
浅析一种适用于目卸车的气控目锁装置
2016-11-23 06:21:22刘国庆梁海强
专用汽车 2016年7期
刘国庆 梁海强
三河市新宏昌专用车有限公司 河北廊坊 065201
浅析一种适用于目卸车的气控目锁装置
刘国庆 梁海强
三河市新宏昌专用车有限公司 河北廊坊 065201

介绍了一种自卸车气控自锁装置的组成、工作原理及特点,并验证了气控自锁装置的使用安全性。该装置利用双作用气缸控制锁钩组件动作,可实现后门锁紧。
自卸车 气控自锁装置 可行性 结构特点
1 前言
目前,适用于自卸车上的自锁装置形式各异,结构有液压式、机械式,等等。相比而言,液压式自锁装置结构复杂,成本昂贵;机械式自锁装置是靠货箱的升降带动连动机构开启或锁紧后门,结构简单,但存在晚开、早锁的弊病。本文所介绍的气控自锁装置与以往使用的自锁装置相比具有较大的不同,该自锁装置以压缩空气为动力锁紧后门,通过改变压缩空气在装置中的流向而实现自锁装置的开启与闭合,操作简单,可控性强。
2 气控自锁装置的组成及工作原理
该自锁装置 主要由行程开关、两位五通电磁阀、双作用气缸、锁钩组件(锁钩、锁钩固定座、锁座)等部件组成(如图1、图2)。
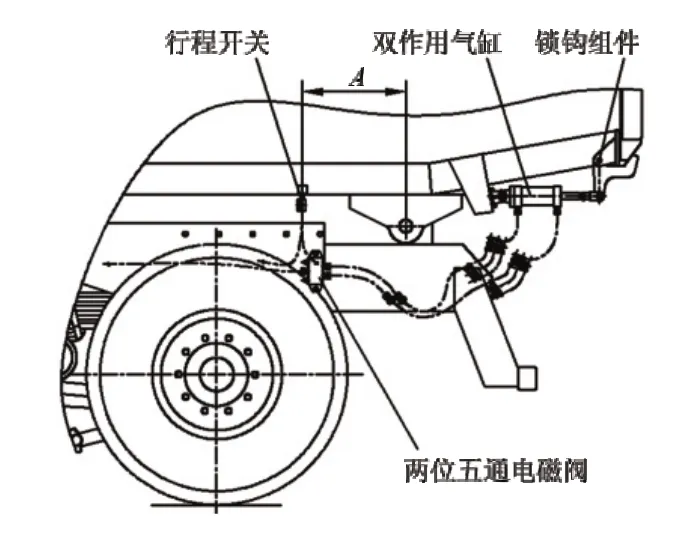
图1 气控自锁装置示意图

图2 气控自锁装置原理图
从图1和图2可以看出:行程开关以距后翻转轴为A的间距安装于副车架上(A值由行程开关的行程和预设货箱举升角度确定,预设货箱举升角度是指自锁打开时货箱的期望举升角度),同时连接并控制两位五通电磁阀;两位五通电磁阀从底盘储气筒取气并与双作用气缸连接;双作用气缸与锁钩组件铰接。
锁紧状态:设货箱处于平放状态时为初始状态,此时行程开关处于断开状态,两位五通电磁阀P-A、B-O口接通,双作用气缸的缸杆伸出,推动锁钩组件使自锁装置处于锁紧状态。
开启状态:当货箱开始举升并达到预设货箱举升角度时,行程开关接通,两位五通电磁阀动作使P-B、A-O口接通,双作用气缸的缸杆回收,拉动锁钩组件使自锁装置处于开启状态。
3 气控自锁装置的可行性分析
下面对气控自锁装置在可行性方面举例说明并加以验证。例如,自卸车货箱内尺宽度B=2 300 mm,内尺总高1 800 mm,底板尾部上翘10°,经测量后板上面距底板上沿为1 650 mm,即货箱内物料对后门板接触的最大高度所运货物为水沙,密度ρ约为1.15 t/m3;气控自锁装置使用的双作用气缸缸径D=100 mm,直接从底盘储气筒取气,以取气气压0.8 MPa计算,双作用气缸产生的推力N=πD2P/4=6.28 kN,气缸对锁钩缸旋转中心的力臂L缸=160 mm,锁钩与后门接触点对锁钩旋转中心的力臂L锁=95 mm,锁钩对后门作用力法向与水平面的夹角α=36°,最终每套气控自锁装置对货箱后门锁紧点处水平方向的分力N锁平=N缸·L缸cosα/L锁=8.557 kN,锁紧点处水平方向上的合力N合=17.114 kN,对后铰链轴的转矩M锁=N合×1.9=32.516 kN·m。如图3为其受力效果图。
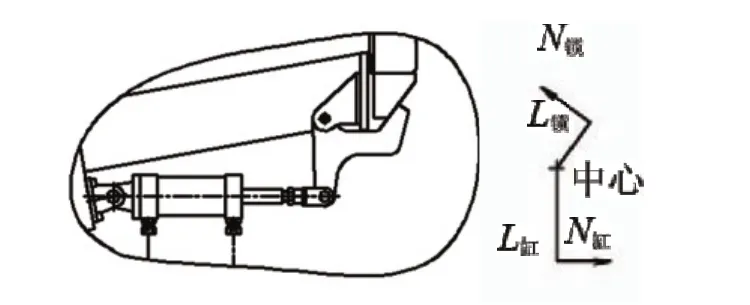
图3 气控自锁装置受力效果图
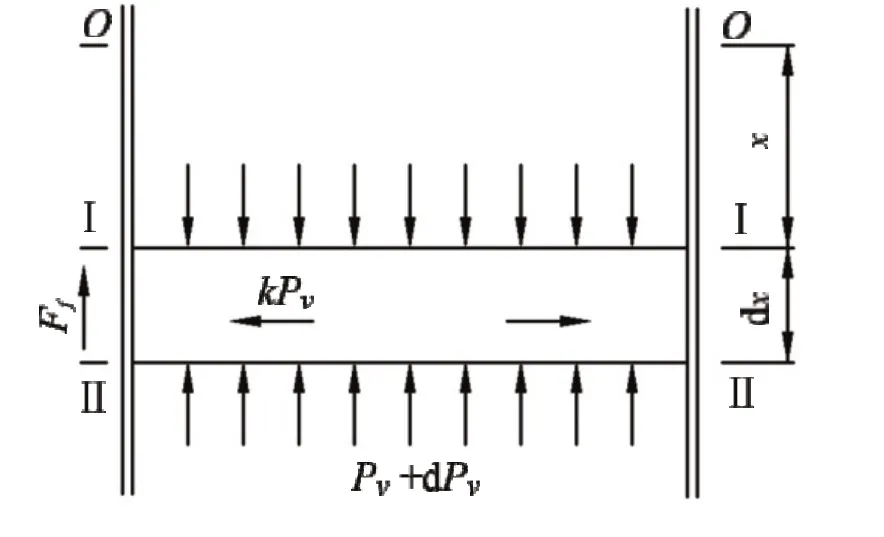
图4 物料受力分析图
如图4所示,货箱内物料深度为x的立面位置上截取一高度为dx的微元体进行研究,这一微元体的体积dv为:

式中,A为货箱的内尺长度,B为货箱的内尺宽度。
其质量dw为:

对这一微元体所受静力进行研究,设在微元体上部截面Ⅰ-Ⅰ上受到由物料产生的垂直压力为Pv,在整个截面上所受的压力为ABPv。
在微元体下部截面Ⅱ-Ⅱ上受到截面以上由物料产生的垂直压力为Pv+dPv,在整个截面上所产生的压力为AB(Pv+dPv)。
物料产生的垂直压力为Pv,对货箱产生的水平压力为Ph,假定垂直压力与水平压力的比值不变,即

式中,Ψ为松散物料内摩擦角最小值。
水平压力Ph是垂直作用在货箱门板内壁的,所以产生了沿壁面的压力 Pf为 :

沿壁面一周所产生的摩擦力为:

式中,μ为物料与货箱内壁的摩擦系数。
对以上各力的分析可以写出此微元体的静力平衡方程:

对式 (7)进行整理可得一阶常系数线性微分方程:

下面确定边界条件并求解方程式 (8)。
根据货箱所运输货物为水沙的情况,可以忽略物料与货箱内壁的摩擦系数,取μ=0,则式(8)可写成:

由式(9)可以得出关于Pv的积分方程:

则深度为x处的垂直压力Pv为:

将式(11)代入(3)得:

由此可以看出,随着深度的增加,物料对货箱侧壁的水平压力是呈线性分布的,当货箱深度为x时,则物料对货箱侧壁水平方向合力的积分方程为:

如图5所示,物料对后铰链轴的扭矩为:


图5 货箱后板受力效果图
假定松散物料内摩擦角最小值等于物料安息角,取ψ=30°,则由式(4)可得:k=0.3。由图5可知,物料深度取货箱内高的最大值,即x=1 650 mm。数据带入式(14)可得:M料=7.247 kN·m。
比较自锁装置与模块对后铰链转轴的转矩可得: η =M锁/M料=3.99。即该气控自锁装置的使用安全系数为4.5,大于1,故该装置满足使用要求。
4 气控自锁装置的结构特点
该气控自锁装置具有的结构特点如下:
a. 利用行程开关间接控制气路通断及方向,可以实现自锁装置的自动开合。在如图2原理图中,该装置利用行程开关的通断,控制两位五通电磁阀是否动作;当货箱平放时,行程开关处于断路状态,两位五通电磁阀不动作,此时电磁阀的PA、B-O口接通,压缩空气从储气筒出来,经电磁阀A口处进入双作用气缸的A口,双作用气缸杠杆伸出,气缸前腔空气经气缸A口进入电磁阀B口并从O口排出,双作用气缸缸杆在伸出的同时推动锁钩组件,使锁具进入锁紧状态;当货箱举升到设定角度时,行程开关接通,电磁阀动作,电磁阀内部的PB、A-O接通,压缩空气从电磁阀P口进入到B口后流出,再进入到双作用气缸B口,气缸缸杆开始回收,同时气缸后腔空气开始从A口流经电磁阀A口并从阀的O口排出,在气缸缸杆回收的同时拉动锁钩组件,使自锁装置处于开启状态。
b. 锁紧形式为弹性锁紧,可以保证自锁装置始终处于最佳锁紧状态。该装置与底盘气源联通,依靠压缩空气提供动力锁紧自锁。由于空气的高压缩性,使自锁装置处于弹性锁紧状态,当锁钩组件与后门板存在间隙时,在气压的作用下,气缸杆会继续伸出并推动锁钩组件,使锁钩组件与后门板紧密接触,从而迫使自锁装置始终处于最佳锁紧状态;正是由于这一点,当安装多套自锁装置时,每套自锁都会处于最佳的锁紧状态,可以有效避免刚性自锁受力不均的情况,从而在一定程度上提高自锁的使用寿命。另外,当货箱变形、锁具磨损而使两者间产生小的间隙时,气控自锁装置能够自动调节锁钩的锁紧位置,从而使锁具处于最佳的锁紧状态,减少了人工调整环节。
c. 通过合理选择行程开关与后翻转轴的距离A值,可以有效控制锁具开合时间,消除晚开、早锁的弊病。从图1示意图可以看出,A值越小,锁具开合时货箱的举升角度越大,越容易出现晚开、早关;A值越大,锁具开合时货箱的举升角度越小,可以实现早开、晚关;值得注意的是,随着A值的增大,运输过程中受路况影响货箱与副梁非预期离开时锁具打开的可能性也会越大,因此需要合理选择A值,从而在保证行车安全的同时,有效消除晚开、早锁的问题。
5 结语
本文通过对自卸车气控自锁装置的浅析,验证了该气控自锁装置在自卸车领域具有一定的优势:
a. 该装置使用电路控制气路,控制方式简单,弹性锁紧效果好,可控性强;
b. 利用车辆自身气源,不用单设动力源,可消除晚开、早锁的弊病,动作迅速且准确无误,工作可靠性高;
c. 结构简单,安装、维护方便,成本低,使用性能好,适用性强。
该自卸车气控自锁装置优势明显,产品的市场潜力大,使用后可提升产品的竞争力。
Analysis of A Kind of Pneumatic Locking Device Applied to Dump Truck
LIU Guo-qing et al
Pneumatic locking device of a dump truck are introduced, the device using the double-acting cylinder control components for locking action, door lock tight after implementation. And introduced the composition and working principle of pneumatic selflocking device, easy to verify the safety of using pneumatic locking device, and analyzes the structure characteristics of the pneumatic locking device. A pneumatic locking device for dump truck is introduced, as well as its working concept and features. The safety of pneumatic locking device was proven. Using double-acting cylinder control components, the pneumatic locking device can make rear door locking tightly.
dump truck; pneumatic locking device; feasibility; structural characteristics of
刘国庆,男,1985年生,助理工程师,现从事自卸车设计工作。
U469.4.03
A
1004-0226(2016)07-0100-04
猜你喜欢
少先队活动(2022年9期)2022-11-23 06:55:48
环球市场(2021年11期)2021-01-15 23:24:45
新商务周刊(2019年24期)2019-12-22 05:47:21
数码世界(2018年6期)2018-07-12 01:08:04
科技创新与应用(2017年28期)2017-09-22 14:51:21
数理化解题研究(2017年6期)2017-04-17 07:01:28
寻根(2016年4期)2016-11-18 03:49:16
机械工程师(2015年9期)2015-02-26 08:38:27
安徽文学·下半月(2014年2期)2014-12-11 16:50:38
物理教师(2014年9期)2014-10-27 04:54:18
