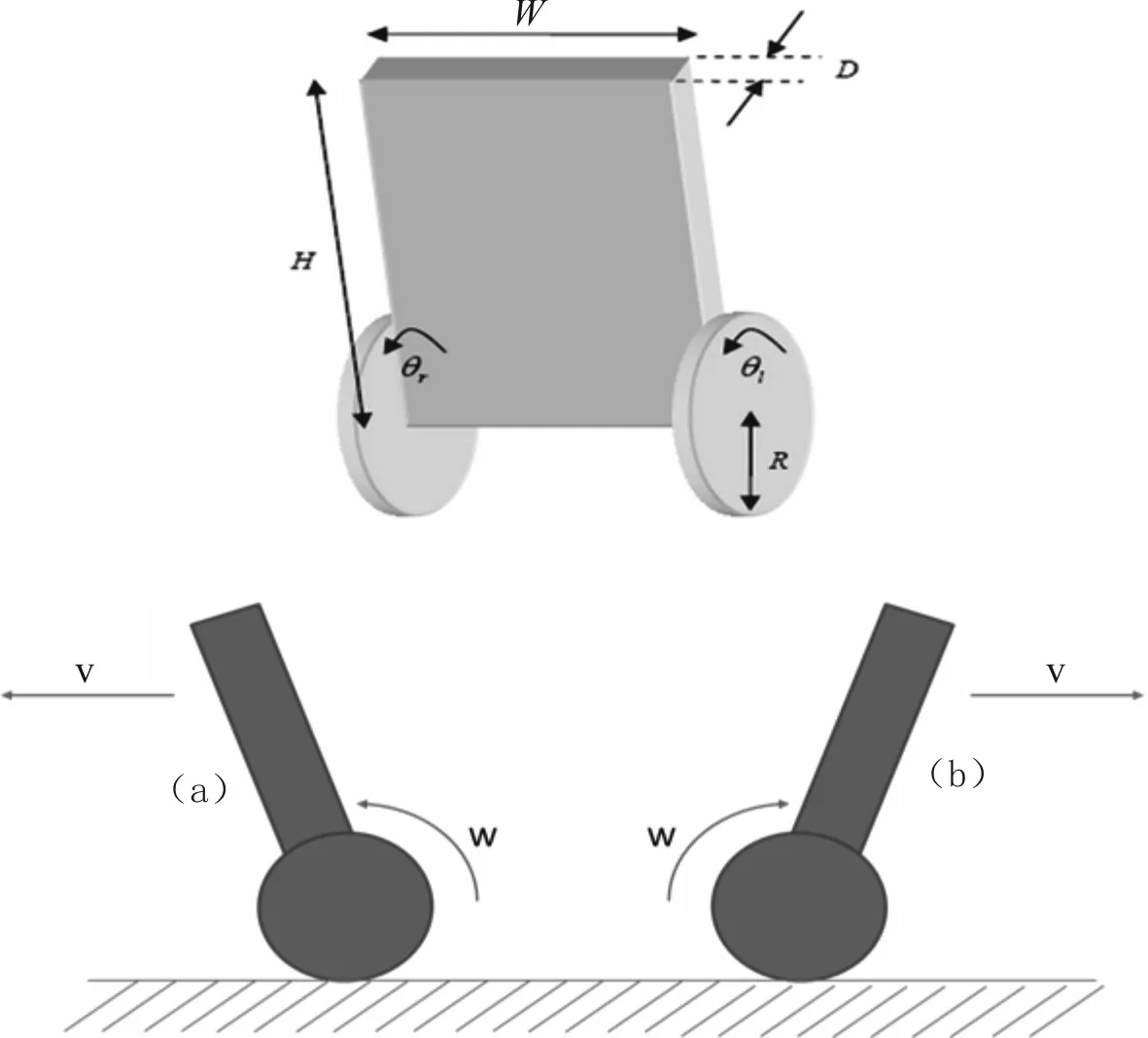
图1 两轮共轴平衡小车二维模型
通过分析可知,在二维空间内,如果不考虑转向,两轮共轴平衡小车模型其实类似一级倒立摆,车身相当于摆杆,车轮相当于转轴。在实际设计中如果要考虑车身转向,则要在三维空间内分析。
1.2 两轮共轴平衡车的控制算法模型
硬件电路系统包括微控制器最小系统电路,惯性传感器电路,电机及驱动电路,蓝牙通信电路以及光电测速电路。对控制器的要求主要是对系统的输出量调整要及时,特别是小车俯仰角的调整速度尽量快一点,因为平衡车要求实时性强,调整速度太慢可能会导致小车不稳定。基于以上理由,两轮共轴平衡小车系统对控制器性能的要求是比较高的。所以本设计在控制器选型上没有考虑传统的51单片机,而是选择了32位ARM架构的STM32作为系统的微控制器。STM32单片机相对于51单片机除了性能上的巨大优势外,丰富的外设接口更容易扩展其他系统模块也是其一大优势。
对于要实现两轮平衡的小车而言,常用的车身传感器主要是用于测量姿态的加速度计,陀螺仪和用于测量速度的光栅码盘,其中加速度计和陀螺仪是小车实现静态平衡的关键传感器,码盘主要用于电机调速。目前在姿态测量领域大部分的加速度传感器和陀螺仪都采用了数字接口。控制器基本无需做AD处理,控制器要使用数字式的运动传感器主要是需要编写对应的数字通信接口程序[3]。微控制器最小系统电路,蓝牙通信电路和MPU6050传感器电路设计在控制电路板上,放置于车体的第二层。对于驱动电机的选择,首先要考虑的是电机的扭矩,因为大扭矩的电机可以为小车提供较大的加速度,使其迅速调整输出状态。依次判断,在电机的类型选择上最好采用直流减速电机。最后就是电机驱动芯片的选择,尽量选择负载能力大一点的驱动IC,否则容易损坏驱动芯片。本设计中,电机及其驱动电路与光电测速电路采用独立小板设计,安装在小车的左右轮上。整个系统的硬件电路结构如图2所示。
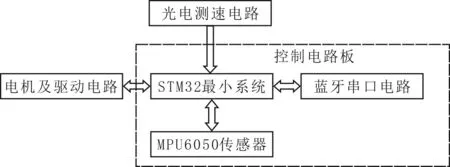
图2 系统硬件电路结构
控制电路板(虚线框内的部分)上采用的元器件方案如下:微控制器最小系统采用意法半导体的STM32微控制器芯片,惯性传感器采用InvenSense公司的MPU6050传感器芯片,蓝牙串口模块采用ATK-HC05。电机以及驱动电路采用的元件方案是SK3530直流减速电机配合TB6612芯片驱动电路,测速电路采用的方案是红外对射式光栅测速码盘。
1.3 软件系统设计方案
系统的软件开发主要的工作是下位机程序的设计。本设计中,针对STM32主控制器的下位机编程开发在Keil公司的RealView MDK集成开发环境中完成。
由于设计目标是使两轮共轴小车能达到静态自平衡和运动自平衡的效果。静态自平衡不需要外界控制,程序启动后先执行静态自平衡,当收到手机端发送过来的蓝牙控制信号时,小车开始运动,此时程序控制小车实现运动自平衡。主函数的程序流程如图3所示。
STM32主控制器的程序总体设计方案如下,主函数控制小车前进、后退、原地左右转的基本动作,各动作的触发方式以接收到的串口数据指令为标志。为简单起见,该串口数据指令可设置为一个字节的数据值,在程序设计时将每次蓝牙串口接收的指令数据在串口中断函数中赋值给全局变量K,主函数完成系统初始化,MPU6050程序初始化,脉冲码盘测速程序初始化,PID控制环程序初始化和串口蓝牙程序初始化之后进入静止自平衡状态。同时,通过循环判断当前K的取值,若收到蓝牙控制信号导致K值不为0,则调用相应的基本动作函数,使得小车完成各种动作。如果想增加更多的其它的动作组合,只需加上相应的动作函数,赋给更多的K值即可。
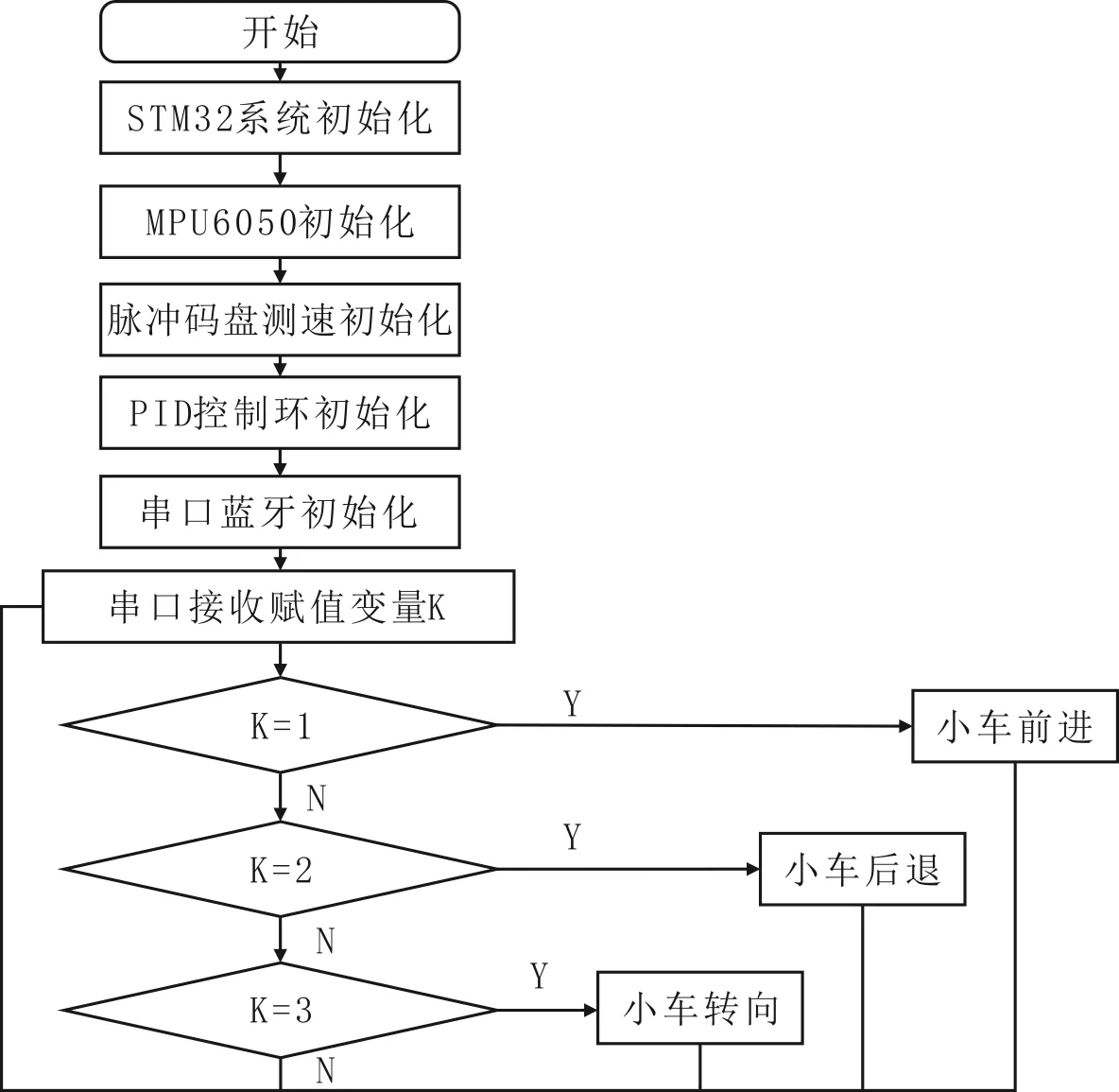
图3 主函数流程图
1.4 积分分离式PID控制设计方案
算法是基于传统PID控制算法的基础上加以改进的一种算法。在传统的普通PID控制器中加入积分控制环节是因为其他的两个必要环节都会产生大量静差,对系统稳定性有很大影响,而积分环节恰恰能改善这种不利影响,从而提高精度。但是实际运行过程中系统在突然状态变化如启动结束时,或者改变设定值的大小程度过大时,在很短的一段时间系统的偏差会输出很大一个数值,经过积分运算后积累,就会出现使算得的控制量超过系统操作环节可能允许的一个最大动作范围相应的控制量标度,最终导致系统的超调甚至振荡[4]。引进积分分离式的PID算法可以避免这种情况的发生,系统的算法模型如图4所示。
该算法模型控制方式如下:设定小车的速度和俯仰角偏差阈值常量,将其值与系统偏差e(t)的绝对值相减,若结果为正,则积分控制开关关闭,此时系统控制器为PD控制器,输出控制量等于比例项与微分项的和。若结果为负,则积分控制开关打开,此时系统控制器为PID控制器,输出控制量等于比例项,积分项,微分项三者之和。
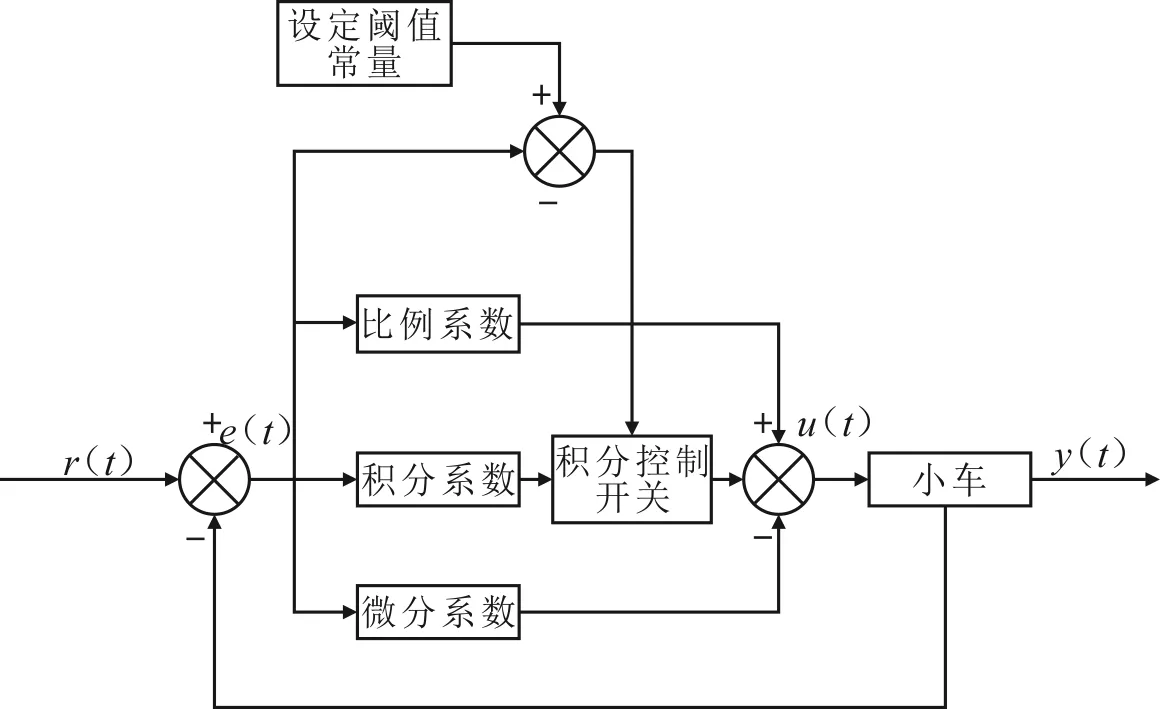
图4 积分分离式PID算法小车控制模型
2 两轮共轴平衡车的Matlab仿真
2.1 Matlab及Simulink仿真环境
Simulink是Matlab软件下的一款图像化仿真设计组件,它提供了一个图形化的用户设计界面,用户只需单击和拖动模块的图标就可以轻松完成建模仿真的过程,使用起来非常方便,对于一些编程比较不擅长的用户也能轻松学会并使用。贴近实际的图形化非常便于接受[5]。
实际小车模型包括蓝牙信号生成模块(Reference Generator),陀螺仪偏置模块(Envirconment),控制算法模块(Controller),小车物理模块(car)以及状态观察模块(Viewer)。为了评估控制算法的实际输出效果,在Matlab下利用Simulink建立小车模型,将仿真模型所用到的与它相关的这些模块从模块库浏览器(Simulink Library Browser)中拖动至模型窗口并组合起来,设置对应的仿真参数并适当修改。
2.2 两轮共轴小车模型的Matlab实现
整个系统的完整仿真模型如图5所示,蓝牙模块模拟遥控器发送的控制信号,控制信号包括静止平衡和运动平衡两种模式,静止平衡模式一般在两轮共轴平衡小车启动初期出现,运动平衡模式在静止平衡达到之后,其中又有前进、后退、左转、右转等几种常用动作。陀螺仪偏置模块模拟实际陀螺仪传感器的输出偏移量。
控制算法模块采用积分分离式PID算法根据小车的当前反馈状态不断调整给左右电机的输出PWM占空比,使系统迅速调整到平衡状态。小车物理模块根据小车的实际模型建立。状态观察模块可以直接观察两轮共轴平衡小车系统的状态输出,包括位置信息、车身俯仰角、车轮转角、车身转角,等等,可用于评估算法效果。
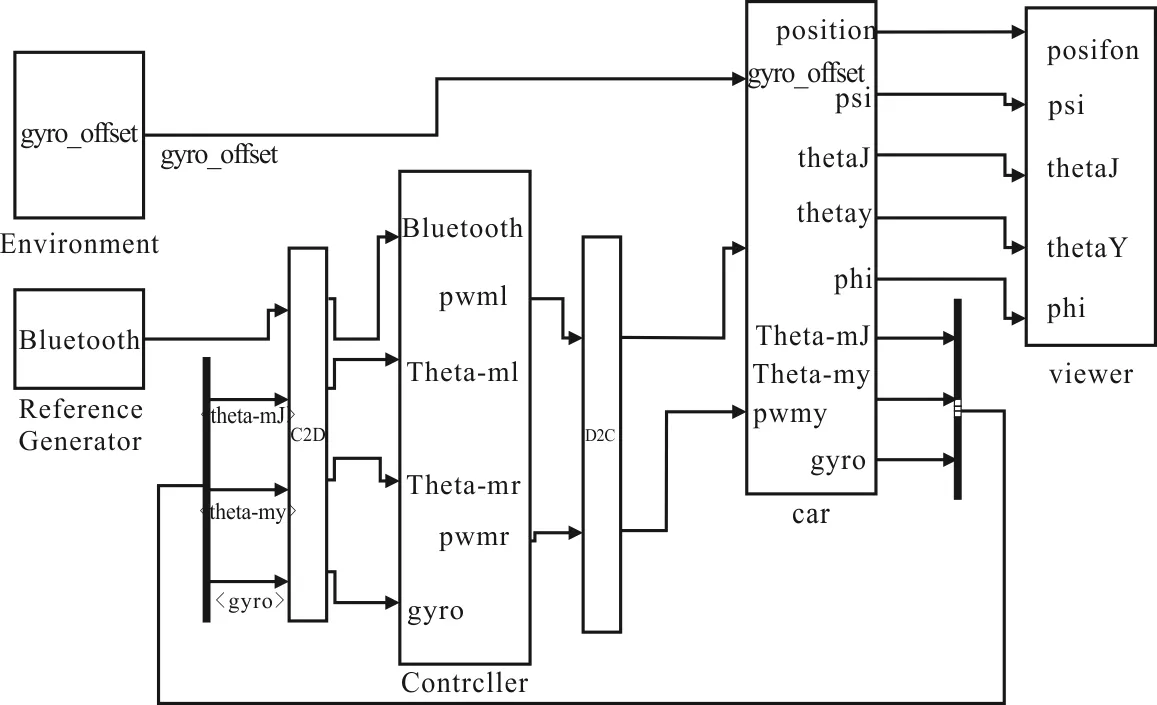
图5 完整系统的Matlab仿真模型
控制算法模块中积分分离式PID算法模型如图6所示,C为阈值常量;In1为反馈回来的系统输出量;Step阶跃模块用于模拟设定值;Out1为控制器输出量。P、I、D参数可通过增益模块设置。本设计中角度阈值设置的大小为2°,速度阈值设定的大小为0.05 m/s。
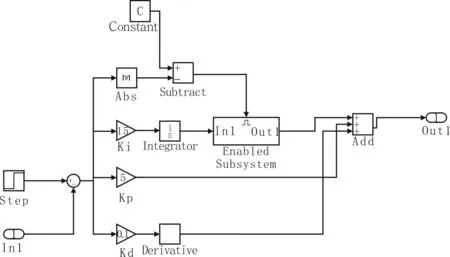
图6 积分分离式PID算法的Matlab模型
2.3 Matlab仿真结果分析
整个系统建立好模型后,给定需要的控制环参数P、I、D以及阈值常数C,就可以对其进行仿真。通过状态观察模块(Viewer)的输出记录小车的状态,该模块可以输出小车的位移以及车身俯仰角。小车的平衡状态可分为两种情况:一种是静止平衡,另一种是运动平衡。静止平衡一般是小车刚启动过程出现,刚启动时需要用手先扶稳车身使其基本保持与地面的垂直状态,因此这个过程会引入一个人为给的初始俯仰倾角,并且这个初始俯仰角不能太大;运动平衡是指当小车达到静止平衡后,通过蓝牙遥控器发送信号使其能完成前进、后退、转弯等运动动作,并且在运动过程中保持平衡状态。
图7显示了静止平衡的仿真结果,其中上图车身位置与时间关系函数,下图为车身俯仰角与时间关系函数。我们从中可以看到,当车身俯仰角初始值为5°时,通过控制算法模块作用,俯仰角短暂振荡后,迅速回复到0°,同时车身位置前后出现15cm的微小位移振幅后马上回复原位。图5中0到1s时间内位移,俯仰角度为0,是因为考虑了启动时陀螺仪传感器的自校准时间。

图7 静止平衡状态的仿真结果
图8显示了运动平衡的仿真结果,小车速度设定值为0.2m/s,俯仰角设定值为0°。整个控制过程如下:小车在20s时,由静止平衡状态启动,向前运动1.5m,在28s左右停止,保持静止状态一直持续到第48s,紧接着通过控制信号使小车向后运动1.5m,在第55s时停止运动,此时小车位置和控制之初基本一致。可以看到小车在启动时位移振幅很小,停止时较大。因为启动时已经是静止平衡状态,俯仰角的阈值大于偏差,此时采用的是PD控制器,振荡幅度较小。而停止时由于惯性作用,俯仰角突然增大,阈值小于偏差,此时采用的是PID控制器造成振荡幅度增大。俯仰角度的幅度变化也基本符合这一规律。
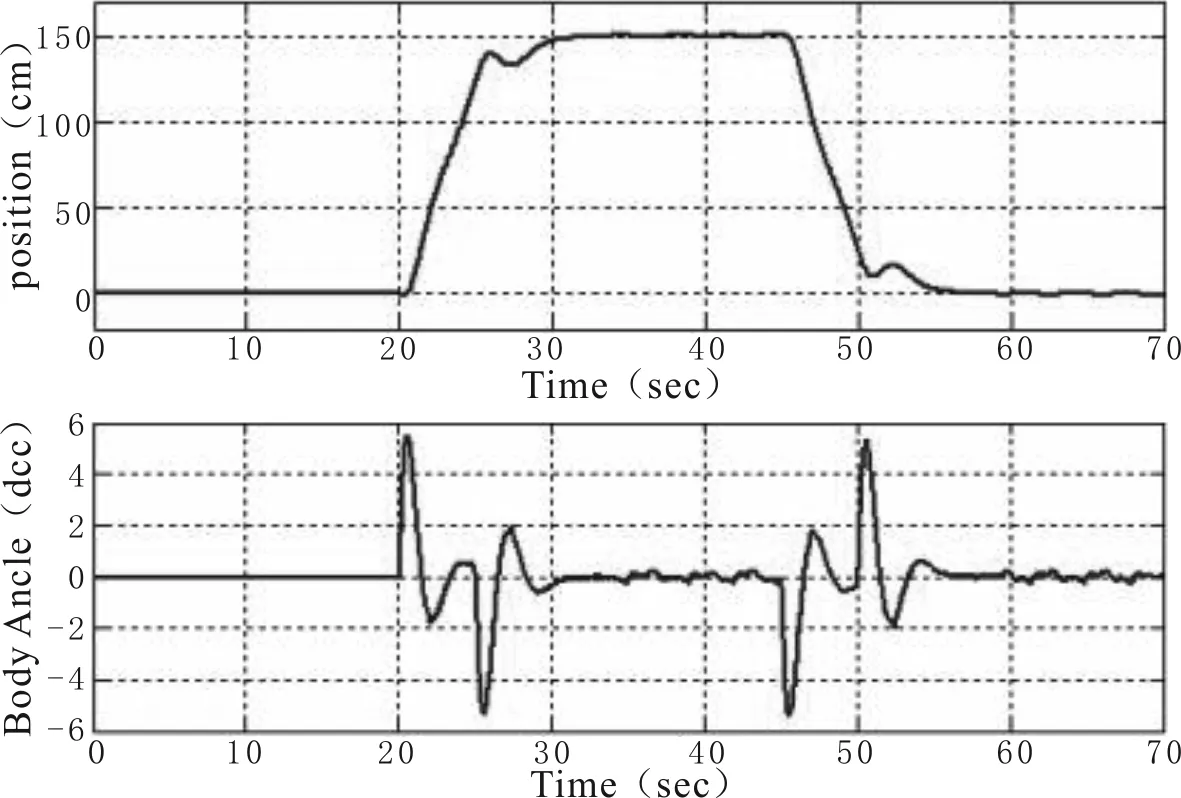
图8 运动平衡状态仿真结果
从以上的仿真结果可以看出,小车模型基本可以达到预期的平衡状态。
3 结语
因为其自身特有的优势,两轮共轴自平衡车作为个人交通工具的普及将会是未来社会的一个趋势,不论是在生产生活中作为运输运载的工具,还是未来智能机器人发展的支撑,对它的研究都具有重要的现实意义。另外,两轮共轴自平衡车是一个极其复杂的系统,它的实现不仅需要机械方面动力学理论,还依赖于先进的控制理论的支撑。因此,对它的研究亦有助于现代自动化控制理论的进一步完善,有一定的研究价值。
对两轮共轴自平衡小车系统的设计而言,传感器数据处理和反馈控制算法是关键,这也是目前平衡机器人控制领域研究的重点方向。随着传感器的数据处理精度提高以及控制算法的日益完善,两轮共轴自平衡小车运行将更加稳定,适应能力更强。
本论文的研究为两轮共轴平衡小车的应用研发提供了从理论到实践的完整案例,对通过改进传统PID平衡控制算法来实现两轮共轴小车平衡进行了有效的尝试。文中基于Matlab建模的系统设计分析方法也为此类平衡小车的开发提供了新的思路。
[1]张海鹏,房建成.MEMS陀螺仪短时漂移特性实验研究[J].中国惯性技术学报,2007,(1):100-104.
[2]袁泽睿.两轮自平衡机器人控制算法的研究[D].哈尔滨:哈尔滨工业大学,2006.
[3]陆军.基于PID和LQR控制的两轮自平衡小车研究[D].成都:西南交通大学,2010.
[4]屠运武,徐俊艳,张培仁,等.自平衡控制系统的建模与仿真[J].系统仿真学报,2004,(4):839-841.
[5]王沫然.MATLAB工程应用从书Simulink4建模及动态仿真[M].北京:电子工业出版社,2002.
铁路公路将迎来逾2万亿元投资盛宴
据《证券日报》报道,2016年的政府工作报告指出,发挥有效投资对稳增长调结构的关键作用。我国基础设施和民生领域有许多短板,产业亟待改造升级,有效投资仍有很大空间。要启动一批“十三五”规划重大项目。完成铁路投资8000亿元以上、公路投资1.65万亿元,再开工20项重大水利工程,建设水电核电、特高压输电、智能电网、油气管网、城市轨道交通等重大项目。中央预算内投资增加到5000亿元。
“十三五”期间铁路投资将继续发挥在经济筑底背景下作为支柱的核心作用。华创证券分析师李佳表示,整个“十三五”规划预计铁路固定资产投资规模将达3.5万亿元至3.8万亿元。其中基建投资近3万亿元,而国内建设将集中于路网完善。城市轨道交通板块在经济低迷期作为稳定经济的抓手,将起到定海神针作用,“十三五”期间铁路投资仍维持高位。
“十三五重点看好动车保养检修市场以及动车组核心零部件国产化带来的零部件替换机会。伴随动车技术 统型 的要求,高铁核心零部件有望逐步实现国产化,零部件企业将受益。”李佳表示。
国家铁路局发布的数据显示,2015年全国铁路固定资产投资完成8238亿元,同比仅增长1.9%,投产新线9531公里。
“铁路行业投资高增长阶段已过,未来行业将维持稳定增长,投资保持在较高水平。铁路设备行业企业整体盈利能力、收益质量可能承压,高毛利率趋势向下,行业估值中枢可能出现下移。铁路设备板块上市公司微观投资逻辑主要来自外延并购,在大行业增速放缓情况下,上市公司要保持较快业绩增速,在进口替代、后市场等内生、新市场途径下,通过外延并购、形成平台化公司,是一个较快路径。”银河证券研究部机械军工行业首席分析师王华君表示。
2016-03-29
李 满(1981-),女,湖北黄石人,武汉交通职业学院公共课部实践中心实验师,主要从事机电、电子通信方面的研究。
10.3969/j.issn.1672-9846.2016.02.018
TP23
A
1672-9846(2016)02-0082-05
猜你喜欢
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
文苑(2018年22期)2018-11-19 02:54:18
电子制作(2018年8期)2018-06-26 06:43:02
北京航空航天大学学报(2018年1期)2018-04-20 06:38:10
制造技术与机床(2017年6期)2018-01-19 02:41:07
北京航空航天大学学报(2017年7期)2017-11-24 05:27:08
北京航空航天大学学报(2017年10期)2017-04-20 08:51:25
电源技术(2015年9期)2015-06-05 09:36:06
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54