
基于ADAMS和MATLAB的两足机器人的步态联合仿真
2016-11-30 06:23曹杰昌张立中白杨杨
长春理工大学学报(自然科学版) 2016年5期
曹杰昌,张立中,2,白杨杨,2
(1.长春理工大学 机电工程学院,长春 130022;2.长春理工大学 空地激光通信国防重点学科实验室,长春 130022)
基于ADAMS和MATLAB的两足机器人的步态联合仿真
曹杰昌1,张立中1,2,白杨杨1,2
(1.长春理工大学 机电工程学院,长春 130022;2.长春理工大学 空地激光通信国防重点学科实验室,长春 130022)
为提高两足机器人的设计效率,降低设计成本,验证步态规划的正确性,在研制两足机器人物理样机前,应对其进行虚拟样机仿真。首先在ADAMS环境中建立简化的两足机器人动力学模型,然后在Matlab/Simulink中建立控制系统,最后利用二者之间的接口实现基于ADAMS和MATLAB的两足机器人的步态联合仿真,在仿真过程中观察两足机器人的行走过程,验证设计方案的正确性,为其物理样机的研制提供依据。
两足机器人;ADAMS;MATLAB;步态联合仿真
随着两足机器人的不断发展,其物理样机的投入成本以及机构设计的复杂性也不断增加,所以有必要对两足机器人进行虚拟样机仿真,以确定两足机器人的步态规划和步态控制算法的可行性,并可以对设计方法进行优化,还可能发现在物理样机研制中出现的问题,减少研发周期。ADAMS可以对运动模型在各种虚拟环境中进行真实的模拟,并进行分析,而MATLAB可以为运动模型提供控制系统,通过两者的联合仿真可以方便而真实的仿真两足机器人,为之后的物理样机研制提供数据依据[1]。
1 运动模型的建立
1.1 建立简化模型
按照两足机器人模型,每条腿配置6个自由度,包括:踝关节俯仰及滚动自由度;膝关节的俯仰自由度;髋关节的俯仰、滚动及偏转自由度[2](由于本文只研究了两足机器人的直线行走步态规划,所以髋关节的偏转自由度在下文中忽略不提)。由于在一些软件中建立的三维模型导入ADAMS中后可能出现数据丢失和参数修改不方便等问题,本文在ADAMS/View中直接建立简易的两足机器人下肢虚拟样机模型,其各零部件的质量、质心位置、转动惯量等物理参数可以根据实际参数进行相应设置[3],模型建立结果如图1所示,图中质量块用来调整两足机器人模型的质心位置,使模型在仿真过程中更加平稳。
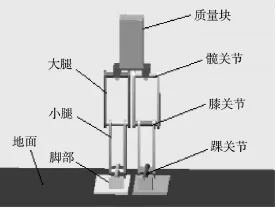
图1 虚拟样机模型
1.2 动力学建模
在建好的模型中相应的十个关节处建立转动副,为了使控制仿真的时候更加容易,给每个转动副添加摩擦力。在各个约束上添加驱动,并修改驱动类型为角位移,将MATLAB中生成的各关节角位移作为模型的输入状态变量,并通过函数变量与这些驱动相连接,控制机器人的各关节角位移,同时设定两足机器人输出状态变量为各关节角位移。利用ADAMS中的control模块生成与MATLAB联合仿真的接口文件。
在机器人两脚与地面建立接触力,并设置存在摩擦力,接触参数[4]如表1。可以通过调节接触力的各参数来仿真不同环境的运动。
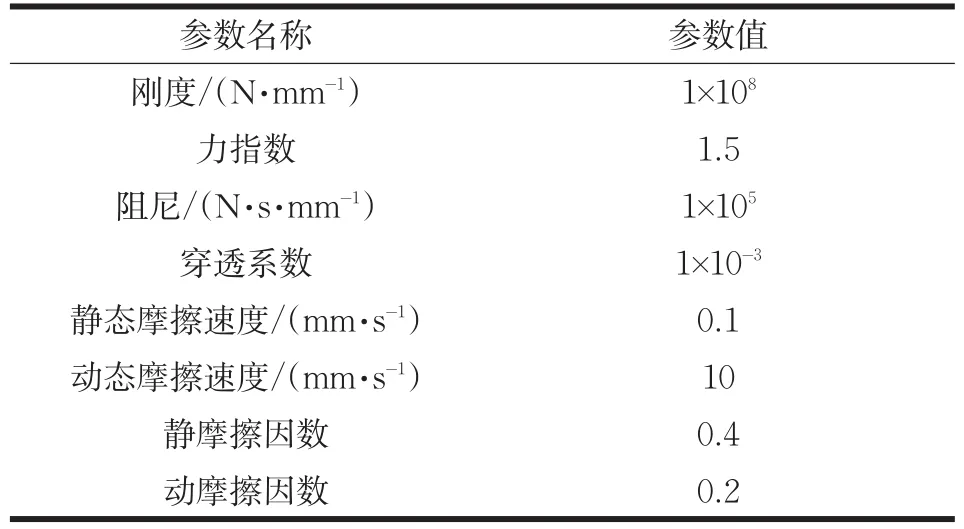
表1 接触参数表
2 步态规划
本文采用运动学逆解的方法来规划两足机器人的步态。首先规划双足机器人向前行走时质心的轨迹,为了使机器人能够稳定前行,需始终保持机器人的零力矩点(简称ZMP,是两足机器人所受重力、惯性力和地面反力三者合力矢的延长线与地面的交点)终位于由支撑脚掌所形成的凸形有效支撑区域内[5],所以将其质心的运动规划为倒立摆的运动;其次利用样条插值的方法规划脚踝关节的运动轨迹;最后结合质心的轨迹以及踝关节的轨迹,采用几何方法反解出两足机器人各个关节随时间转过的角度。
两足机器人在行走过程中需要规划从静态到平稳行走的起步步态,该步态结束时须确保机器人各关节角位移、角速度等与平稳步态开始时的相同。在两足机器人平稳行走后,每个步态周期分为两个单步周期,即左右腿各摆动一次,在每个单步周期中,分别规划支撑腿和摆动腿的步态,计算各关节的角位移,而且两足机器人的质心向支撑腿侧向移动半个周期。在下一个单步中,两足机器人的支撑腿和摆动腿与上个单步正好相反,而步态规律与上一个单步相同,机器人的质心同样向支撑腿侧向移动半个周期,而与上一个单步运动的方向相反。
3 控制系统设计
3.1 将接口文件导入MATLAB
将上文中生成的ADAMS和MATLAB的接口文件复制到MATLAB的工作路径,在MATLAB中运行接口文件,在窗口下输入adams_sys,得到在ADAMS中建立的两足机器人动力学模型的非线性系统。[6]
3.2 搭建控制系统
两足机器人各个关节采用单独控制。打开MATLAB中的Simulink模块,从工具库中挑选所需的模块,构建如图2所示的控制系统,控制系统中平稳行走时的仿真信号如图3。
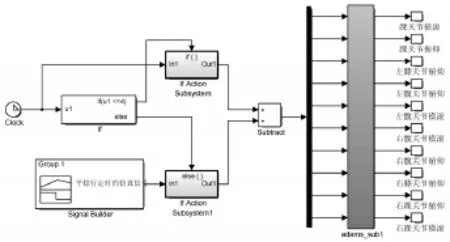
图2 控制系统
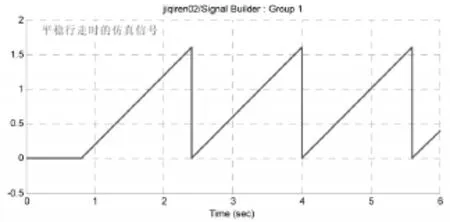
图3 平稳行走时的仿真信号
编写S-function来生成各个关节角度为ADAMS模块提供输入。双击控制系统中adams_sub模块,在Animation mode选项下选择interactive,方便在联合仿真时,进入ADAMS环境中实时观察两足机器人的运动情况。
4 仿真结果
仿真结束后可以在Matlab/Simulink中观察仿真结果曲线,也可以在ADAMS后处理模块(postprocess)观看仿真动画,并且可以计算出仿真过程中质心运动轨迹,各关节角位移等数据曲线。其中几个步态关键帧如图4所示。
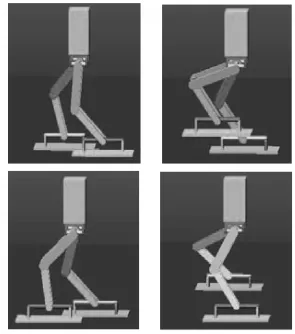
图4 步态关键帧
4.1 质心轨迹
从图5可以看出在机器人在运动过程中质心在侧向方向作单摆运动,其平衡位置在0.11m处,即为两足机器人两脚之间的中点处,当机器人一只脚开始离地后称为摆动脚,质心逐渐向另一侧支撑脚方向摆动,当摆动脚抬高到最大距离后,质心刚好摆动到支撑脚的正上方,使ZMP位于支撑脚所形成的有效支撑区域内的中心,确保两足机器人在行走时不会发生绕支撑脚边缘倾覆的现象。
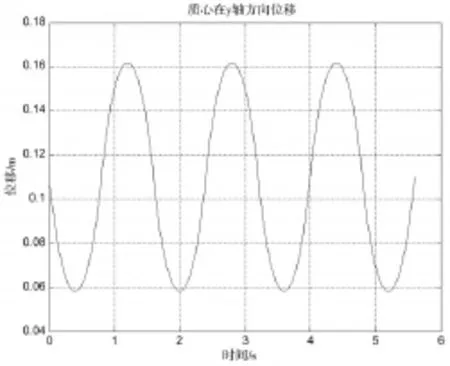
图5 质心在y轴方向的位移
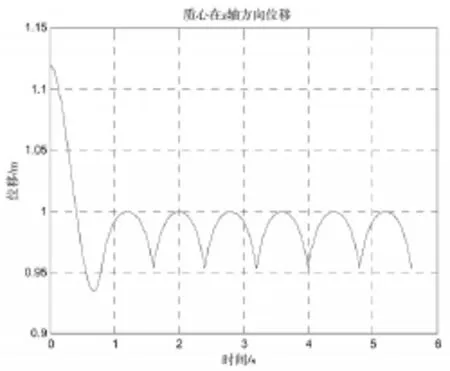
图6 质心在z轴方向的位移
从图6可以看出两足机器人在开始运动时质心高度为1.12m,由于在运动过程中支撑腿发生弯曲,形成支撑腿屈服0.12m长度的现象,所以在两足机器人稳定运行后质心最大高度下降到1m。同时可以看出质心在上下方向也作单摆运动,而且在每个单步中摆动一个周期。
4.2 各关节角位移
通过联合仿真观察ADAMS环境中两足机器人运动情况以及MATLAB中各关节的角位移,验证了步态规划的合理性。本文列出两足机器人其中一条腿主要关节在俯仰方向的角位移变化曲线,即踝关节俯仰角位移如图7,膝关节俯仰角位移如图8,髋关节俯仰角位移如图9。
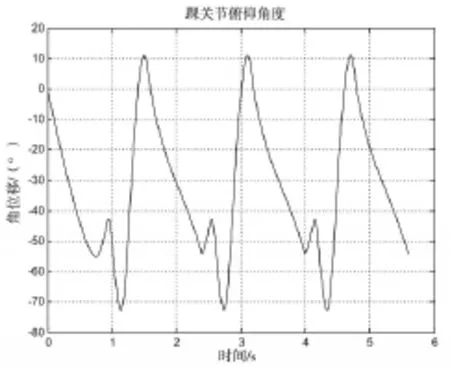
图7 踝关节俯仰角位移
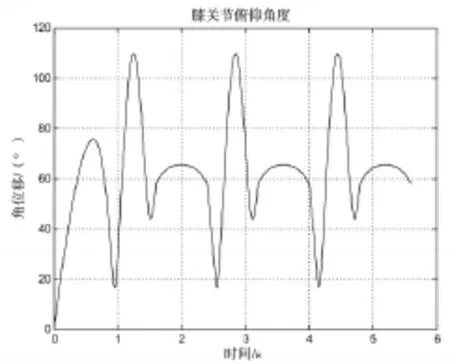
图8 膝关节俯仰角位移
图9 髋关节俯仰角位移
从三幅关节位移图可以看出各关节角位移从0开始经过起步后平稳过渡到稳定行走过程。在稳定行走过程中各关节角位移的和为零,保证了机器人在行走过程中上身保持直立,从而验证了步态规划的正确性。
5 结语
本文通过在ADAMS中建立两足机器人的虚拟样机,定义各个部件的材料和质量使其能够满足物理样机模型的参数,然后定义各种约束副、运动副,施加重力和接触力,用来模拟物理样机运动的真实环境,再建立与MATLAB联合仿真的接口。在MATLAB中建立控制系统,然后实现ADAMS与MATLAB的联合仿真,通过观察两足机器人虚拟样机的运动情况以及对各数据的分析验证步态规划的正确性,为物理样机的研制提供宝贵的理论依据。
[1] 史耀强,厉明勇,顿向明等.双足机器人基于ADAMS与MATLAB的联合仿真[J].机械与电子,2007(1): 45-47.
[2] 李敬,黄强,余张国等.人体步行规律与仿人机器人步态规划[J].中国科学,2012(9):42-9.
[3] 底剑豪.基于ADAMS的双足机器人运动仿真研究[D].保定:华北电力大学,2012.
[4] 安志亮,李卫国,王利利,蔡长亮等.基于ADAMS的仿人机器人步态仿真与分析[J].机械工程师,2015(4): 57-59.
[5] 柯显信.仿人形机器人双足动态步态研究[D].上海:上海大学,2005.
[6] 郑建荣ADAMS虚拟样机技术入门与提高[M].北京:机械工业出版社,2002.
Co-simulation of Gait for Biped Robot Based on ADAMS and MATLAB
CAO Jiechang1,ZHANG Lizhong1,2,BAI Yangyang1,2
(1.Institute of Mechatronical Engineering,Changchun University of Science and Technology,Changchun 130022;2.Fundamental Science on Space-Ground Laser Communication Technology Laboratory,Changchun University of Science and Technology,Changchun 130022)
In order to improve the efficiency,reduce the cost of biped robot design and verify the correctness of gait programming,virtual prototype simulation system has been built before developed the physical prototype of biped robot.First,the mechanical dynamic model of biped robot was built simplify in ADAMS.Second,the control systems ware built in Matlab/Simulink.Last,using the interface between them,we can realized the coordinated simulation of gait for biped robot based on ADAMS and MATLAB.Observed the walking of biped robot in the simulation process,verify the accuracy of the design,provide evidence for the development.
biped robot;ADAMS;MATLAB;co-simulation of gait
TP391.7
A
1672-9870(2016)05-0081-04
2016-05-04
曹杰昌(1990-),男,硕士研究生,E-mail:476818095@qq.com
张立中(1968-),男,教授,博士生导师,E-mail:zlzcust@126.com
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
中国特种设备安全(2022年4期)2022-07-08
机电信息(2021年17期)2021-07-01
装备制造技术(2020年4期)2020-12-25
内燃机与配件(2020年22期)2020-09-10
房地产导刊(2020年6期)2020-07-25
电子制作(2018年18期)2018-11-14
课程教育研究·学法教法研究(2018年14期)2018-08-11
自动化学报(2018年6期)2018-07-23
中国棉花(2017年10期)2017-11-04
