
激光跟踪仪靶球识别图像处理方法研究
2016-11-30 06:23马莹莹付跃刚劳达宝周维虎
长春理工大学学报(自然科学版) 2016年5期
马莹莹,付跃刚,劳达宝,周维虎
(1.长春理工大学 光电工程学院,长春 130022;2.中国科学院光电研究院,北京 100094)
激光跟踪仪靶球识别图像处理方法研究
马莹莹1,2,付跃刚1,劳达宝2,周维虎2
(1.长春理工大学 光电工程学院,长春 130022;2.中国科学院光电研究院,北京 100094)
激光跟踪仪是大型装备制造过程中的大尺寸精密测量仪器,在跟踪测量过程中,容易丢失目标,影响工作效率,无法继续跟踪。图像处理法对靶球进行目标识别,以实现靶球的断光续接。本文采用模板匹配和Hough变换两种方法,首先将图像处理技术应用于模板匹配,先对拍摄到的靶球进行不同的边缘提取法处理,然后再利用模板匹配法,提取目标靶球的中心坐标;其次利用Hough变换法求取并标定靶球中心坐标。通过对比不同方法提取到的目标的中心坐标,得到较为准确的提取方法,实现在脱靶后激光跟踪仪准确的跟踪目标。
激光跟踪仪;断光续接;图像处理;模板匹配;Hough变换
激光跟踪仪是大型装备制造过程中的大尺寸精密测量仪器,在跟踪测量过程中,当目标丢失时,影响工作效率,无法继续跟踪,需要在断光续接情况下实现快速续接。要解决激光跟踪仪的“断光续接”问题需要先对目标靶球进行识别。本文主要研究的是用图像处理方法识别目标靶球,即当激光跟踪仪在跟踪过程中丢失跟踪目标,造成脱靶现象时,对安装在激光跟踪仪上的相机拍摄的目标图像进行处理,识别出目标靶球,并提取其中心坐标,完成对目标靶球的识别。目前,在目标识别方面,国内外都有很多的研究,常用的是基于中心位置识别法对目标进行识别;基于HRRP的目标识别特征提取法对目标进行识别;基于不变量的局部描述算子的特征识别及匹配和基于统计学习方法的特征识别及匹配的;基于图像不变量提取目标特征进行目标识别的;基于改进的序列相似性检测算法和改进的均值移动算法进行目标识别和跟踪等[1-7]。
1 实验介绍
本文主要是为了提取目标靶球的中心坐标,目标提取系统的原理是:利用不同的方法找到目标靶球,并标定出其中心坐标。基于图像处理实现目标提取,本文利用两种方法提取目标靶球的中心坐标,方法一是先利用边缘检测算子提取边缘,常用的边缘检测算子有Sobel算子、Laplace算子、Canny算子,然后再利用模板匹配的方法标定出目标靶球并提取中心坐标;方法二是利用Hough变换的方法直接提取标定出目标靶球的中心坐标;找到目标靶球后调整控制系统,使激光跟踪仪继续跟踪目标。图1是激光跟踪仪提取目标靶球的流程图。
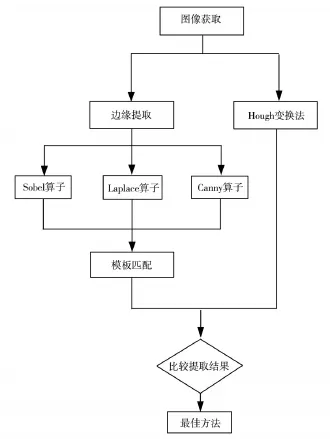
图1 靶球目标提取
2 目标提取
2.1 边缘检测模板匹配法
图像边缘提取是对输入的图像进行一系列处理变换,使要处理的目标边缘更加突出。图像预处理环节在很大程度上影响最终模板匹配的正确率,图像的清晰度往往由于自然因素或者设备因素等的限制而导致不理想,为后续的匹配带来严重影响,甚至可能造成匹配错误,无法准确提取目标靶球。因此,边缘提取的效果一定程度上影响到提取靶球中心的正确率,影响靶球目标跟踪定位系统的准确性。
2.1.1 边缘检测
目前,提取靶球目标常用的边缘检测方法有三种:Sobel算子边缘检测法、Laplace算子边缘检测法和Canny算子边缘检测法。
Sobel算子边缘检测法就是利用Sobel算子和拍摄的含有目标靶球的图像作平面卷积,求得相应的亮度差分近似值,即找到有差异的相邻的像素,并增加其对比度,这些有差异的像素对应的就是目标靶球的边缘信息[13]。Sobel算子利用快速卷积函数,是用于边缘提取的主要滤波算子,该算子由于简单有效,应用广泛。但是由于Sobel算子并没有彻底的将图像的背景和主题严格的区分开来,因此提取的图像轮廓很多时候不是令人很满意的[13]。
Laplace算子边缘检测法就是利用Laplace算子和拍摄的含有目标靶球的图像做卷积,得到的边缘像素就是二阶梯度图像产生零交叉时的位置对应的像素,也就是目标靶球的边缘信息。一幅图像中某一个较暗的区域内如果有一个亮点,那么使用拉普拉斯运算就会使得该亮点变得更为明亮[14]。因为图像中那些灰度发生跳变的区域,就是图像的边缘,因此在图像边缘检测中,拉普拉斯瑞华模板是很有用的。Laplace算子由于采用了二阶导数,抗噪能力比较差,拉普拉斯对噪声敏感,会产生双边效果,不能检测出边的方向。因此,通常只是用来起到辅助的角色,检测某一像素是在边缘的亮的一侧还是暗的一侧,而不直接用于边缘检测;或者该方法只是用来确定边缘的位置。
Canny算子边缘检测法是首先用高斯滤波器平滑含有目标靶球的图像,然后用一阶偏导有限差分计算相关的梯度幅值和方向,再接着就是对梯度幅值进行非极大值抑制,最后对边缘的检测和连接利用的是双阈值算法,即可标记出目标靶球的边缘信息[15]。Canny算子提取的边缘线性连接程度很好,而且对边缘提取的完整度也很好,边缘线很细腻,因此Canny算子是很不错的局部极值边缘检测。
2.1.2 模板匹配
模板匹配是一种有效的模式识别技术,它能利用图像信息和有关识别模式的先验知识,更加直接的反应图像之间的相似度。模板是一幅已知的小图像,本文的模板就是经过边缘检测后的图像中的目标靶球,模板匹配就是在边缘检测处理后的图像中找寻目标靶球。已知在边缘检测后的图像中含有要寻找的目标靶球,且该目标靶球图像与模板靶球图像具有相近的尺寸和方向,通过一定的算法可以在图中找到目标靶球,并确定其中心坐标的坐标位置[8-9]。
本文中所采用的模板匹配就是利用传统的模板匹配算法,搜索子窗口步长为1,依次逐步进行遍历整幅图像,计算整幅搜索子图与目标靶球的相关系数,简单的说,就是选取目标靶球为模板,然后与边缘处理后的图像每个搜索子窗口进行对比,算出其相关系数,设置阈值为T,当相关系数大于阈值T时,说明匹配成功;当相关系数小于阈值T,说明未能匹配上。
2.2 Hough变换
Hough变换的基本原理在于,利用点与线的对偶性,将图像空间的线条变为参数空间的聚集点,从而检测给定图像是否存在给定性质的曲线[16]。试验中,由于靶球半径在图像中是变化的,因此就相当于是在图像中找半径和圆心都未知的圆,把参数平面扩大为三维空间,即x-y-R三维。采用参数方程x=a+rcosθ,y=b+rsinθ,这样图
像平面上的一个点就对应到参数平面的一条曲线上。图像边缘除了位置信息外,还有同样很重要的方向信息,根据圆的性质,圆的半径位于圆上任意一点的法线之上,即垂直于圆的切线的直线上[16]。因此,我们仍采用的是2维的参数空间,圆图像空间中的一个圆对应到参数空间中的某一个点,参数空间中的一个点对应到图像空间中就是一个圆,圆图像空间中在同一个圆上的点,它们的参数时相同的,即a,b相同,那么在参数空间中都过同一个点(a,b)那么对应图像空间中就是同一个圆,因此,可以根据原图像空间中的所有点变换到参数空间后,参数空间中的点的聚集程度来判断图像空间中是不是近似的圆。如果有的话,这个参数就是圆的参数[17]。
3 实验
本文采用了边缘检测模板匹配法和Hough变换法两种不同的方法提取目标靶球的中心坐标。其中边缘检测模板匹配法利用不同的图像预处理发对不同背景光下拍摄的图像进行预处理,提取靶球的边缘,然后利用模板匹配法确定目标靶球的位置,提取其中心坐标;Hough变换法则是利用Hough变换提取目标靶球的外圆轮廓,标定圆心坐标,即靶球的中心坐标。比较这两种方法提取到的靶球的中心坐标的准确性,最终选出最为合适的靶球中心坐标提取法。
3.1 模板匹配法
(1)Sobel算子边缘检测法
利用Sobel算子对不同背景下图像进行预处理,提取靶球中心坐标,结果如图2所示,图2(a)和图2(b)分别为不同背景下拍摄的靶球目标,利用Sobel算子对图像进行预处理,提取靶球目标,利用模板匹配法对靶球目标进行中心坐标提取分别得到图2(c)和图2(d)。
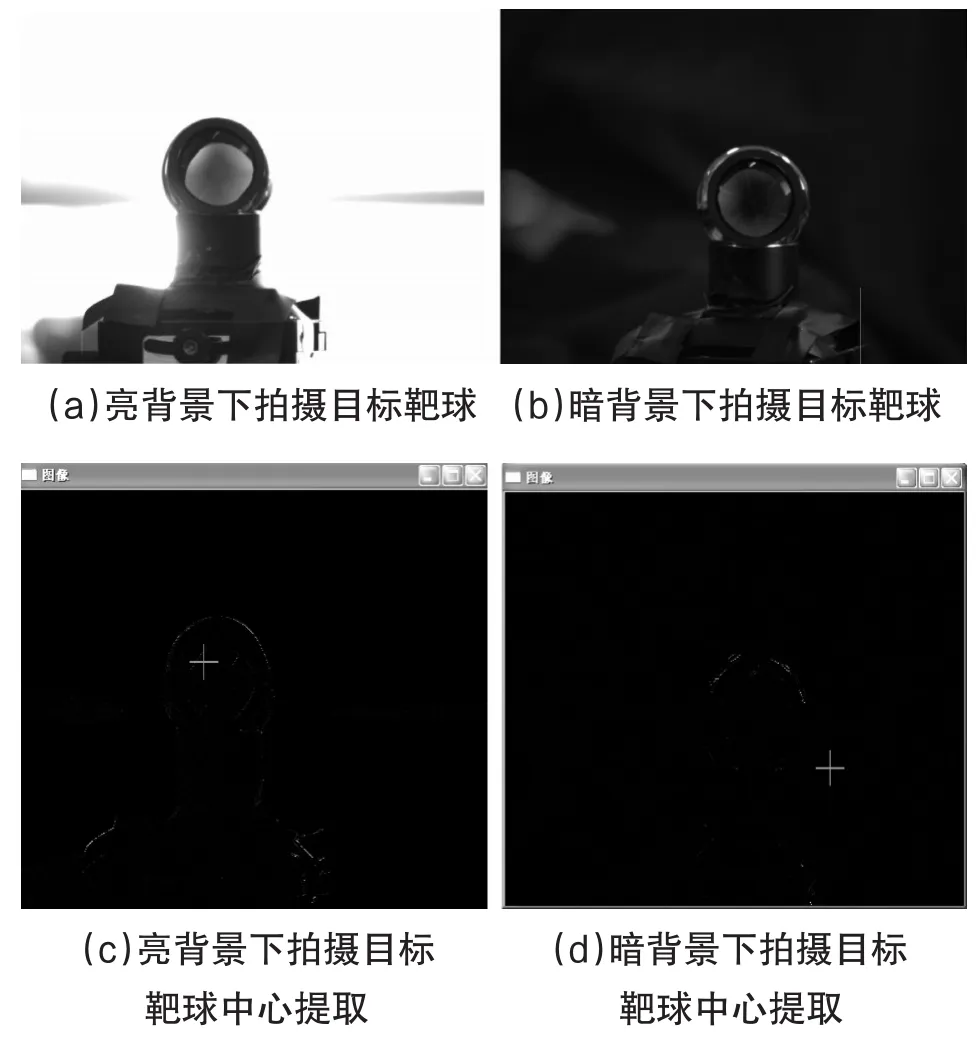
图2 Sobel算子处理图像结果
Sobel边缘检测法后,利用模板匹配法提取靶球目标中心坐标,结果如表1所示:
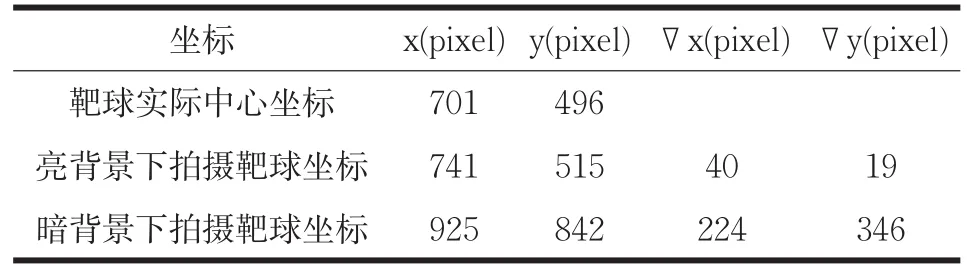
表1 Sobel边缘检测法处理后提取的靶球中心坐标
Sobel算子检测边缘的原理是是像素点上下、左右邻点灰度值加权,在边缘点达到极大值。Sobel算子检测边缘能够平滑噪声,能够精确的判断边缘方向的信息,但是边缘定位的精度不是很高。因此,当对定位精度要求不高的时候,可以利用Sobel算子检测边缘进行处理。
(2)Laplace算子边缘检测法
利用Laplace算子对不同背景下图像进行预处理,提取靶球中心坐标,结果如图3所示,图3(a)和图3(b)分别为不同背景下拍摄的靶球目标,利用Laplace算子对图像进行预处理,提取靶球目标,利用模板匹配法对靶球目标进行中心坐标提取分别得到图3(c)和图3(d)。
Laplace算子处理后,利用模板匹配法提取靶球目标中心坐标,结果如表2所示。
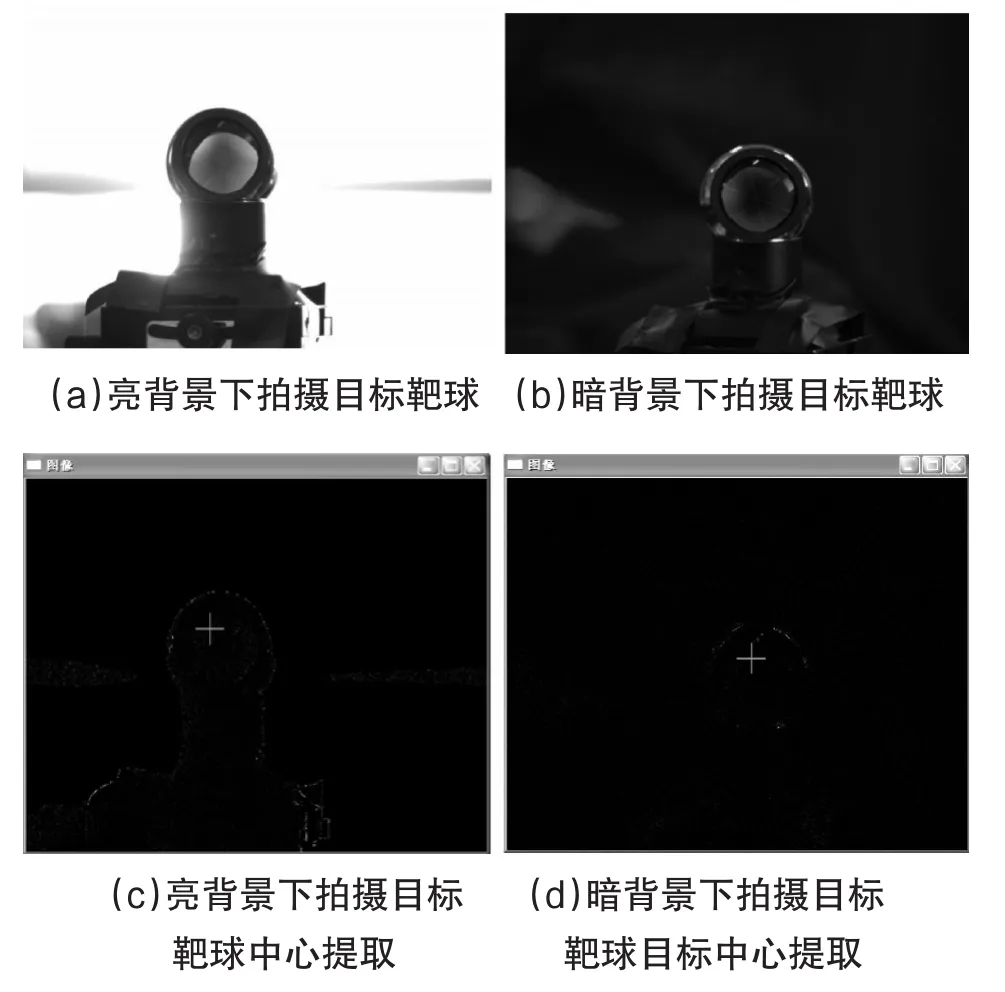
图3 Laplace算子处理图像结果
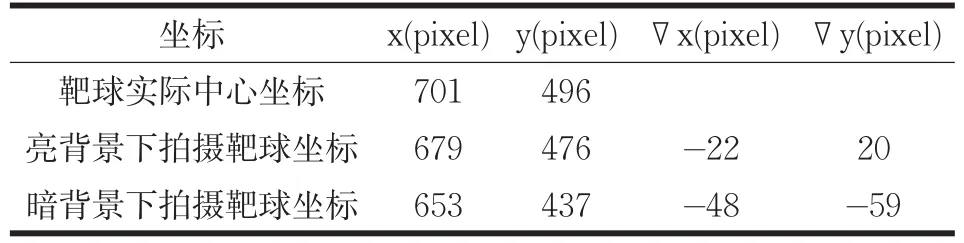
表2 Laplace算子处理后提取靶球中心坐标
(3)Canny算子
利用Canny算子对不同背景下图像进行预处理,提取靶球中心坐标,结果如图4所示,图4(a)和图4(b)分别为不同背景下拍摄的靶球目标,利用Canny算子对图像进行预处理,提取靶球目标,利用模板匹配法对靶球目标进行中心坐标提取分别得到图4(c)和图4(d)。
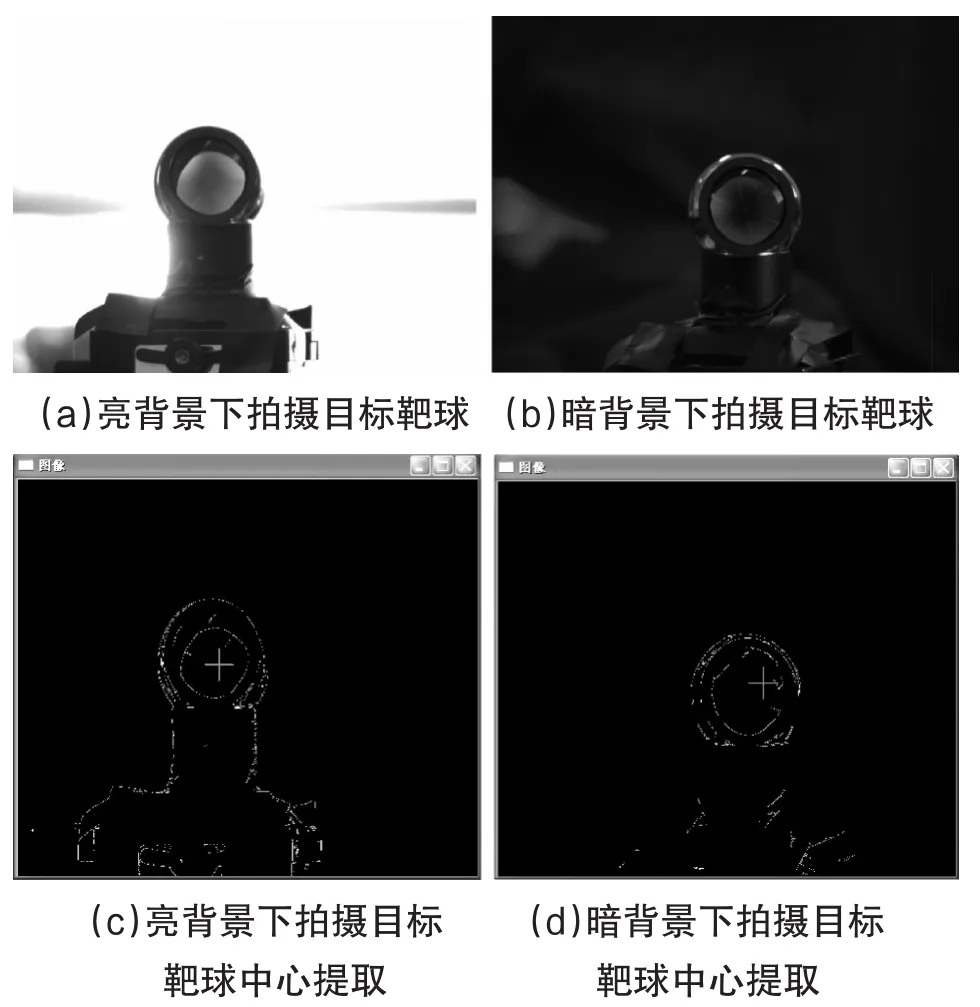
图4 Canny算子处理图像结果
Canny算子处理后,利用模板匹配法提取靶球目标中心坐标,结果如表3所示:
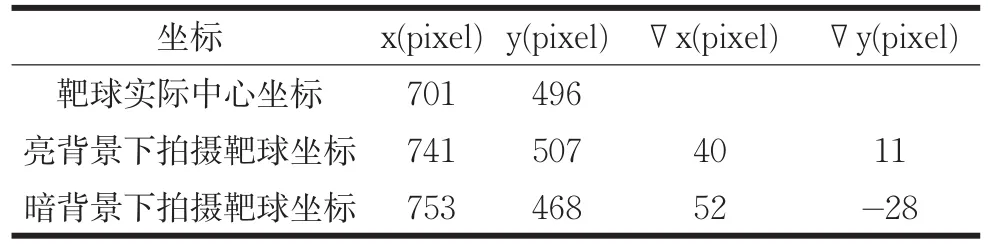
表3 Laplace算子处理后提取靶球中心坐标
Canny算子在提高对景物边缘的敏感性的同时,可以抑制噪声的方法才是好的边缘提取,但是由于采用的是不同背景下的同一模板,在匹配的时候难免出现误差,提取出的靶球的中心坐标仍然不是最佳。
3.2 Hough变换
利用霍夫变换提取目标靶球圆的外轮廓,然后标定出圆心坐标,即为靶球的中心坐标,为避免场景中还有其他圆导致目标提取错误,考虑靶球直径的因素,设置圆的半径为1.2cm~1.7cm。结果如图5所示,图5(a)和图5(b)分别为不同背景下拍摄的靶球目标,图5(c)和5(d)为利用霍夫变换提取出的目标把球对应的外圆,图5(e)和图5(f)为标定出目标靶球的外圆的圆心坐标,即靶球的中心坐标。
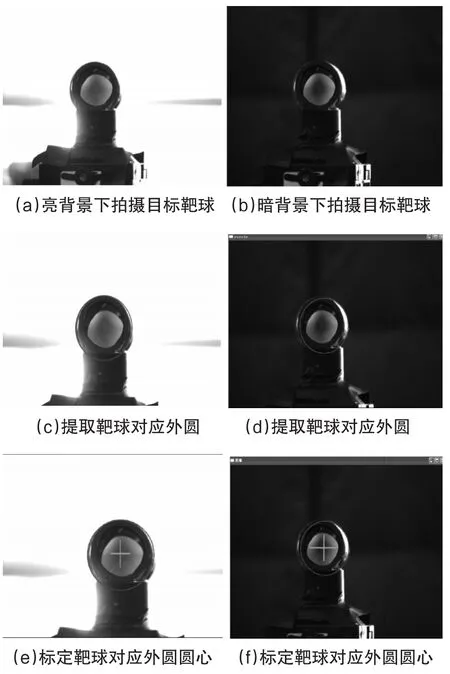
图5 Houg变换提取目标靶球
Hough变换求取靶球中心坐标,结果如表4所示。
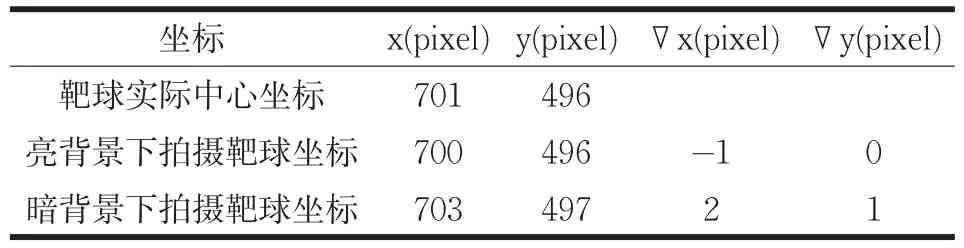
表4 Hough变换提取的靶球中心坐标
再进行多次实验验证,最后得到Hough变换法标定靶球的中心坐标,误差均很小。
3.3 实验结果分析
以上实验结果表明,边缘检测模板匹配法均存在不同的误差,对相同环境,但是不同自然光条件下拍摄的图像进行边缘检测处理,并进行模板匹配,对得到的多组数据进行处理,计算得到的靶球中心坐标到实际目标靶球中心坐标的距离,如图6所示:
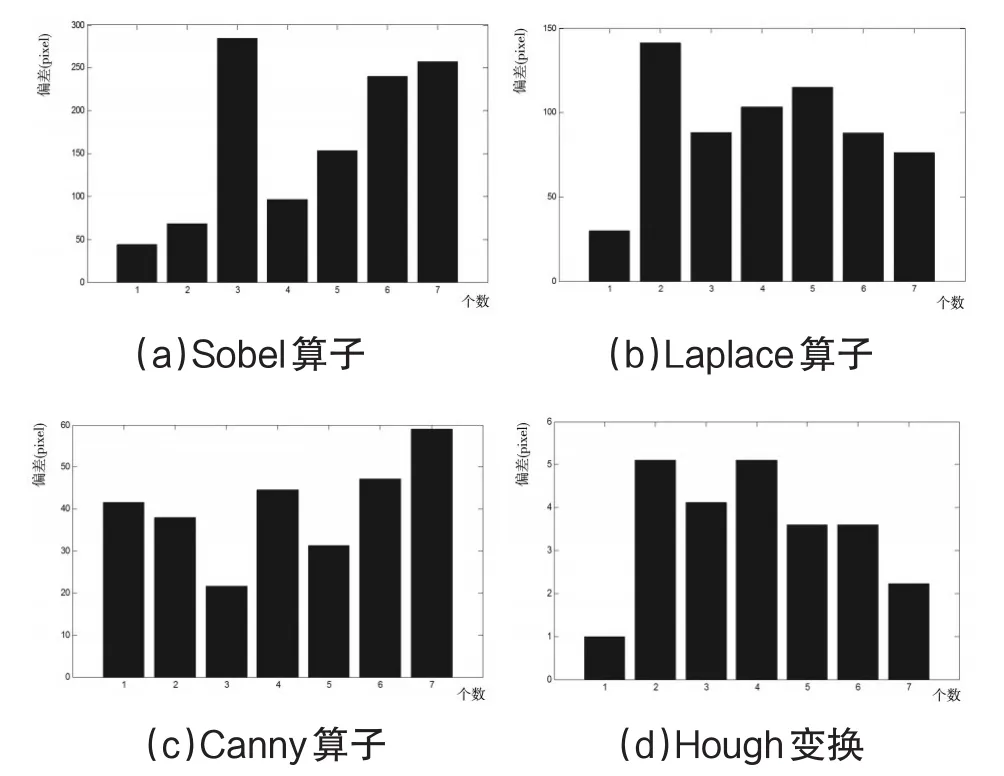
图6 实验求得靶球中心坐标和实际靶球中心坐标的偏差
选取靶球坐标的个数,纵坐标表示用这几种方法得出的靶球的中心坐标得到的和靶球实际中心坐标的偏差。实验中,Sobel算子预处理得到靶球中心坐标和实际靶球中心坐标的偏差的范围是45-280pixel,Laplace算子预处理得到靶球中心坐标和实际靶球中心坐标的偏差的范围是25-145pixel,Canny算子预处理得到靶球中心坐标和实际靶球中心坐标的偏差的范围是22-45pixel,Hough变换预处理得到靶球中心坐标和实际靶球中心坐标的偏差的范围是1-5pixel,通过比较纵坐标的值可知,Hough变换法所得到的靶球中心坐标和实际靶球中心坐标的距离偏差最小。
4 结论
本文通过对比图像预处理法和Hough变换法提取目标靶球中心坐标,实验结果表明,利用Sobel算子,Laplace算子和Canny算子预处理图像,然后利用模板匹配法提取的靶球中心坐标,均存在很大误差,而Hough变换能够相对精确的提取目标靶球的中心坐标。因此,Hough变换法作为提取目标靶球中心坐标的一种常用方法,并将其应用于激光跟踪仪对目标靶球的跟踪实验,能够实现在脱靶后激光跟踪仪准确的跟踪目标。
[1] 吴纪超.机器视觉图像中目标识别提取算法研究[D].保定:河北农业大学,2010.
[2] 冷家旭,惠明,龙方.基于高分辨距离像的目标识别技术发展现状与趋势[J].飞行器测控学报.2010,29(3): 79-83.
[3] 李珍.基于特征匹配的目标识别与定位方法研究[D].广州:南方医科大学,2012.
[4] 朱旭锋.基于图像不变量特征的自动目标识别技术研究[D].西安:中国科学院西安光机所,2012.
[5] 邢卓异.基于图像的目标识别与跟踪方法研究[D].哈尔滨:哈尔滨工程大学,2007.
[6] 涂铮铮.视频分割和运动目标提取方法研究[D].合肥:安徽大学,2007.
[7] 贺丽丽.视频序列中运动目标提取方法[D].西安:西安电子科技大学,2014.
[8] 唐琎,李青.一种快速的模板匹配算法[J].计算机应用.2010,30(60):1559-1564.
[7] 栾柱晓,唐琎,郑群英.一种改进的人眼模板匹配算法[J].计算机系统应用,2009,18(12):75-78.
[8] 杨枝灵,王开.Visual C++数字图像获取处理及实践应用[M].北京:人民邮电出版社,2003.
[9] 贾永红.计算机图像处理与分析[M].武汉:武汉大学出版社,2001.
[10] 沈庭芝,方子文.数字图像处理及模式识别[M].北京:北京理工大学出版社,1998.
[11] 沈德海,侯建,鄂旭.基于改进的Sobel算子边缘检测算法[J].计算机技术与发展,2013,23(11):22-25.
[12] 黄剑玲,邹辉.基于高斯Laplace算子图像边缘检测的改进[J].微电子学与计算机,2007,24(9):155-161.
[13] 许宏科,秦严严,徐会茹.一种基于改进Canny边缘检测算法[J].红外技术,2014,36(3):210-214.
[14] 王菁菁,范影乐.基于Hough变换的圆检测技术[J].杭州电子科技大学学报,2005,25(4):62-65.
[15] 赵京东.用两步Hough变换检测圆[J].计算机应用,2008,28(7):1761-1763.
The Image Processing Method of Laser Tracker Target Recognition
MA Yingying1,2,FU Yuegang1,LAO Dabao2,ZHOU Weihu2
(1.School of Optoelectronic Engineering,Changchun University of Science and Technology,Changchun 130022;2.Academy of Optoelectronics,Chinese Academy of Sciences,Beijing 100094)
Laser tracker is a large size precision measuring instruments for large scale equipment manufacturing process. In the process of tracking measurement,it is easy to lose the target,and affects the efficiency of the work,making it unable to continue tracking.In this paper,image processing method for target recognition of target ball is used in order to achieve the target ball when it is break off liaght.We use two methods which are the template matching and Hough transform.First of all,the image processing technique is applied to template matching.Firstly,we use different edge extraction methods to deal with target ball by shot,and then use the template matching method to get the center coordinates of the target ball;Next we will use Hough transform method to get and demarcate the center coordinates of the target ball.By comparing the different methods which are used to get the center coordinates of the target ball,we will get the most accurate extraction method,and get the accurate tracing of laser tracker on target to achieve the goal after miss.
laser tracker;break off light;image processing;template matching;Hough transform
TP751
A
1672-9870(2016)05-0035-05
2016-03-16
马莹莹(1989-),女,硕士研究生,E-mail:mayingying0928@163.com
周维虎(1962-),男,教授,博士生导师,E-mail:zhouweihu@aoe.ac.cn
猜你喜欢
数学物理学报(2022年5期)2022-10-09
温州大学学报(自然科学版)(2022年2期)2022-05-30
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年1期)2021-03-29
应用数学(2020年2期)2020-06-24
制导与引信(2017年3期)2017-11-02
通信产业报(2016年44期)2017-03-13
工业设计(2016年11期)2016-04-16
海军航空大学学报(2015年4期)2015-02-27
雕塑(1999年2期)1999-06-28
