
基于改进滑模控制技术的光伏阵列最大功率跟踪控制研究
2016-11-23 05:48党克陆雯雯严干贵
广东电力 2016年10期
党克,陆雯雯,严干贵
(东北电力大学 电气工程学院,吉林 吉林 132012)
基于改进滑模控制技术的光伏阵列最大功率跟踪控制研究
党克,陆雯雯,严干贵
(东北电力大学 电气工程学院,吉林 吉林 132012)
为了快速有效地追踪光伏阵列输出的最大功率点,设计一种基于指数趋近律的滑模控制方法对其进行追踪。根据光伏阵列输出的最大功率点特性来设计该系统的切换超平面,通过滑动模态控制器使系统状态从超平面之外向切换超平面收束。为了使系统在快速趋于滑模面的同时削弱抖振,在切换超平面的附近设计一个临界值,并根据指数趋近律的定义,更好地把握趋近律参数的设定。仿真实验表明该方法可以快速准确地追踪到系统的最大功率点,并且在滑模控制趋近滑模面时较好地削弱抖振。
光伏阵列;滑模控制;指数趋近律;最大功率点追踪
随着社会经济的迅猛发展,人们对能源的需求急剧增长,化石能源匮乏,且传统的能源开发及利用严重破坏了生态环境。太阳能作为一种取之不尽用之不竭的环保新能源,受到人们越来越多的关注。当光伏阵列受到局部阴影遮挡,其输出特性呈现多峰值现象,光电转换效率降低,光伏阵列输出功率受到损耗。为了有效利用太阳能,有必要对光伏阵列进行最大功率跟踪(maximum power point tracking,MPPT)[1]。
滑模控制本质上是一类特殊的非线性控制,其非线性表现为控制的不连续性,这种控制策略与其他控制的不同之处在于:系统的“结构”并不固定,而是在动态过程中,根据系统当前的状态,有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动。由于滑动模态(以下简称“滑模”)可以设计且与对象参数及扰动无关,所以变结构控制响应快速,对参数变化及扰动不灵敏,无需系统在线辨识且其物理实现简单[2]。
文献[3]在采用升降压DC-DC变换电路的基础上应用滑模控制方法实现系统最大功率点输出,并与传统的功率比较控制方法进行仿真比较,虽提高了搜索速度,但输出端功率与电压的波动较大。文献[4]在进行滑模控制的设计中选用具有降压调节功能的Buck型变换器,通过合理设计Buck电路中的电感值,减小输出纹波。文献[5]在设计滑模控制设计中采用Zeta变换器,减小MPPT控制系统在最大功率点处的抖振,具有较快的跟踪速度以及更小的超调量。文献[6]设计一种模糊滑模MPPT控制方法,利用滑模技术设计基于输出功率偏差的滑模函数,利用滑模函数及其导数构建滑模自适应校正器消除MPPT抖振;但该方法需要已知系统非精确数学模型并估计模型不确定度的范围,且控制增益矩阵要可逆。
综上所述,由于光伏阵列具有明显的非线性特点,且Zeta变换电路具有变结构及高速开关特点,所以本文将在改进的Zeta变换电路的基础上进行滑模控制设计,以更快速准确地追踪到光伏阵列的最大功率点。同时为了更好地削弱抖振,采用指数趋近律改进滑模控制技术。
1 太阳能电池的工作特性
光伏电池上的半导体材料在太阳光照射的条件下产生光伏效应,直接将光能转化为电能。光伏电池的等效电路如图1所示,数学模型如式(1)所示[7]。

Isc—光生电流,其值与太阳的光照强度及电池的辐照面积成正比,且与环境温度存在关系;ID—通过二极管的电流;R1—串联电阻;R2—旁路电阻;Upv—光伏电池工作电压;Ipv—光伏电池工作电流。图1 光伏电池的等效电路
(1)
式中:Isat为光伏阵列饱和电流;q为电子的电荷量;A为二极管特性因子;K为玻尔兹曼常量;T为太阳能电池温度。
在光伏发电系统中,光伏电池的利用率除了与光伏电池的内部特性有关外,还受使用环境如辐照度、负载和温度等因素的影响。当光伏阵列所处的外界环境发生变化时,其输出的特性曲线也将发生响应变化,而光伏电池可运行在唯一的最大功率点上。因此,对于光伏发电系统来说,应当寻求光伏电池的最优工作状态,最大限度地将光能转化为电能。
2 MPPT控制电路设计
在阴影遮挡的情况下,光伏阵列的输出电压变小,所以本文将在光伏阵列的输出端连接Zeta变换电路。Zeta变换器的输出电压为正极性,输入输出关系相同,并且输出电流是连续的,适于光伏阵列的MPPT控制。滑模控制趋于稳态时,系统会在滑模面附近作小幅度高频率的上下抖动,而Zeta变换器输出的电感电流波动小,可以很好地减弱系统抖动[5]。为了保证光伏阵列输出电压的单向性,本文将在Zeta电路的输入端接入二极管,同时并联电容,使光伏阵列的输出电压与电容电压近似相等[8]。为了提高系统的安全性与可靠性,将对Zeta变换器进行改进,即采用隔离型Zeta变换器[9]。MPPT控制系统结构如图2所示。
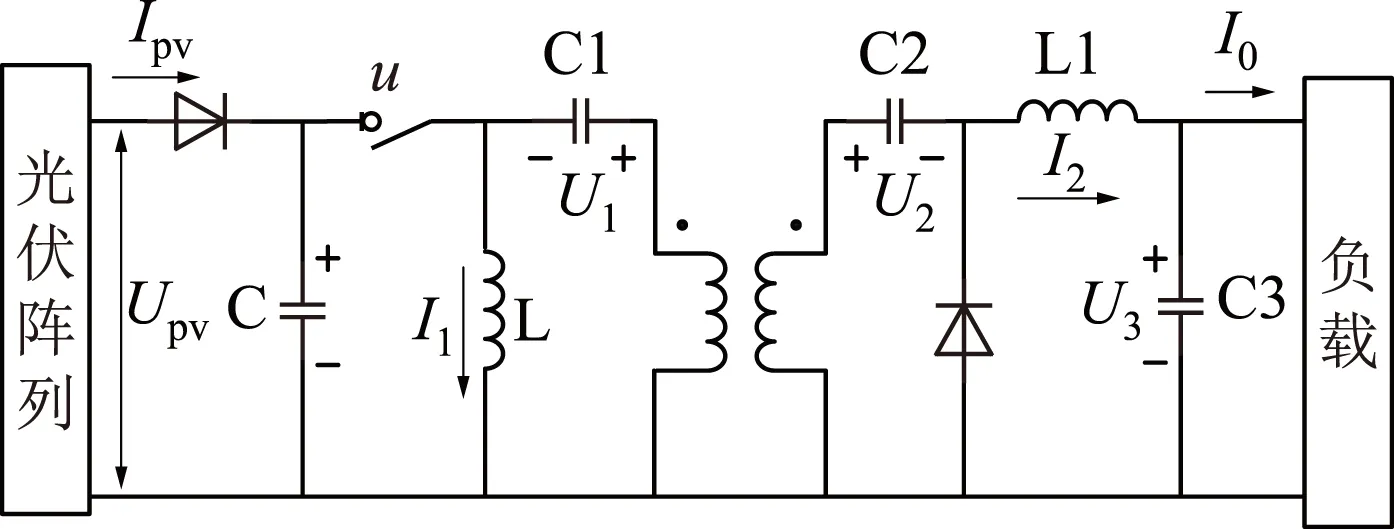
C—电容;U1—电容C1的电压;U2—电容C2的电压;U3—电容C3的电压;I1—流过电感L的电流;I2—流过电感L1的电流;I0—流过负载的电流;u—控制开关导通和关断的控制函数,当u为1时,开关导通,当u为0时,开关关断。图2 输出电路拓扑结构
经过电路分析可得系统数学模型为[4]:
式中:C、C1、C2、C3分别为电容C、C1、C2、C3的电容;L、L1分别为电感L、L1的自感。
x为系统的状态变量矩阵,取
则系统的数学模型为

3 滑模控制设计
在设计隔离型Zeta变换器滑模控制器时,系统应具备较好的动态特性,要能保证系统以较快的速度到达滑模面。在系统趋于滑模面时,要能够减小系统的抖振,减小输出电压的超调量和波动。为此本文研究将指数趋近律应用于滑模控制。
光伏阵列输出的功率
由光伏阵列的输出特性可知,当光伏阵列工作于最大输出功率点时,有
即
取切换函数
(2)
取开关控制信号

由式(2)得切换超平面
(3)
由式(3)得等效控制
(4)
因
(5)


由式(4)至(6)得ueq=-Ipv/(I1+I2).
将式(1)代入式(2)得到
a)当S>0时,u=0,电容充电,系统工作在最大功率点左侧,即
(7)
(8)

b)当S<0时,u=1,电容放电,系统工作在最大功率点右侧,即
(9)
将式(9)代入式(8)得

(10)
由上述分析可知,系统工作于2种状态下,式(10)都成立,即系统满足李雅普诺夫函数的到达条件。
所以此控制符合设计要求。

式中ueq为进入边界面σ时的开关状态。
运用普通滑模控制和指数趋近律滑模控制相结合的控制示意图如图3所示。

Pout—光伏阵列输出功率;Umpp—指数趋近律滑模控制光伏阵列工作电压。图3 改进的滑模控制示意图
根据光伏阵列输出的特性曲线可知,在外界环境发生变化时,光伏阵列的输出最大功率发生变化,因此本文选择
式中:m为常系数(通过实验选择);Pmax为光伏阵列在标准状态下输出的最大功率[12]。
4 系统仿真
在MATLAB的Simulink模块中搭建了光伏阵列MPPT仿真模型。在该仿真模型中,光伏电池的功率为300W,最大功率点电压为68.7V,电容C=C1=C2=300μF,C3=2 000μF,电感L=1mH,L1=5mH。本文设计的方案与常规的滑模控制和扰动观察法的功率输出曲线如图4所示。

(a)基于指数趋近律的滑模控制

(b)常规滑模控制

(c)扰动观察法图4 光伏阵列输出功率随时间变化的仿真结果
基于指数趋近律的滑模控制追踪到最大功率点的时间是0.684 s,最大功率为298.721 W,追踪误差为0.426%;常规的滑模控制追踪到最大功率点的时间是0.766 s,最大功率为297.261 W,追踪误差为0.913%;扰动观察法追踪到最大功率点的时间是1.1 s,最大功率为295.355 W,追踪误差为1.55%。由图4可知,在追踪最大功率点的过程中扰动观察法光伏阵列输出功率的波动较大,常规的滑模控制在趋于稳态时抖振的频率大、幅度小,而本文研究的基于指数趋近律的滑模控制在趋于稳态时明显降低了抖振。
5 结束语
本文对光伏阵列的输出特性曲线进行研究,采用了改进的隔离型Zeta变换电路,其输入输出特性适应于光伏阵列的MPPT控制,同时其输出端的电感电流脉动小,更好地降低了系统的抖振,并且其隔离型的结构提高了系统的安全性与可靠性。在控制技术方面,本文在滑模面附近设计一个临界值,将滑模控制与指数趋近律相结合,在系统远离滑模面时,利用滑模控制可以快速使系统趋近滑模面;在离滑模面较近时,利用指数趋近律可以使系统在快速趋近滑模面的同时减小抖振。在仿真实验中将本文所研究的方法与常规滑模控制技术和扰动观察法相比较,此方法可以快速地追踪到光伏阵列输出功率最大值,在减小光伏阵列输出功率的波动及超调量的同时降低功率追踪误差。综上所述,本文研究的基于指数趋近律的滑模控制具有良好的追踪效果。
[1] 雷一,赵争鸣. 大容量光伏发电关键技术与并网影响综述[J]. 电力电子,2010(3):16-23.
LEI Yi,ZHAO Zhengming. Overview of Large-scale PV Integration Key Technologies and Its Impact[J]. Power Electronics,2010(3):16-23.
[2] 赵希梅,赵久威. 永磁直线同步电机的互补滑模变结构控制[J]. 中国电机工程学报,2015,35(10):2552-2557.
ZHAO Ximei,ZHAO Jiuwei. Complementary Sliding Mode Variable Structure Control for Permanent Magnet Linear Synchronous Motor[J]. Proceedings of the CSEE,2015,35(10):2552-2557.
[3] 张淼,吴捷. 滑模技术在PV最大功率追踪系统中的应用[J]. 电工技术学报,2005,20(3) :90-93.
ZHANG Miao,WU Jie. Application of Slide Technology in PV MPPT System[J].Transactions of China ElectrotechnicalSocirty,2005,20(3):90-93.
[4] 王飞,赵慧. 基于滑模变结构理论太阳能最大功率跟踪研究[J]. 电测与仪表,2009,46(6): 43-46.
WANG Fei,ZHAO Hui. Study of Maximum Power Point Tracker on the Solar CellBased on Sliding Mode Controller of Variable Structure[J].Electrical Measurement & Instrumentation,2009,46(6):43-46.
[5] 黄勤,石国飞,凌睿,等. 基于滑模控制的光伏系统MPPT控制方案[J].计算机工程,2012,38(6):253-258.
HUANG Qin,SHI Guofei,LING Rui,et al.MPPT Control Scheme for Photovoltaic System Based on Sliding Mode Control[J]. Computer Engineering,2012,38(6):253-258.
[6] 徐红伟,张立彬,胥芳,等.模糊滑模控制在光伏电池MPPT中的应用[J].太阳能学报,2012,33(5):789-794.
XU Hongwei,ZHANG Libin,XU Fang,et al.Application on Fuzzy-slide Control in PV MPPT System[J].ActaEnergiae Solaris Sinica,2012,33(5):789-794.
[7] 杨永恒,周克亮. 光伏电池建模及MPPT控制策略[J]. 电工技术学报,2011,26(S1):229-234.
YANG Yongheng,ZHOU Keliang. Photovoltaic Cell Modeling and MPPT Control Strategies[J]. Transactions of China Electrotechnical Society,2011,26(S1):229-234.
[8] 王鹏,刘利则,马聪. 新型三相逆变器直流连接电容的选取方法[J]. 东北电力大学学报,2007,27(6):77-81.
WANG Peng,LIU Lize,MA Cong. Selecting Method of the DC-link Capacitor of a Novel Three-phase Inverter[J]. Journal of Northeast Dianli University,2007,27(6):77-81.
[9] 王勤,阮新波,张杰,等. 基于脉冲源单元的单一次绕组隔离型多输入变换器[J]. 电工技术学报,2011,26(1):115- 122.
WANG Qin,RUAN Xinbo,ZHANG Jie,et al. Isolated Multiple-input Converters with Single Primary Winding Based on Pulsating Source Cell[J].Transactions of China Electrotechnical Society,2011,26(1):115-122.
[10] LEVRON Y,SHMILOVITZ D.Maximum Power Point Tracking Employing Sliding Mode Control[J].IEEE Transactions on Circuits and Systems I: Regular Papers,2013,60(3):724-732.
[11] 张巍巍,王京. 基于指数趋近律的非奇异Terminal滑模控制[J]. 控制与决策,2012,27(6):909-913.
ZHANG Weiwei,WANG Jing. Nonsingular Terminal Sliding Model Control Based on Exponential Reaching Law[J]. Control and Decision,2012,27(6):909-913.
[12] CHOWDHURY S R,SAHA H.Maximum Power Point Tracking of Partially Shaded Solar Photovoltaic Arrays[J]. Solar Energy Materialsand Solar Cells,2010,94(4):1441-1447.
(编辑 霍鹏)
Maximum Power Point Tracking of Photovoltaic Array Based on Improved Sliding Mode Control Technology
DANG Ke, LU Wenwen, YAN Gangui
(College of Electrical Engineering, Northeast Dianli University, Jilin, Jilin 132012, China)
In order to rapidly and effectively track the maximum power point of photovoltaic array, this paper designs a kind of sliding mode control method based on exponential approach law. According to characteristic of the output maximum power point, switching hyperplane of the system is designed and a sliding mode controller is used to collect system states from external hyperplane to the hyperplane. For weakening fluttering of the system at the same time of its verging to sliding mode surface, a critical value near to the switching hyperplane is designed. It is able to well control setting for parameters of approach law based on concept of exponential approach law. Simulating experiment indicates that this method is useful to rapidly and correctly track the maximum power point of the system and well weaken fluttering at the time of sliding mode control approaching to the sliding mode surface.
photovoltaic array; sliding mode control; exponential approach law; maximum power point tracking (MPPT)
2016-05-21
国家自然科学基金项目(51277024)
10.3969/j.issn.1007-290X.2016.10.003
TM615+.2
A
1007-290X(2016)10-0012-05
党克(1960),男,吉林吉林人。研究员,工学学士,主要从事新能源发电技术、电力系统电能质量方面的研究。
陆雯雯(1991),女,江苏徐州人。在读硕士研究生,主要从事新能源发电技术、电力系统电能质量方面的研究。
严干贵(1971),男,江西鹰潭人。教授,工学博士,主要从事电力电子技术、新能源发电方面的研究。
猜你喜欢
太阳能(2022年2期)2022-03-07
中国惯性技术学报(2019年6期)2019-03-04
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
中学生数理化·高二版(2016年5期)2016-05-14
北京航空航天大学学报(2016年4期)2016-02-27
中国学术期刊文摘(2016年2期)2016-02-13
燕山大学学报(2014年2期)2014-03-11
