基于高清图像处理的弓网检测识别算法
2016-12-02 05:13杨卢强韩通新
铁道机车车辆 2016年5期
杨卢强, 韩通新
(中国铁道科学研究院 机车车辆研究所, 北京 100081)
基于高清图像处理的弓网检测识别算法
杨卢强, 韩通新
(中国铁道科学研究院 机车车辆研究所, 北京 100081)
介绍了一种新型图像识别算法,用来在动态弓网检测中,通过检测车辆原本就配置的监控高清摄像头所拍摄的图像进行识别并定位出弓网位置,可通过先前标定参数与后续计算得出拉出值及导高。该算法基于开源函数库opencv,可以根据环境调整参数,具有广泛的应用环境,以及较高的准确度。试验结果表明该算法能准确快速的定位出受电弓与交叉点,为该项技术应用于高速铁路接触网几何参数高速动态检测提供了基础,并与传统检测方法相比,具有一定优势。
接触网; 图像识别; 拉出值检测; 导高检测;
近年来随着我国电气化铁路事业的飞速发展,城市轨道交通及大铁路对高速接触网动态特性的要求日益提高。目前在弓网动态检测试验中,导高是利用激光测量,正常环境下误差在2~3 cm,且受湿度等环境因素影响大,拉出值的测量可以利用雷达激光,误差在2 cm左右。本文在研究国内外现有接触网检测方法的基础上,针对目前接触网几何参数检测中存在的问题与不足[1],提出了利用高清摄像头拍摄的视距内弓网接触部位所产生的轮廓曲线加以图像识别,智能分析以达到获得接触网几何参数目的的非接触式检测方案。主要用于测量高速状态下的拉出值及导线高度。
1 智能识别简介
图像识别,是指利用计算机对图像进行处理、分析和理解,以识别各种不同状态的对像的技术。一般工业使用中,采用工业相机拍摄图片,然后再利用软件根据图片像素差做出进一步识别处理。图像识别是人工智能的一个重要领域。动态检测系统所接收的原始图像中,除了包含接触线目标信息,还有许多其他的干扰目标。只有对原始图像进行相应的处理,才能准确地分析出接触线目标图像起始点和终止点,确定接触线目标图像宽度,依据所得到的接触线图,利用算法定位出目标,再通过计算得出所需数据。
2 算法主要结构
高速列车的弓网检测摄像头一般安装在弓正前方2~3 m处,大致图像如图1所示。
图像中能显示完整受电弓。其中只要能定位到受电弓在图像中准确位置,就能根据前期标定情况计算出相应导高。而拉出值的计算则要识别出受电弓与接触网的交叉点,再计算与中心点的距离。故弓网图像识别的主要问题就是受电弓的定位与交叉点的查找。
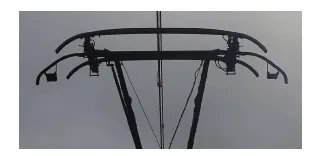
图1 弓网整体图像
首先高清摄像头所抓取的图像需经图像滤波处理,其目的主要为两个:一是抽出对象的特征作为图像识别的特征模式;二是消除图像数字化时所混入的噪声。其要求是不能破坏原图像的重要轮廓与边缘信息。本算法采用的是一种线性平滑滤波:高斯滤波。其处理的二维函数如下[2]:
本算法中,受电弓的定位主要运用了模板匹配算法。利用事先截取的左右弓头图像来匹配经高斯滤波后的图像,然后进行直方图均衡化,再通过匹配计算两个弓头位置来确定导高。在进入隧道时,弓网在高曝光环境下,弓身将呈现为白色,背景为黑色,此时弓头将难以匹配,故为了提高准确度,同时也适应黑夜高曝光的环境,可以先将截取的弓头与视频图像进行canny边缘检测,再利用轮廓来进行匹配,用以排除背景环境的干扰。如图2所示,右下角为弓头的轮廓图,匹配结果在原图中用方框标出。

图2 弓网匹配图像
弓网接触点的定位中,主要难点是排除承力索等其他线路在图像中的干扰,由于承力索与接触线位置、形状相似,区分的主要依据就是高度差导致的成像中的粗细。本算法中,先利用受电弓定位,得出交叉点的大致位置,划分为感兴趣区域(RIO)再将该区域进行闭运算(Closing Operation),也就是先膨胀后腐蚀运算,其数学表达式如下[2]:
dst=clese(src,element)=erode(dilate(src,element))
其中dst:处理结果图像;src:原图像;element:处理内核。通过调整参数,闭运算可以消除较细的承力索图像,只保留接触线,便可进行接触点的定位。
在对弓网接触点的识别定位主要考虑了两条思路:(1)利用标准霍夫变换来进行直线检测,识别出图像中的接触线,再计算其与受电弓的交叉点。(2)对整块RIO区域进行角点检测,由于接触点主要呈现L型角点,使用harris算法提取角点精度较高。经多组试验,测得两种算法定位的交点均有部分误差,但是直线检测由于提取的整段直线,较容易排除误差,且对于背景环境的干扰不敏感:如每隔50 m,支柱将会与弓网重叠一次,此时角点检测会有较多误差,不易排除。而接触线在不被重叠部分仍能被检测到,计算出的交点位置依然准确。故在主程序中采取的是霍夫变换算法(该算法在opencv中可直接调用),在定位出接触线后,只需计算线段在交叉点的像素坐标值,再与中心点位置相比较就可得出拉出值。
程序主要流程图如图3所示。
弓网检测环境变化大,工况不稳定,天气、光照、隧道等都会成为制约图像识别的因素,所以一个参数可调,可自适应环境变化的程序是弓网检测所需要的。在本程序中需要自适应来调整的参数主要为两个:一是整体图像边缘检测用来与弓头匹配时的滞后阈值,二是闭运算时采用的内核矩阵尺寸。
在弓头与视频图像匹配时,为了减少误差,降低背景环境干扰,采用的是canny边缘检测后的轮廓图来匹配。由于原图环境复杂,在各种大雾、雨雪等天气时,像素差不同,相应的计算出的卷积也不同,故canny算子中的滞后阈值需要适时调整。本文使用了反馈来调整滞后阈值,根据提取的轮廓线段条数,来控制高低阈值的数值,直到图像出现清晰,适用的轮廓。并且,由于环境在一定时间段是稳定的,故该调整可在每次检测前,先行进行,可减少后续检测程序的响应时间,增加效率;在闭运算时,由于不同环境,不同工装导致接触线,承力索等在图像中粗细程度不定,闭运算中的膨胀过程要求把较细的承力索滤去,保留接触线。故要求精度较高,主要起作用参数为操作用的内核矩阵。经多种环境测试,初始内核矩阵尺寸为9,利用直线检测的反馈思路基本如下:(1)反馈为一条直线时,尺寸不变。(2)反馈直线大于一条,增加尺寸。(3)反馈直线为0时,减少尺寸。因经过闭运算,故可能一条粗线段会有多条重叠的直线检测出来,故在反馈前需将接近的直线并为一条。
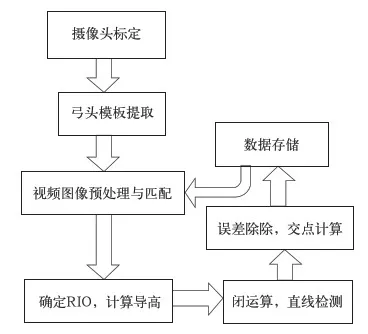
图3 程序流程框图
3 测试结果与对比
如图4上下两部分所示,上半部分为计算出来的RIO区域,下半部分为该区域进行直线检测后绘制出的直线效果。可见较细的承力索被滤除,没有再显示出来。接触线的两条边界作为检测出的直线被记录。再通过边界线段计算处于弓网交点的平均值就是接触点坐标。图5则为大雾环境下弓网直线检测结果,在调整相应参数后,可见仍能滤除承力索,检测出完好的接触线。
图6显示了隧道内部,在曝光灯照亮情况下的视频直线检测结果。此时背景变化剧烈,经部分时间适应后,仍能检测出接触线。
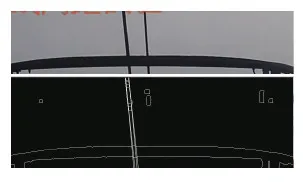
图4 直线检测图像
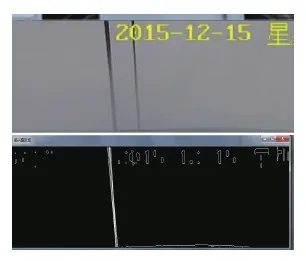
图5 大雾环境下直线检测结果
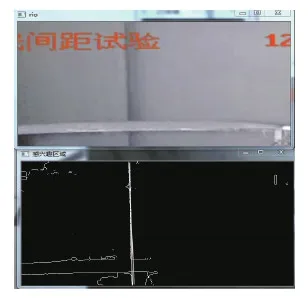
图6 隧道内部直线检测结果
选取环境较好一组检测视频进行计算分析,剔除数据中的坏值。然后将得到的拉出值数据与传统检测数据相比较。部分数据如图7所示,可见两条曲线基本重合。
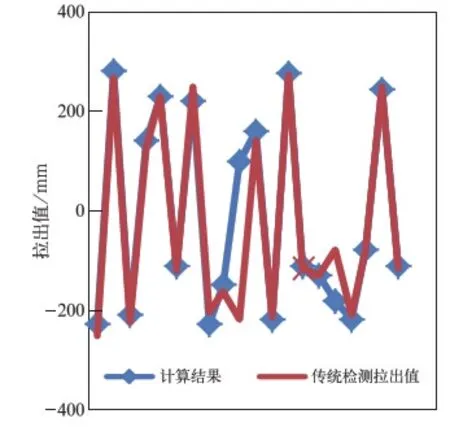
图7 测试对比图
4 新算法优势与不足
本算法优点在于可调的参数用以自适应多变的环境,使得利用视频图像来进行弓网检测有了更广阔的运用范围。且参数的调整都可在每次试验前进行,减少了运行中程序的响应时间。由于匹配基于提取的轮廓,面对其他异物在镜头前的干扰时,有了较强的抗干扰能力。同时,标定只需要得知横竖两边的像素所代表的距离,故只需要一把有刻度直尺就可以,在硬件准备过程中也很方便。
同样,该算法仍存在些不足之处。比如仍难以解决经过软硬横跨时,背景轮廓突变造成的干扰,在这几帧图像中直线检测误差较大;还有在进出隧道口时,由于光线变化剧烈,视频会产生大概1~3 s时间的完全黑屏或者白屏状况,此处无法通过改良程序来解决,只能依赖性能更好的摄像头硬件;在隧道中由于探照灯造成的接触线背部的阴影同样会影响到检测精度。
5 结束语
本算法在基于图像匹配和直线检测上,完成了受电弓的识别与定位,在大部分环境中能有效计算出导高与拉出值,具有较好的实际应用效果。相比于传统的检测方法,图像检测可以利用原本就安装着的监控摄像头,无需额外安装硬件,节省费用与检修时间。图像智能处理技术将是今后发展方向,在弓网检测系统中已有几种检测算法,但算法较复杂,对摄像机,光照等要求较高。本算法是在准确度与经济可行之中寻找平衡的一种尝试。
[1] 刘寅秋,韩通新,刘会平.基于图像处理的接触网动态几何参数测量研究[J].铁道机车车辆,2012,32(5):86-91.
[2] 毛星云.Opencv3编程入门[M].北京:电子工业出版社,2015.
[3] 韩志伟,刘志刚,陈坤峰.基于二代曲波系数定向映射的受电弓滑板裂纹检测技术[J].铁道学报,2011,33(11):64-69.
[4] 陈维荣,冯 倩,张 健.受电弓滑板状态监测的图像目标提取[J].西南交通大学学报,2010,45(1):59-64.
[5] 姚 兰,肖 建.基于模糊熵和Hough 变换的受电弓滑板裂纹检测方法[J].铁道学报,2014,36(5):58-63.
Algorithm for Overhead Catenary's Detection Based on High-resolution Image
YANGLuqiang,HANTongxin
(Locomotive & Car Research 1nstitute,China Academy of Railway Sciences, Beijing 100081, China)
This paper presents a new image recognition algorithm for identifying and locating the position of the overhead catenary system (OCS) based on pantograph HD camera in dynamic detect. And using the calibration parameters to calculate staggers and high conductivity. The algorithm is based on open source library opencv, It can adjust the parameters according to the environment, with a wide range of applications, as well as high accuracy. Experimental results show that the algorithm is practicable, which lays a foundation for its application in high-speed railway OCS geometric parameter dynamic measurement. And compared with traditional methods, it has some advantages.
OCS; image processing; geometric parameter detected;
��)男,研究实习员(
2016-04-21)
铁路供电技术
1008-7842 (2016) 05-0082-03
U225.1
A
10.3969/j.issn.1008-7842.2016.05.18
猜你喜欢
信息记录材料(2022年3期)2022-05-17
铁道机车车辆(2022年1期)2022-03-24
轨道交通装备与技术(2022年1期)2022-03-18
铁道学报(2020年8期)2020-09-07
哈尔滨铁道科技(2020年4期)2020-07-22
电子制作(2019年16期)2019-09-27
中国交通信息化(2019年4期)2019-07-13
电子制作(2018年19期)2018-11-14
电子制作(2018年14期)2018-08-21
铁道学报(2018年5期)2018-06-21