
基于整车行驶稳定性的电机故障和同步控制分析
2016-11-26 07:51景玉军
微特电机 2016年8期
景玉军
(中山职业技术学院,中山 528400)
基于整车行驶稳定性的电机故障和同步控制分析
景玉军
(中山职业技术学院,中山 528400)
电驱动平地机行驶路况复杂,行驶过程中时常会出现部分电机发生通讯或系统故障,需要在驱动控制过程中采用主动的故障控制机制,以确保车辆安全行驶。当平地机在两侧附着系数相差较大的路面行驶时,易出现单侧驱动轮过度滑转和偏载工况。针对以上问题,基于整车行驶稳定性,对电机故障控制和同步控制策略进行分析,制定了电机故障工况各轮驱动转矩再分配的安全控制解决方案。利用Simulink搭建故障控制器和同步控制器模型,分析故障工况对整车行驶性能的影响。结果表明:故障和同步控制提高了车辆故障行驶的稳定性和通过性。利用设计的故障和同步控制器对车辆在对开路面加速过程的打滑工况进行分析,分析车轮打滑对整车行驶性能的影响,同步控制提高了有效驱动功率,增强了整车通过性和稳定性。
六轮电驱动平地机;牵引电机;故障控制;同步控制;行驶稳定性;通过性
0 引 言
平地机(Grader)是用于路面整形作业的工程机械,根据其低速大扭矩作业、高速转场和偏载同步控制等工作特性需求,电传动控制表现出明显的优势,而且电传动具有更高的工作效率,因此电传动平地机发展迅速。原地平地机采用六轮驱动,具有前轮转向和铰接转向的复合转向特性,各轮之间没有机械差速器连接,牵引电机与动力源之间采用电缆连接,当部分电机发生故障时,会对正常行车造成一定的影响和危害,要解决应对故障的行车控制问题[1]。当平地机行驶于两侧附着系数相差较大的路面或铲刀外移偏载作业时,容易出现单侧轮过度滑转,导致整机失去作业同步性。使得整机牵引功率下降,加剧轮胎的磨损,影响工作效率和整机寿命。因此,对其点传动系统进行分析,研究电机故障和同步控制策略,充分利用多轮独立控制的特点,对各轮牵引电机进行单独调节,满足平地机不同工况要求。
针对多轮电驱动车辆控制,国内外学者进行了一定的研究。文献[2]基于车载网络技术提出了一种包括车体运动控制层和控制力分配层的整车集成控制框架;文献[3]研究适用于多轮独立驱动车辆的动力学分层集成控制方法,上层采用非线性滑模控制器得到整车纵向力、侧向力和横摆力矩;控制分配层采用广义逆计算方法将整车力和力矩转化为各轮纵向滑移率和侧偏角;文献[4]研究了独立驱动电动汽车的防滑和稳定性控制技术,针对四轮驱动电动汽车提出了一种防侧滑的控制方法,仅通过检测电动机的电流和转速来检测车轮的滑动状态;文献[5]针对四轮独立驱动电动车提出了分层结构的驱动力分配算法,改善车辆在湿滑路面或转弯工况下的操纵性和稳定性;文献[6]研究了直接横摆力偶矩(DYC)控制系统,通过对内外轮转矩的实时分配控制,改善车辆操纵稳定性。
针对六轮独立驱动平地机的特点,分析牵引电机故障对车辆驱动特性的影响,针对平地机在低附着路面行驶或偏载作业时出现的打滑工况,结合其转向行驶运动学分析,研究有效的判定条件及同步控制方法。基于整车行驶稳定性,对电机故障控制和同步控制策略进行分析,制定了电机故障工况各轮驱动转矩再分配的安全控制解决方案。利用Simulink搭建故障控制器和同步控制器模型,分析故障工况对整车行驶性能的影响。对车辆在对开路面加速过程的打滑工况进行仿真,分析车轮打滑对整车行驶性能的影响。
1 电机故障控制和同步策略
1.1 电机故障控制策略
六轮驱动平地机电传动系统结构如图1所示。

图1 电传动系统结构图
当车辆行驶过程中电机发生通讯或系统故障时,主控制器通过CAN总线检测到故障信息后应自动切入紧急故障控制状态,并将检测到的故障信息反馈到驾驶室的智能监控界面,通知驾驶员采取紧急停车处理。若驾驶员无法及时察觉故障情况,不仅会造成车辆跑偏,甚至导致严重事故[7]。这些问题都会给车辆的安全行驶带来隐患,也增大了驾驶员的驾驶负担,因此有必要在驱动控制过程中采用主动的故障控制机制,以确保车辆安全行驶。
牵引电机的故障工况包括:单电机故障,对侧或同侧电机故障以及多电机故障[8],各电机故障因子γi的定义:
(1)
当电机发生故障时,故障因子γi置 0,驱动系统对故障电机不分配驱动转矩,对正常工作的牵引电机按等状态重新分配驱动转矩,这样可以有效发挥车轮载荷的附着牵引能力[9]。通过限制给定牵引功率并按牵引特性曲线限制正常工作电机的给定转矩指令,保证整车在较低车速和两侧牵引电机总输出转矩均衡的工况下运行,故障控制框图如图2所示。这样使得整车在部分电机出现故障时仍具有较好通过性和安全行驶稳定性[10]。

图2 电驱动系统故障控制框图
1.2 电机同步控制转矩分配
当平地机在两侧附着系数相差较大的路面行驶时,易出现单侧驱动轮过度滑转的情况;作业过程中会出现偏载工况。这种负载引起非完全滑转,会降低有效牵引力和整机寿命,加剧轮胎磨损,增大系统能量损耗,故要求整机具备同步控制作业功能。
同步控制是指在上述工况下保持两侧驱动轮转速一致的控制方法。这种控制方法通过调节各轮电机的输出转矩实现多轮转速同步协调控制,具有响应迅速、控制准确,可靠性高等优点[11]。
平地机能够通过前轮偏转和铰接两种方式实现转向,其作业和转场行驶时主要采用前轮偏转的形式,当铰接转向油缸以零度转角锁止时,视前后车架为刚性联接[12]。前轮转向示意图如图3所示,取右前转向轮 f 为内轮,左前转向轮a为外轮,则理想纯滚动的内外轮转向角关系如式:

图3 平地机转向示意图

(2)
式中:α为f 轮转向角;β为a轮转向角;δ为前轴中点名义转角;K为主销中心距;L为前后轴距。
当平地机在水平地面上绕转向中心O点采用铰接转向时,前轴中点和后轴中点的转向半径RH,RB满足式(3)的关系:
(3)
式中:θ为铰接转向角;rl为后桥车轮中心至后轴的距离;B为轮距;LH,LB为前、后轴至铰接点的距离。
由此可得到铰接转向时6个车轮的转向半径:
(4)
当复合转向时,根据图2中的图形几何关系并利用正弦定理得:
(5)
bc轮心连线中点的转向半径 Rbc和de轮心连线中点的转向半径 Rde满足式如下的关系[13]:
(6)
联合式(5)和式(6)可得:
(7)
则,复合转向时各轮的转向半径:
(8)
2 基于Simulink控制策略模型
2.1 故障控制器模型
故障控制机制是利用 MATLAB提供的S函数实现控制,故障控制器模型如图4所示。故障控制层是在上层驱动转矩分配的基础上,建立基于转矩控制的多变量输入、多变量输出的S函数模块。根据控制所需的驱动系统电机数量对mdlInitializeSizes子函数进行修改,并利用mdlOutputs 函数定义故障控制的输入、输出变量,按照故障控制机制定义控制语句。
2.2 同步控制器模型
车辆在附着系数较低路面或偏载工况下行驶,同步控制的目标是尽量充分利用打滑车轮的地面附着条件,提高整车的通过性。对于实际控制系统,由于控制对象结构参数的时变特性和外界负载干扰等因素的影响,很难保证打滑车轮电机转速与目标转速完全相等[14]。因此不要求驱动轮转速恒等于目标转速,只要保证驱动轮转速和目标转速的误差在一定范围内即可,这里取5%。
同步控制器的判定程序和转速协调控制功能由MATLAB软件提供的S函数完成,其Simulink模型如图5所示。当打滑判定生效后,系统实时计算的平均转速与打滑车轮轮电机转速的偏差进行转速协调控制,S函数的输出为各轮电机转矩(电流)的调节量。
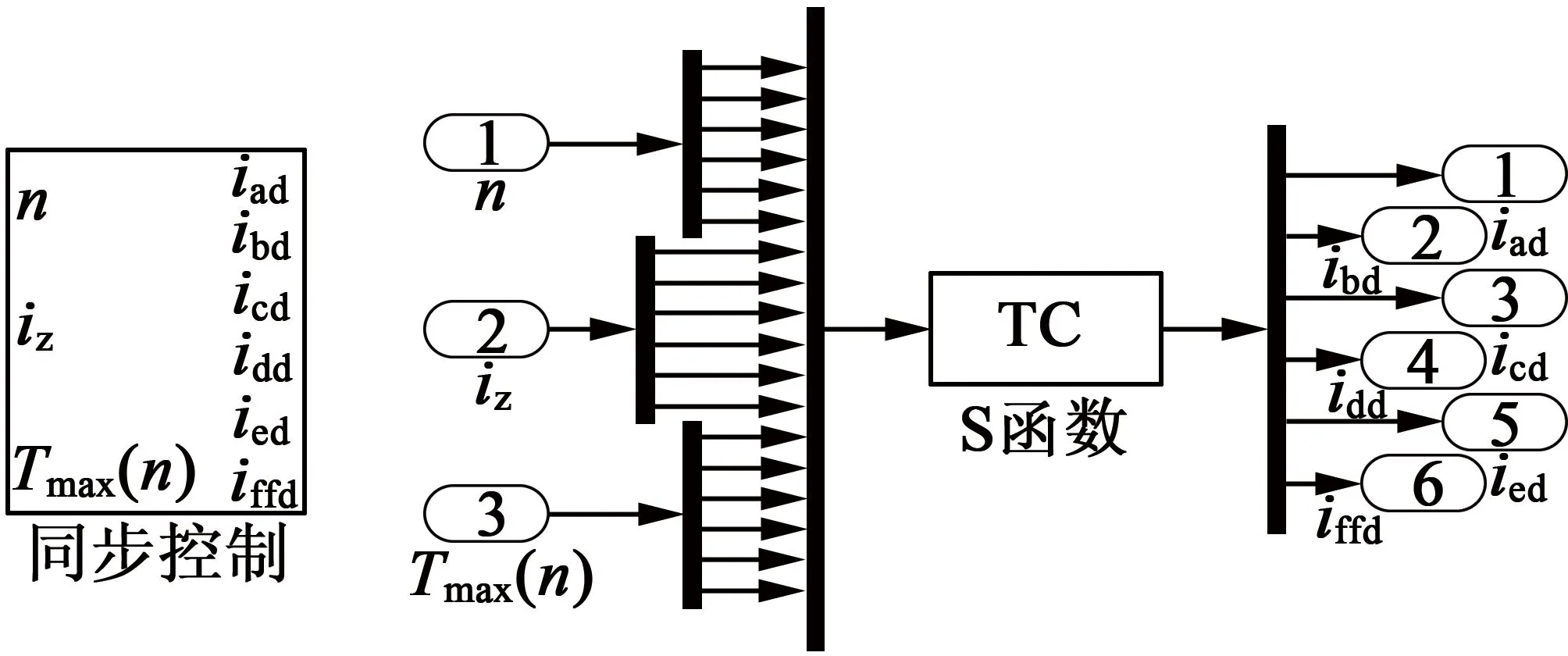
图5 同步控制器模型
2.3 同步控制整体结构模型
同步控制与电机驱动系统整体结构如图6所示。同步控制器的输入为各驱动电机当前转速、上层分配目标电流和电机外特性参数,当判定成立后控制输出目标电流的调节量,结合上层分配电流得到的最终目标电流值输入电机驱动系统[15]。电机驱动系统输出的电机转矩经轮边减速器驱动以S函数形式调用的整车模型adams_sub,车轮转速再反馈回电机驱动系统和同步控制器。

图6 同步控制整体结构图
3 故障控制和同步控制分析
3.1 故障控制分析
电机故障控制方法,对车辆在良好路面上启动加速过程发生电机故障的工况进行控制仿真分析。设计的故障工况如表1所示。
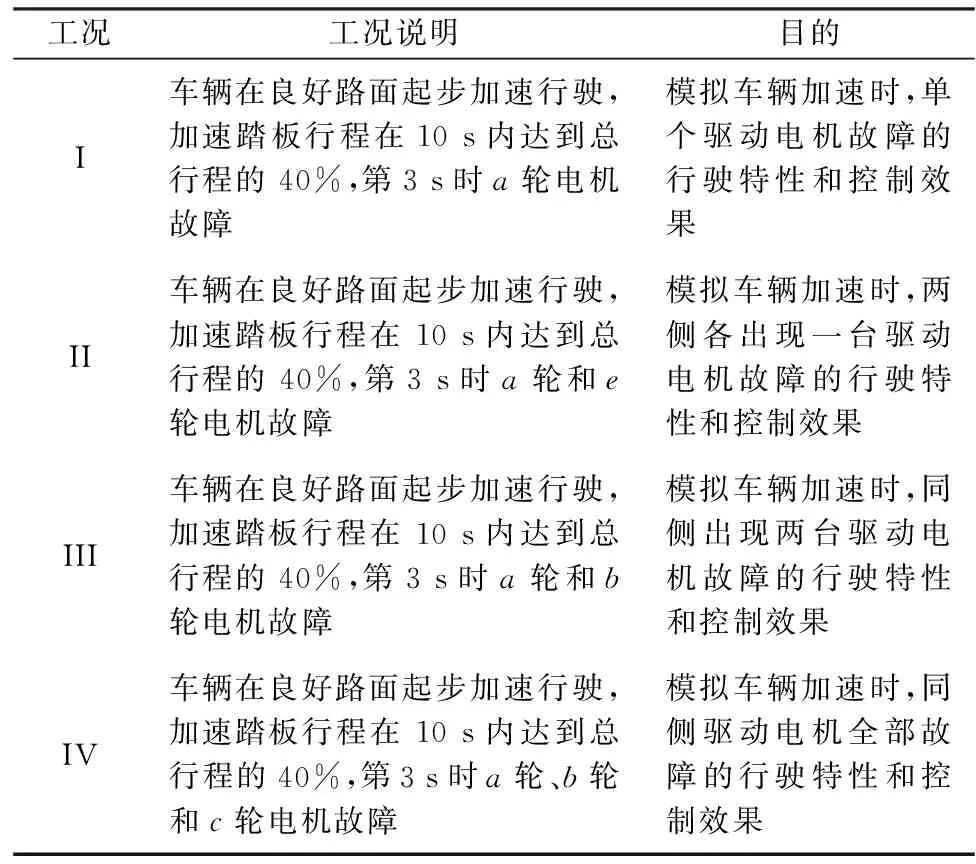
表1 电机故障工况分析
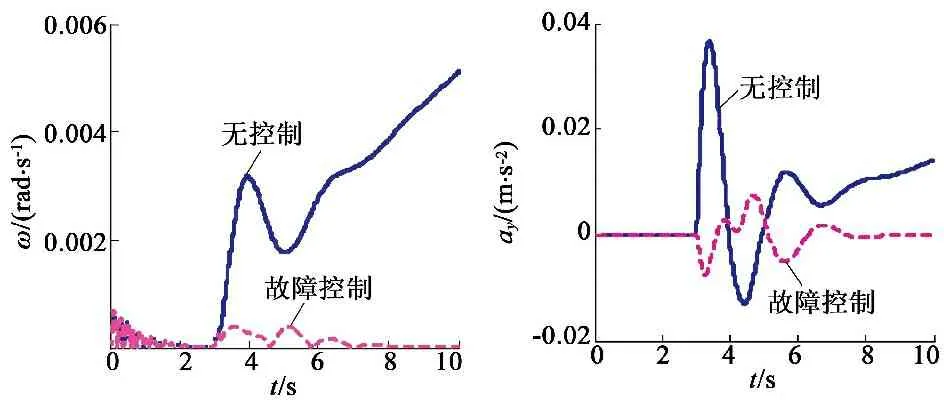
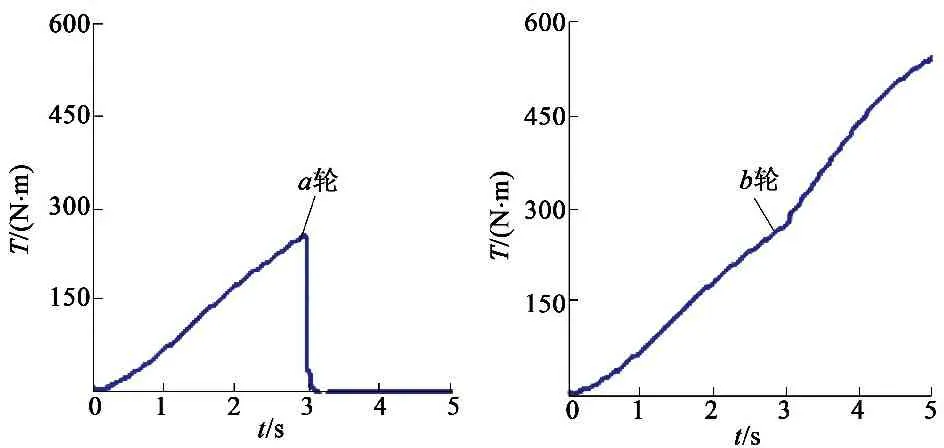
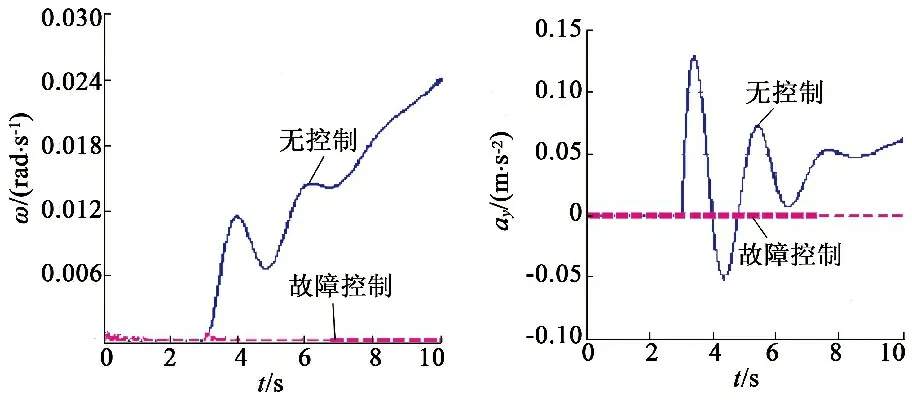
工况I分析结果如图7所示。由图7(a)可知,车辆加速行驶过程第3 sa轮电机故障,根据安全性控制规则保证两侧正常工作电机的输出转矩均衡,即左侧后桥b轮和c轮电机的转矩之和等于右侧电机的转矩之和,且前、后桥电机按等状态分配驱动转矩。左侧两电机的转矩明显增大,右侧电机转矩经过调整后略有增大,以满足需求启动转矩的要求。图7(b)为无控制和采用故障控制两种模式的车辆横摆角速度和侧向加速度对比曲线。由图可见,采取故障控制后车辆的横摆角速度和侧向加速度只出现了微小的波动,且最终稳定在零附近,表明故障控制提高了车辆故障行驶的稳定性。
(a) 各轮电机的转矩曲线
(b) 横摆角速度和侧向加速度曲线
图7 工况I分析结果
工况 II分析结果如图8所示。


(a) 各轮电机的转矩曲线
(b) 横摆角速度和侧向加速度曲线
图8 工况II分析结果
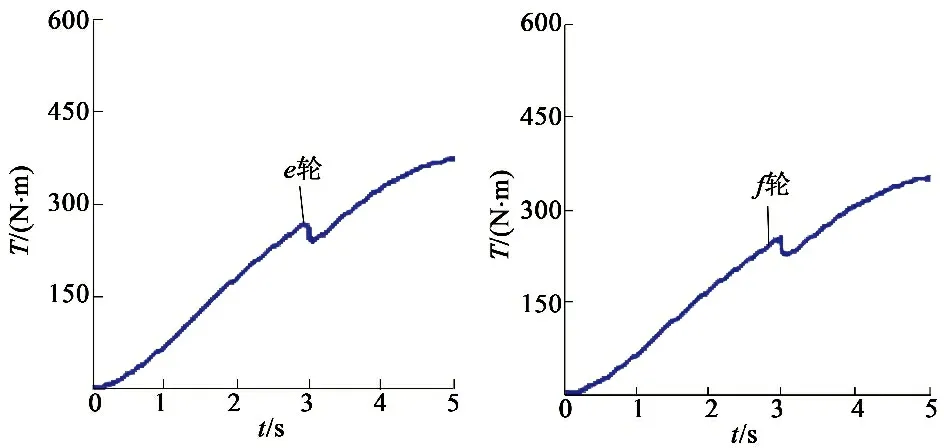
由图8(a)可知,当第 3 sa轮和e轮电机发生故障,两侧正常工作电机的转矩经过调整后等幅继续增大,始终保持两侧电机的输出转矩均衡。左侧后桥两轮驱动转矩相等,右侧f和d轮按桥荷比分配驱动转矩。如图8(b)所示,由于两侧各有一台电机出现故障,所以对整车横摆角速度和侧向加速度的影响小于工况I,采用故障控制后两个参数都基本稳定在零附近,保证了车辆行驶稳定性。
工况 III分析结果如图9所示。


(a) 各轮电机的转矩曲线
(b) 横摆角速度和侧向加速度曲线
图9 工况III分析结果
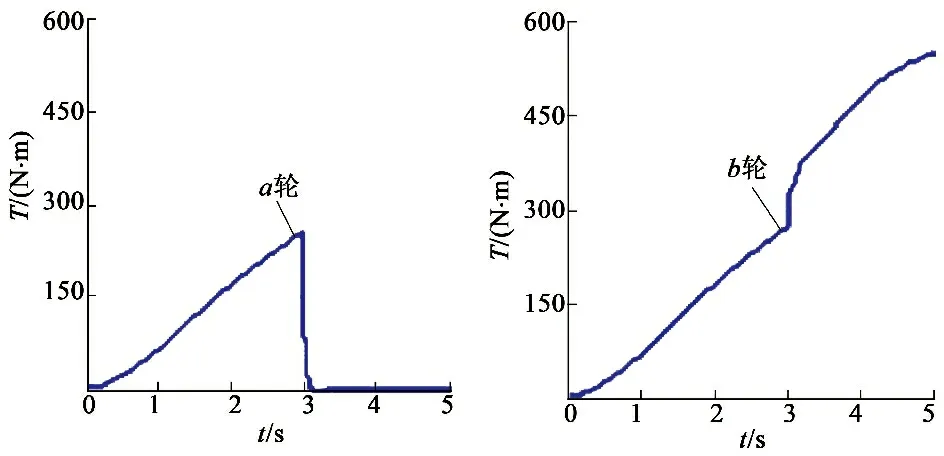
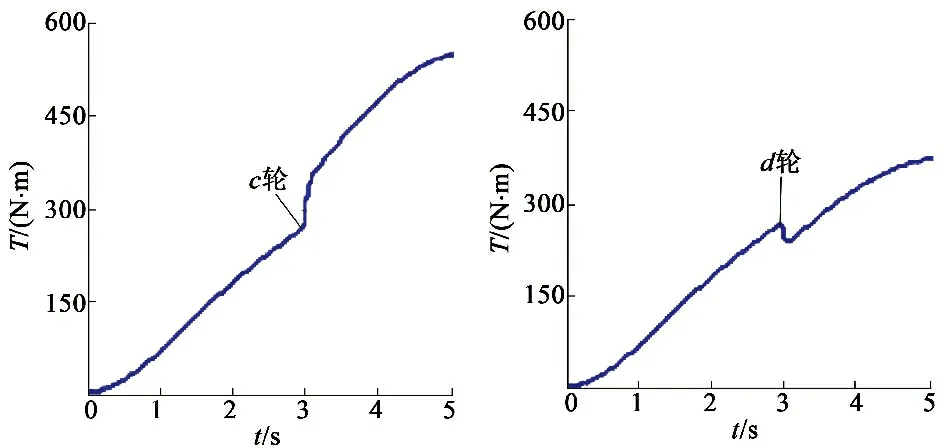
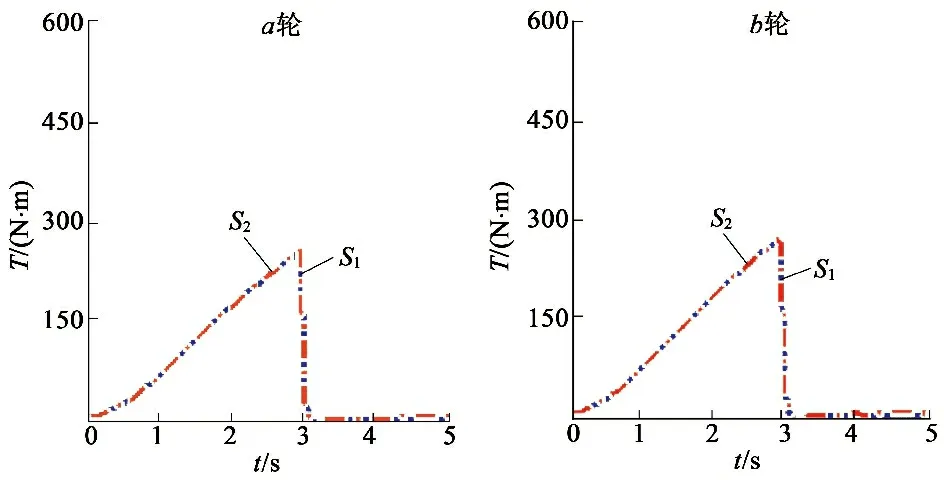
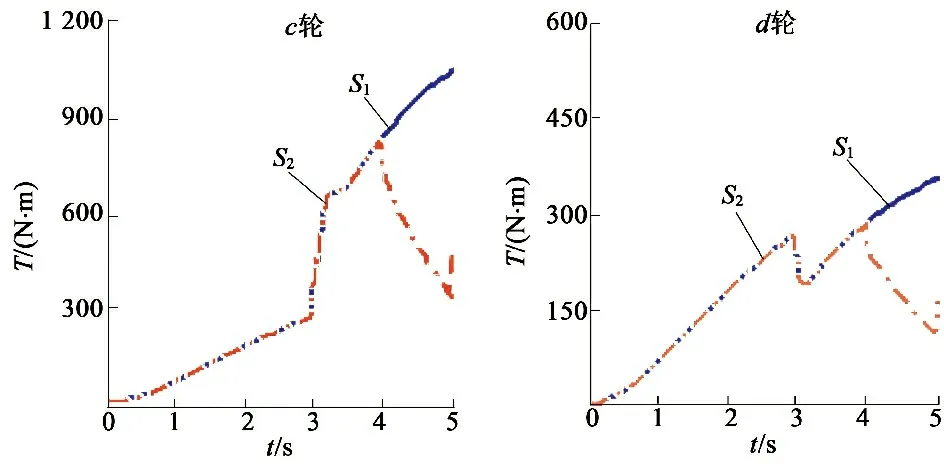
由图9(a)可知,当第 3 s左侧的a轮和b轮电机发生故障,基于上层转矩分配和中层故障控制调节作用后保持两侧输出转矩均衡,c轮的输出转矩明显增大,在有限的地面附着条件下易增大车轮的滑转程度。曲线S1为单独故障控制;曲线S2为驾驶员干涉的故障控制:第4~5 s减小2%踏板行程,驾驶员通过减小加速踏板行程使得整车驱动转矩减小。如图9(b)所示,即使同侧两台电机故障,采用故障控制后整车仍能够保持良好行驶稳定性。
工况IV分析结果如图10所示。



(a) 各轮电机的转矩曲线
(b) 横摆角速度和侧向加速度曲线
图10 工况IV分析结果
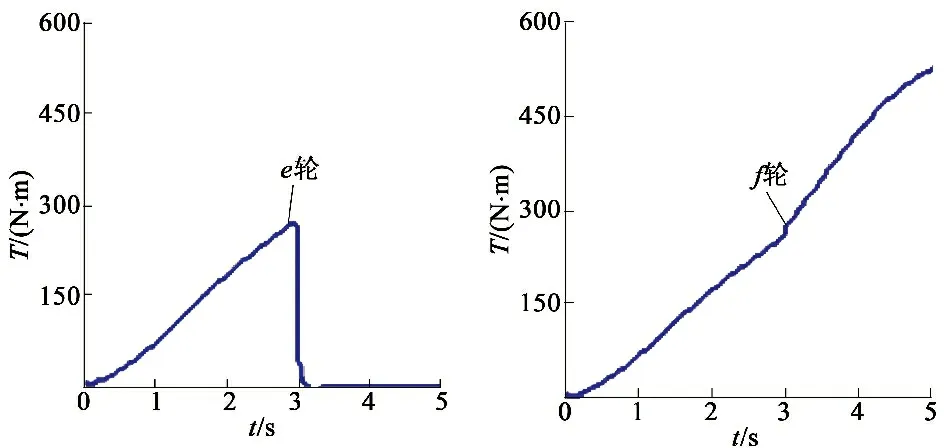
由图10可知,当车辆行驶过程中出现单侧电机全部故障时,较大的横摆力矩会使得整车突然横摆失稳,容易造成驾驶员来不及修正或出现误操作。为确保车辆紧急情况安全行驶,将对侧电机的转矩也置零,确保车辆两侧驱动转矩的平衡,在一定程度上增加安全性能。转矩曲线如图10(b)所示,当需要紧急转移或跛行回家时,通过使能开关强制控制单侧电机工作,单靠驾驶员方向修正驱动车辆行驶。
3.2 同步控制分析
通过修改两侧车轮路面附着系数模拟车辆在对开路面行驶,左轮最高附着系数为0.8,右轮最高附着系数为0.2。车辆以等状态控制加速至3.2 km/h后匀速行驶,第6~7 s各车轮施加1 500 N·m 的负载转矩,模拟加载行驶工况。从第7 s开始驾驶员在0.2 s内突加20%加速踏板行程使车辆加速行驶。


(a) 电机转速、转矩曲线
(b) 横摆角速度与转速比曲线
图11 无控制时分析结果
无同步控制时的分析结果如图11所示,当同步控制没有生效时,由于第6 s开始施加负载转矩,在踏板给定功率下各轮转速呈下降趋势。第7 s加速时各轮电机驱动转矩增大,低附着一侧的f轮打滑,转速迅速增大,转矩下降至350 N·m,后桥e和d轮转速也有较小波动。
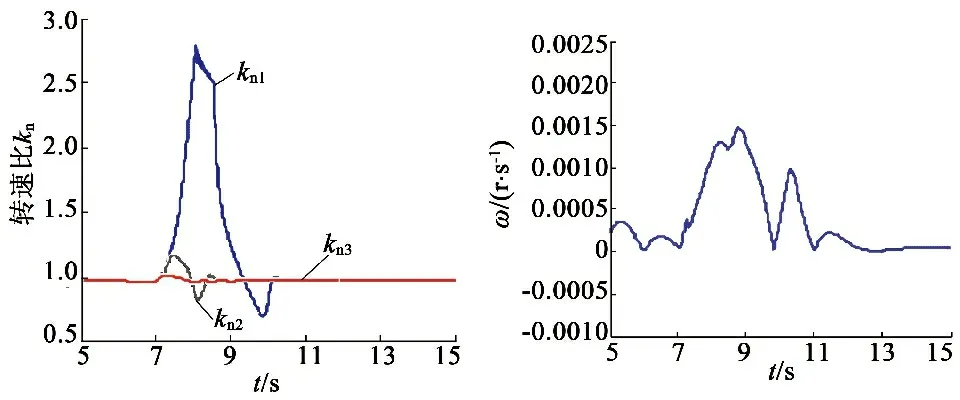
结合电机的转速和转矩曲线可知,f轮打滑时电机的消耗功率比重增大,其他电机相应减少,导致整车牵引转矩下降。由两侧车轮电机的转速比和整车横摆角速度曲线可见,前桥f轮与a轮的转速比从第7.5 s 开始超出判定阈值,后桥两侧车轮的转速比也有波动,但没有超出阈值范围。由于车速不高,f轮打滑时整车的横摆角速度出现较小波动。
同步控制时的分析结果如图12所示。

(a) 电机转速-转矩曲线

(b) 横摆角速度与转速比曲线
(c) 车速和电流系数曲线
图12 同步控制下的分析结果
由图12(a)和图12(b)可知,前轴速比超出打滑判定阈值并持续1 s后,同步控制第8.6 s开始工作。在同步控制过程中,f轮消耗的功率随着其转速的下降而减小,整车用于驱动的有效功率随之增加,因此其他车轮电机的驱动转矩有所增大,从而增强了整车的通过性。同步控制使得打滑车轮转速快速下降至平均水平,整车横摆角速度的波动变得很小,车辆出现的轻微跑偏可以由驾驶员通过方向盘进行修正。由图12(c)可知,同步控制是通过控制打滑车轮的转矩达到调整转速的效果,减小了系统损耗功率,从而增大了有效驱动功率,使车辆在同步控制时具有良好的通过性和稳定性。在同步控制作用下,f轮的电流系数在 10.2 s 恢复到平均转矩5%范围内,可退出同步控制。
4 结 语
针对六轮独立驱动平地机牵引电机故障及在低附着路面行驶或偏载作业时出现的打滑现象,结合其转向行驶运动学分析,研究有效的故障控制和同步控制方法。基于整车行驶稳定性,对电机故障控制和同步控制策略进行分析,制定了电机故障工况各轮驱动转矩再分配的安全控制解决方案。利用Simulink搭建故障控制器和同步控制器模型,分析故障工况和打滑工况对整车行驶稳定性的影响。结果表明:不同的电机故障工况分析可知,在控制策略下,故障轮的横摆角速度和侧向加速得到有效控制,车辆行驶稳定;车辆在对开路面加速过程的打滑工况下,同步控制提高了有效驱动功率,有效控制车轮打滑,实现转矩的再分配,增强了整车通过性和稳定性;故障和同步控制提高了车辆故障行驶的稳定性和通过性。
[1] TAHAMI F,FARHANGI S,KAZEMI R.A fuzzy logic direct yaw-moment control system for all-wheel-drive electric[J].Vehicles System Dynamics,2004,41(3):203-221.
[2] SAKAI S I,HORI Y.Fuzzy-hybrid modeling of an Ackerman steered electric vehicle[J].International Journal of Approximate Reasoning,2006,41(2):343-368.
[3] DAS J C,OSMAN R H.Grounding of AC and DC low-voltage and medium-voltage drive systems[J].IEEE Transactions on Industry Applications,1998,34(1):205-216.
[4] STEIMEL A L.Direct self-control and synchronous pulse techniques for high-power traction inverters in comparison[J].IEEE Transactions Industrial Electronics,2004,51(4):810-820.
[5] LUCAS H W,ENG C,MECH E I,et al.Control of power on a large diesel-electric locomotive of new design[J].Proceedings of the Institution of Electrical Engineers,1975,122(4):409-413.
[6] 刘力,罗禹贡,李克强.基于动态目标调整的汽车全轮纵向力分配的研究[J].汽车工程,2010,32(1):60-64.
[7] BRAS B C,MISTREE F D.A compromise decision support problem for axiomatic and robust design[J].Journal of Mechanical Design,1995,117(1):100-111.
[8] 张传伟,曹秉刚.电动汽车驱动效率仿真研究[J].系统仿真学报,2007,19(1):6-8.
[9] 王庆年,张缓缓,靳立强.四轮独立驱动电动车转向驱动的转矩协调控制[J].吉林大学学报(工学版),2007,37(5):985-989.
[10] 孙会来,金纯,张文明,等.电动轮驱动系统设计与控制策略研究[J].微特电机,2014,42(2):52-55.
[11] 黄英,崔兆伟,孙逢春,等.履带车辆电传动发动机-发电机组控制系统开发研究[J].兵工学报,2007,28(1):1-6.
[12] 范晶晶,罗禹贡,张弦,等.多轴独立电驱动车辆驱动力的协调控制[J].清华大学学报(自然科学版),2011,51(4):478-481.
[13] 王家堡,黄守道,郭超,等.电动轮自卸车电传动系统仿真研究[J].微特电机,2013,41(4):24-27.
[14] 邹广才,罗禹贡,李克强.基于全轮纵向力优化分配的4WD车辆直接横摆力矩控制[J].农业机械学报,2009,40(5):1-6.
[15] 王旭东,刘金凤,张雷.蚁群神经网络算法在电动车用直流电机起动过程中的应用[J].中国电机工程学报,2010,30(24):95-100.
Analysis of Fault and Synchronous Control of Traction Motor Based on Vehicle Handing Stability
JINGYu-jun
(Zhongshan Polytechnic, Guangdong 528400, China)
Electric drive grader driving road conditions is complex, and there are always some parts of motor communication or system failure in running, so the active fault control mechanism is need to be used to ensure that the vehicle safe driving. When the grader is running on the road that the friction coefficient of the road is a large difference between the two sides, there is easy to appear unilateral drive wheel over slip and partial load condition. To the above problems, based on the vehicle handing stability, the motor fault control and synchronous control strategy were analyzed, and the safety control solution of the wheel drive torque redistribution in motor fault conditions was established. The model of the fault controller and the synchronous controller was built based on Simulink, and the influence of the failure mode on the vehicle driving performance was analyzed. The results show that the stability and the passing of the vehicle fault are improved by the fault and the synchronous control. The design of the fault and synchronization controller for the vehicle in the process of driving on the road to speed up the process of the sliding mode, analysis of the impact of wheel slip on the vehicle driving performance, synchronous control to improve the effective driving power, and enhance the vehicle passed and stability.
six-wheel electric drive grader; traction motor; fault control; synchronous control; handing stability; traffic ability
2016-01-14
国家自然科学基金项目(51305333);陕西省科学技术研究发展计划工业攻关计划项目(2014K07-23)
TM34
A
1004-7018(2016)08-0070-06
景玉军(1979-),男,硕士,讲师,主要研究方向为智能交通及电机控制技术。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
制造技术与机床(2017年2期)2017-05-04
舰船科学技术(2015年8期)2015-02-27
噪声与振动控制(2015年4期)2015-01-01
航天返回与遥感(2014年5期)2014-07-31
客车技术与研究(2014年1期)2014-03-20
筑路机械与施工机械化(2014年7期)2014-03-01
筑路机械与施工机械化(2014年5期)2014-03-01
筑路机械与施工机械化(2014年3期)2014-03-01
筑路机械与施工机械化(2014年3期)2014-03-01
