基于ADAMS的摆环机构运动仿真分析
2016-11-25 09:17周伟权史增录张绢赵守瑞白圣贺
农业科技与装备 2016年7期
周伟权 史增录 张绢 赵守瑞 白圣贺
摘要:摆环机构是实现往复式切割器运动的一种典型传动机构。运用Solidworks软件对摆环机构进行建模设计,介绍其结构及工作原理。通过ADAMS软件对摆环机构进行模拟仿真,研究其传动方式和运动规律,获得割刀在往复运动方向上的位移、速度、加速度等运动曲线,为农、牧业收获机械中摆环机构的设计分析提供依据。
关键词:摆环机构;运动仿真;造型设计;ADAMS
中图分类号:S220.39 文献标识码:A 文章编号:1674-1161(2016)07-0019-03
联合收获机械的切割装置分为往复式和圆盘式两种。其中,往复式切割器的驱动部件有曲柄连杆机构、摆环机构、行星齿轮机构、双曲柄机构和双飞轮机构等。这些传动机构的共同特点是把回转运动变成割刀的平面往复直线运动。摆环机构作为一种运动转换部件,起着与曲柄连杆机构相同的作用,即将旋转运动转化为往复运动。且有较曲柄连杆机构结构紧凑、稳定、噪声小的优点,故被广泛应用于需进行运动转换的机具。
利用Solidworks进行摆环机构建模,并运用ADAMS软件对摆环机构进行仿真分析,得出摆环机构的相关数据,旨在为摆环机构的设计和研究提供依据。
1 摆环机构结构与工作原理
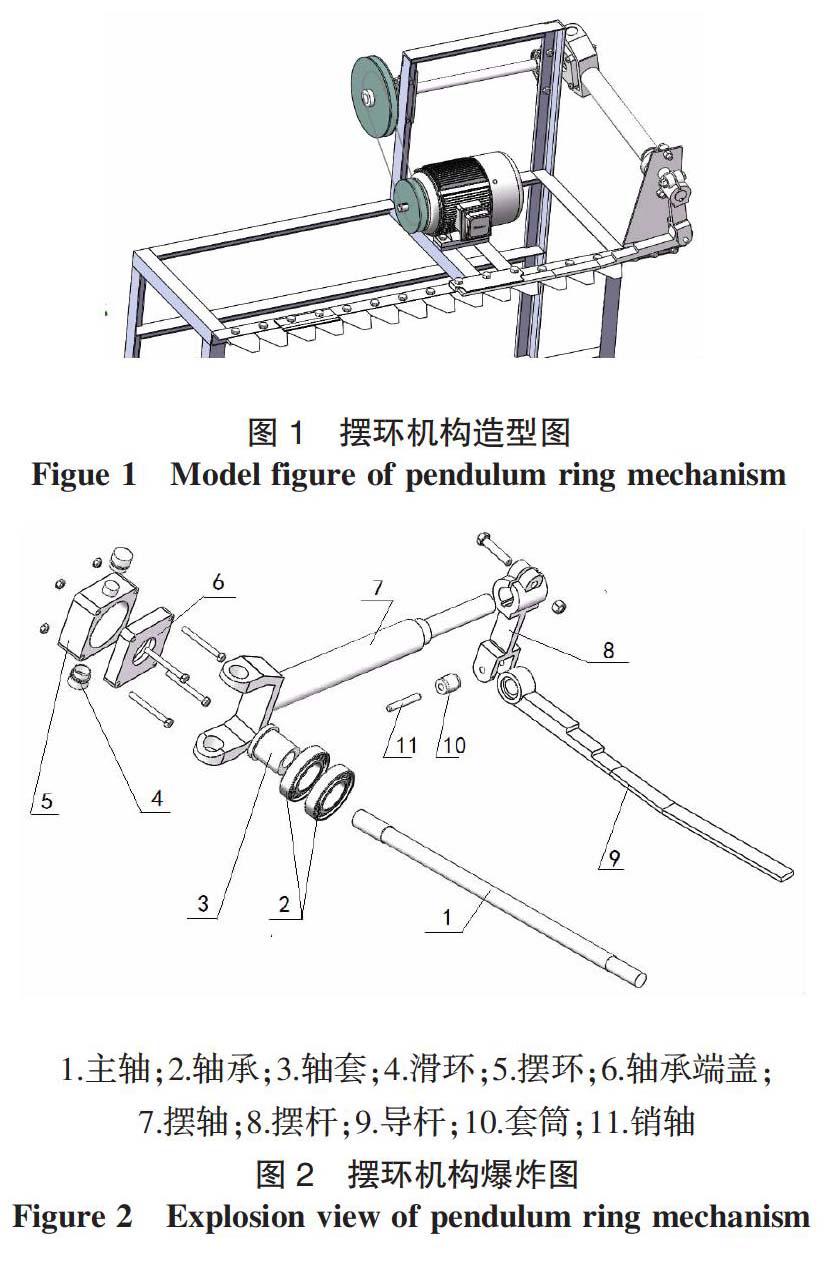
利用Solidworks完成摆环机构的虚拟装配,其机构如图1所示,主要由主轴,摆环,摆轴,摆杆和导杆等零件组成。
为更直观地表达摆环机构的详细结构,其模型爆炸视图如图2所示。摆环机构是一种由装在主轴上的摆环通过摆轴把回转运动转变为往复运动的机构。轴套套在主轴上,主轴旋转带动轴套转动,轴套与轴承内圈相连,轴承外圈带动摆环转动,摆环摆动时通过摆轴摆杆带动导杆,从而驱动割刀进行往复运动。
2 摆环机构的运动特性
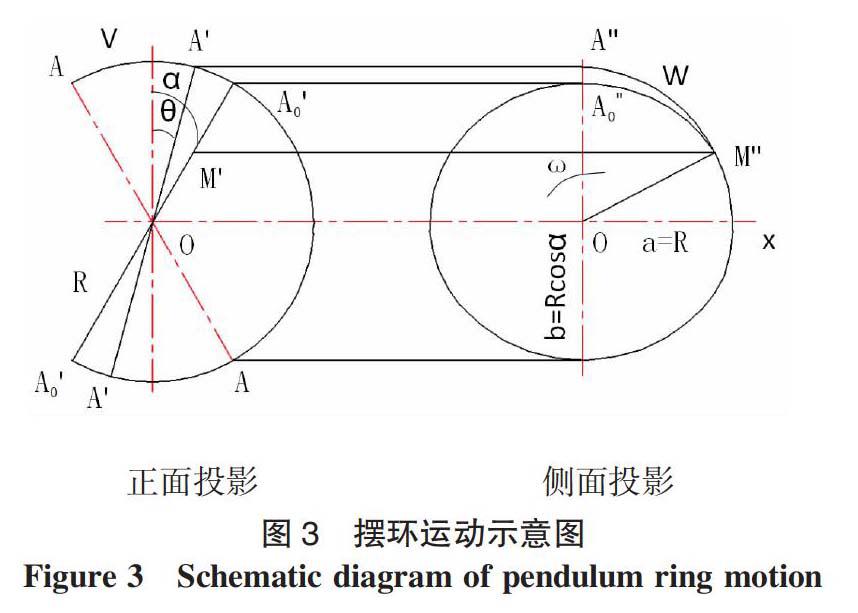
割刀的运动特性对切割器性能有直接影响。往复式切割器工作时,动刀片在摆环机构的驱动下做横向往复直线运动。图3是摆环运动示意图,从正面看过去,摆环的中心为O,半径等于OA′,它以倾角ɑ刚性地固连于水平主动轴上,随轴一起做等速旋转,角速度为ω;在W面上,摆环的投影为一椭圆,并随主动轴(其投影聚集于点)一同以角速度ω旋转运动。
摆环机构的割刀位移方程式为:x=-σrcosωt
摆环机构的割刀速度方程式为:Vx=μrωsinωt
摆环机构的割刀加速度方程式为:αx=γrω2cosωt
式中:x为割刀位移;Vx为速度;αx为加速度;σ,μ,γ皆为摆环偏角ɑ和rω的函数。
在摆环偏角≦15°时,摆环机构与曲柄连杆机构的割刀运动规律类似。当ɑ角大于25°时,则αx较曲柄连杆机构有明显的差异,即αx在一个周期内出现两个高峰,使机器振动加剧。故一般取摆角ɑ=15~18°。
3 摆环机构的仿真分析
3.1 机构创建
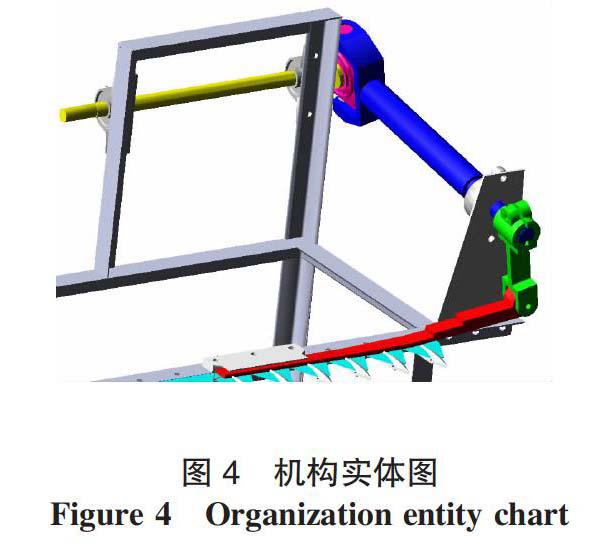
利用三维建模Solidworks软件对机构进行建模,通过数据转换接口将模型保存为Parasolid(X_T)格式,并导入到ADAMS中,完成仿真分析模型创建,如图4所示。对导入到ADAMS中摆环机构的虚拟样机进行各部件布尔操作、重命名、添加材料属性等编辑。此外,由于导杆在实际运动中存在弹性变形,故在虚拟样机中将导杆做为柔性部件进行仿真分析。
3.2 添加约束与载荷
虚拟样机构建完成后,利用ADAMS软件中的主工具箱中的约束功能,按照机构的实际状态将各个构件进行约束添加。添加完成的约束如表1所示。
根据摆环机构的设计要求,以主轴转速500 r/min作为其动力输入速度,并在在虚拟样机的机架与主轴之间的旋转副上施加驱动载荷。
3.3 仿真分析
根据收割机的传动比计算出主轴的转速为500 r/min。在ADAMS添加驱动并设置其转速,进行机构运动仿真,设置仿真时间End time为0.25 s,仿真步数为200,分析动刀片的运动规律。
从图5可以看出割刀在x轴上的移动变化特性:最大位移为655 mm,最小位移为565 mm,行程为45 mm,在X轴做周期为0.12 s的往复间谐振动,满足设计最初设计行程的要求。
图6是割刀在x方向上的速度变化曲线。由曲线可以看出,割刀在往复运动完成1次切割时,位移速度变化范围在-2.5~2.5 m/s之间,满足切割要求。
图7是割刀的加速度变化曲线。由于导杆为柔性体,在开始受力时因存在塑性变形而受力不均,加速度突变不稳定,故从稳定后开始分析,确定其加速度变化范围是-112.8~120.0 m/s。
对照图5—7可以看出,当割刀的行程达一半时,速度最大,加速度为0 mm/s;在割刀行程最大时,其速度为0 m/s,但加速度最大,符合理论计算模型。
4 结论
运用三维建模软件Solidworks对摆环机构进行造型设计,概述摆环机构的构造、工作原理,分析其运动特性,通过仿真软件ADAMS对摆环机构的情况进行模拟仿真,研究割刀在往复运动方向上的位移、速度、加速度变化曲线,获得割刀运动参数,为今后摆环机构的设计计算提供分析方法。
参考文献
[1] 毛文华,曹晶晶,姜红花,等.基于多特征的田间杂草识别方法[J].农业工程学报,2007(11):206-209.
[2] 谢飞,尹洋.收获机械切割机构的仿真分析[J].江苏农业科学,2015(10):474-476.
[3] 谢珣,史景钊,李保谦,等.基于ADAMS的摆环机构运动仿真及优化设计[J].农机化研究,2015(6):67-69.
[4]吴雪梅,张富贵,吕敬堂,等.收获机械中摆环机构运动学分析[J].农机化研究,2010(4):58-59.
猜你喜欢
未来英才(2016年19期)2017-01-04
建筑建材装饰(2016年11期)2016-12-29
汽车科技(2016年6期)2016-12-19
科教导刊·电子版(2016年26期)2016-11-21
考试周刊(2016年71期)2016-09-20
科技视界(2016年17期)2016-07-15
科技视界(2016年10期)2016-04-26