
轮驱电动汽车转矩协调控制研究
2016-11-26 07:51呼梦颖
微特电机 2016年8期
张 辉,呼梦颖,刘 桓
(1.西安理工大学,西安 710048;2.西安交通大学,西安 710049)
轮驱电动汽车转矩协调控制研究
张 辉1,2,呼梦颖1,刘 桓1
(1.西安理工大学,西安 710048;2.西安交通大学,西安 710049)
针对轮驱电动汽车转速控制稳定性较差和动态响应时间长的问题,设计以转矩为控制量的电子差速协调控制策略,构建仿真模型和以TMS320F28335为核心的集成化驱动装置,实现轮驱电动汽车转矩合理分配,验证方案的可行性。
轮驱;电动汽车;电子差速
0 引 言
轮式驱动(简称轮驱)电动汽车将电机与车轮集成,省去机械传动装置,减轻汽车重量,提高传动效率和续驶里程[1-2]。每个驱动电机可以独立控制,用电子差速(以下简称ED)装置取代机械差速装置,但关键是必须解决各驱动轮之间的协调控制[3]。
文献[4-5]设计基于滑模控制理论的横摆力矩控制器分配各驱动轮转矩,该控制策略复杂,需用传感器或估算方法获得横摆角速度和质心侧偏角等参数。文献[6]采用神经网络PID控制器计算驱动轮目标转矩,该控制策略只能针对神经网络训练过的路面进行控制,通用性不强。文献[7]中电机的转矩控制环由电流环实现,该控制策略需通过实验数据确定电机转矩与电流的转换关系,控制精度低,动态响应较差。
论文采用外转子式无刷直流电动机(以下简称BLDCM)作为驱动电机,以普通路面行驶时两轮附着率相等为目标,设计需求参数较少、通用性较强、易于工程化的ED与BLDCM直接转矩控制(以下简称DTC)结合的转矩协调控制策略,构建集成电子差速控制和电机控制的驱动装置,实现转矩合理分配。
1 结构与转矩协调控制策略
1.1 轮驱电动汽车结构
轮驱电动汽车采用前轮转向、双后轮驱动结构,主要包括蓄电池、BLDCM和控制器,结构如图1所示。控制器根据加速踏板开度和转向盘转角,判断行车意图,实时调节两电机的输出转矩。因此,两驱动电机的转矩协调控制是算法的核心。

图1 轮驱电动汽车结构图
1.2 转矩协调控制策略
转矩协调控制策略分为上层控制和下层控制。上层控制综合考虑加速踏板开度和转向盘转角,确定两驱动轮的目标转矩;下层控制确保电机转矩跟随目标转矩,实现动力输出。转矩协调控制框图如图2所示。
协调控制策略将ED与DTC结合,构成转速、转矩双闭环,外环是包含驾驶员的速度环,内环是包含DTC的转矩环。ED控制器根据采集的加速踏板开度和转向盘转角,实时计算两驱动轮的目标转矩,作为转矩闭环的参考值。

图2 转矩协调控制框图
1) ED控制
策略采用以转矩为控制量的ED算法,保证汽车转向时两驱动轮的附着率相等。
若两驱动轮附着率相等,则左右驱动轮的转矩比和垂直载荷比相等[9],即:
(1)
左右驱动轮转矩之和满足:
(2)

(3)
2) BLDCM控制
BLDCM控制策略采用无磁链观测DTC[10],主电路拓扑采用三相全桥逆变电路,三相六状态、两两导通模式[11],电压空间矢量分布如图3所示。

图3 BLDCM电压空间矢量分布
根据定子磁链所处扇区和转矩滞环比较器的输出选择电压空间矢量,开关表如表1所示。
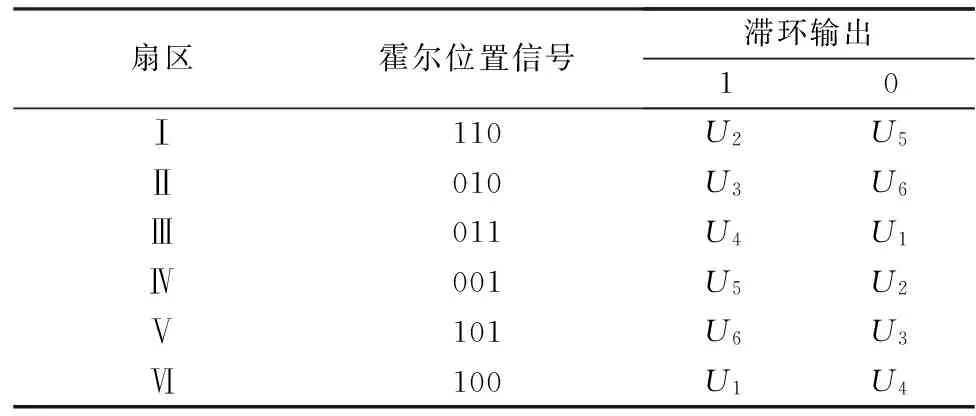
表1 电压空间矢量开关表
2 驱动装置构建
2.1 硬件平台
以TMS320F28335为核心构建驱动装置,硬件结构框图如图4所示。驱动装置根据加速踏板开度和转向盘转角,协调控制两驱动轮的输出转矩,实现电动汽车前进、后退、转向及制动。

图4 驱动装置结构框图
2.2 软件流程
软件程序主要包括换相、ED转矩分配、转矩观测、滞环调节等模块,主程序流程图如图5所示。

图5 主程序流程图
读取前进/后退信号,调用相应的换相程序;采集加速踏板开度和转向盘转角,通过ED策略分配左右驱动轮的目标转矩,结合观测的反馈转矩进行滞环调节;若发生转子位置信号跳变,则产生换相中断,执行换相中断子程序。
3 仿真和实验分析
3.1 仿真分析
在MATLAB/Simulink中构建汽车动力学与BLDCM结合的整车模型并进行仿真分析。
汽车主要参数:质量800 kg;车体质心到前轴的距离a=1 200 mm;轮距B=1 400 mm;车体质心高度h=0.3 m;车轮半径0.255 m。
BLDCM主要参数:额定功率3 kW×2;额定电压96 V;极对数23;额定转速1 500 r/min。
定义汽车左转时,转向盘转角和前轮转角为正。电动汽车以20 km/h行驶,转动转向盘从0°至120°(前轮转角从0°至10°)后回正,转向盘转角和电机转矩波形如图6所示。

图6 转向盘转角和转矩仿真波形
直线行驶时,两电机转矩相等,约为16.2 N·m;左转时,内电机(左电机)转矩减小,外电机(右电机)转矩增加,当转向盘转角为120°时,内电机转矩约为13 N·m,外电机转矩约为19.4 N·m;方向盘回转,内电机转矩回升,外电机转矩下降,直至转向盘完全回正,两电机输出转矩相等,恢复直线行驶。
3.2 实验分析
以TMS320F28335为核心,构建轮驱电动汽车集成化驱动装置,实验参数和仿真参数一致。
轮驱电动汽车在转向盘120°转角行驶时,两电机A相电流在4~4.5 s间的放大波形如图7。由电机电流计算得出,外电机转矩约为19.7 ,内电机转矩约为13.8 ,外驱动轮输出转矩大于内驱动轮;外电机电流频率约为13.3 Hz,内电机电流频率约为11.8 Hz,计算得出外驱动轮转速约为219.5 r/min,内驱动轮转速约为197.2 r/min,外驱动轮转速高于内驱动轮,实现差速功能。换相期间,由于关断相(B相)电流下降速度和开通相(C相)电流上升速度不相等,恒导通相(A相)电流发生畸变,引起转矩脉动。

图7 转向行驶时驱动电机A相电流波形
转动转向盘从0°~120°后回正,电机转矩波形如图8所示。汽车以20 km/h直线行驶时,内外电机转矩相等,约为16.4 N·m;转向行驶时,内电机转矩减小,外电机转矩增加,当转向盘转角为120°时,内电机转矩约为13.8 N·m,外电机转矩约为19.7 N·m,与依据电流计算出的转矩一致;转向盘回正后内外电机转矩相等,恢复直线行驶。

图8 转矩实验波形
4 结 语
采用ED与DTC结合的转矩协调控制策略,以TMS320F28335为核心,构建集成电子差速控制和电机控制的轮驱电动汽车驱动装置。仿真和实验结果表明,控制策略可以实现转矩合理分配,方案是可行的。
[1] 余卓平,冯源,熊璐.分布式驱动电动汽车动力学控制发展现状综述[J].机械工程学报,2013,49(8):105-114.
[2] 向奎,卢刚,李声晋,等.四轮毂电机代步车控制系统设计[J].微特电机,2013,41(6):60-63.
[3] YIN D,OH S,HORI Y.A novel traction control for EV based on maximum transmissible torque estimation[J].IEEE Transactions on Industrial Electronics,2009,56(6):2086-2094.
[4] 张金柱,张洪田,孙远涛.电动汽车稳定性的横摆力矩控制[J].电机与控制学报,2012,16(6):75-80.
[5] 王强,王耘,宋小文.基于差动驱动的电子差速控制方法研究[J].机电工程,2011,28(6):698-703.
[6] LI Zhai,DONG Shouquan.Electronic differential speed steering control for four in-wheel motors independent drive vehicle[C]//Proceedings of the 9th World Congress on Intelligent Control and Automation,June 21-25,2011,Taipei,IEEE,2011:780-783.
[7] 郭龙舟,张辉,支娜,等.基于单控制器的轮驱电动汽车驱动装置研究[J].电气传动,2013,43(12):61-64.
[8] HADDOUN A,BENBOUZID M E H,DIALLO D,et al.Modeling,analysis and neural network control of an EV electrical differential[J].IEEE Transactions on Industrial Electronics,2008,55(6):2286-2294.
[9] 葛英辉.轮式驱动电动车控制系统的研究[D].杭州:浙江大学,2004.
[10] 安群涛,孙立志,刘超,等.无刷直流电机的磁链自控直接转矩控制[J].中国电机工程学报,2010,30(12):86-92.
[11] 张辉,李金祁,蔡聪朝,等.采用单电阻电流采样的EPS无刷直流电机的控制[J].电气传动,2011,41(7):13-16.
Research on Torque Coordination Control for Electric Vehicles Driving In-Wheel
ZHANGHui1,2,HUMeng-ying1,LIUHuan1
(1.Xi'an University of Technology, Xi'an 710048, China;2.Xi'an Jiao Tong University, Xi'an 710049, China)
Considering poor stability and long dynamic response time of electric vehicle driving in-wheel based on speed, electronic differential coordination control strategy was designed based on torque. Simulation model and integrated drive device based on TMS320F28335 were established to achieve reasonable torque distribution. The results prove the method was feasible.
driving in-wheel; electric vehicle; electronic differential
2014-11-24
国家自然科学基金项目(51277150,51307140);陕西省工业攻关项目(2013K07-05);陕西省教育厅产业化培育项目(14JF020);电力设备电气绝缘国家重点实验室开放基金项目(EIPE12209);陕西省重点学科建设专项资金项目(105-7075X1301)
TM33
A
1004-7018(2016)08-0067-03
张辉(1963- )男,博士,教授,博士生导师,主要研究方向为新型电能储存装置与电动汽车控制等。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
中国新技术新产品(2020年4期)2020-05-05
模具制造(2019年10期)2020-01-06
解放军健康(2017年5期)2017-08-01
自动化学报(2017年4期)2017-06-15
科技创新导报(2016年27期)2017-03-14
探测与控制学报(2015年4期)2015-12-15
中国塑料(2015年3期)2015-11-27
