
电涡流传感器前置放大器的设计
2016-11-22 08:23周国扬江国栋
化工自动化及仪表 2016年11期
周国扬 江国栋
(1.江苏苏美达五金工具有限公司,南京 210061;2.南京工业职业技术学院能源与电气工程学院,南京 210046)
电涡流传感器前置放大器的设计
周国扬1江国栋2
(1.江苏苏美达五金工具有限公司,南京 210061;2.南京工业职业技术学院能源与电气工程学院,南京 210046)
电涡流传感器检测导电材料时会产生微弱的电流信号,要实现测量的高灵敏度和稳定性,前置放大器抑制噪声、漂移是设计的关键。首先,建立放大器噪声模型找出主要噪声源,用带通滤波网络抑制宽带噪声;其次,选用直流负反馈放大器抑制增益漂移,超级伺服电路抑制直流电平漂移;最后,通过PCB板插孔铜镀层测厚仪的前置放大器进行电路理论分析、仿真和试验验证。试验结果表明:前置放大器能将微弱信号从噪声中分离出来,放大后信号电平足以进行后续的信号处理和显示,并满足信号电平分辨率在1μm以下的要求。
前置放大器 电涡流传感器 微弱信号 漂移
电涡流检测技术是以电磁感应原理为基础建立的一种无损检测方法[1~3]。不同导电材料制作的工件在交变磁场作用下会产生不同振幅和相位的涡流值,从而可以检测出工件的缺陷,或测量出工件镀层和涂膜的厚度。电涡流传感器拾取感应电压很小,信号常常淹没在噪声中,而无法直接提取和处理。前置放大器用来抑制噪声并放大和提取感应信号,文献[4]介绍了前置放大器采用平衡电桥加差分放大器AD830的方案;文献[5,6]采用仪表放大器AD620对感应信号进行放大,二者均采用差分电路抑制共模噪声,而未通过控制带宽来抑制宽带噪声,即使后续用软件小波去噪提高了信噪比,但是改善信噪比的效果相当有限,同时未采用措施抑制放大器漂移,会造成增益误差和直流电平偏移,很难保证测量结果的准确性。
为了解决上述问题,前置放大器应具有抑制噪声和漂移的功能,把感兴趣的微弱信号从干扰噪声中分离出来,并将信号放大到足够进行后续信号处理和显示。其中涉及前置放大器,为了获得更好的性能,采用两级运放级联的直流放大电路,避免了交流耦合所用电容器等储能元件存在恢复时间的问题,从而影响放大器性能;将放大器配置成深度负反馈以抑制增益漂移;采用超级伺服电路抑制放大电路直流电平漂移;应用带通滤波网络提高放大电路的选择性,用窄带滤波方式抑制宽带噪声,突出有用信号。在理论分析和仿真试验的基础上,通过印刷线路板(Printed Circuit Board,PCB)插孔铜镀层测厚仪电涡流传感器的前置放大器进行进一步实验验证。
1 电涡流传感器原理
电涡流检测是基于电磁感应原理的一种无损检测方法[7,8],它适用于各种导电试件的检测。电涡流传感器传感检测方法有阻抗方式和发射-接收方式两种。发射-接收方式的接收线圈由两个反向绕制的匹配线圈串联组成(又称差分线圈),对接收线圈温漂和外部共模干扰有抑制作用,因此,发射-接收方式传感器性能优于阻抗方式。PCB板插孔铜镀层测厚仪电涡流传感器选用发射-接收方式,电涡流传感器发射-接收方式的原理如图1所示。
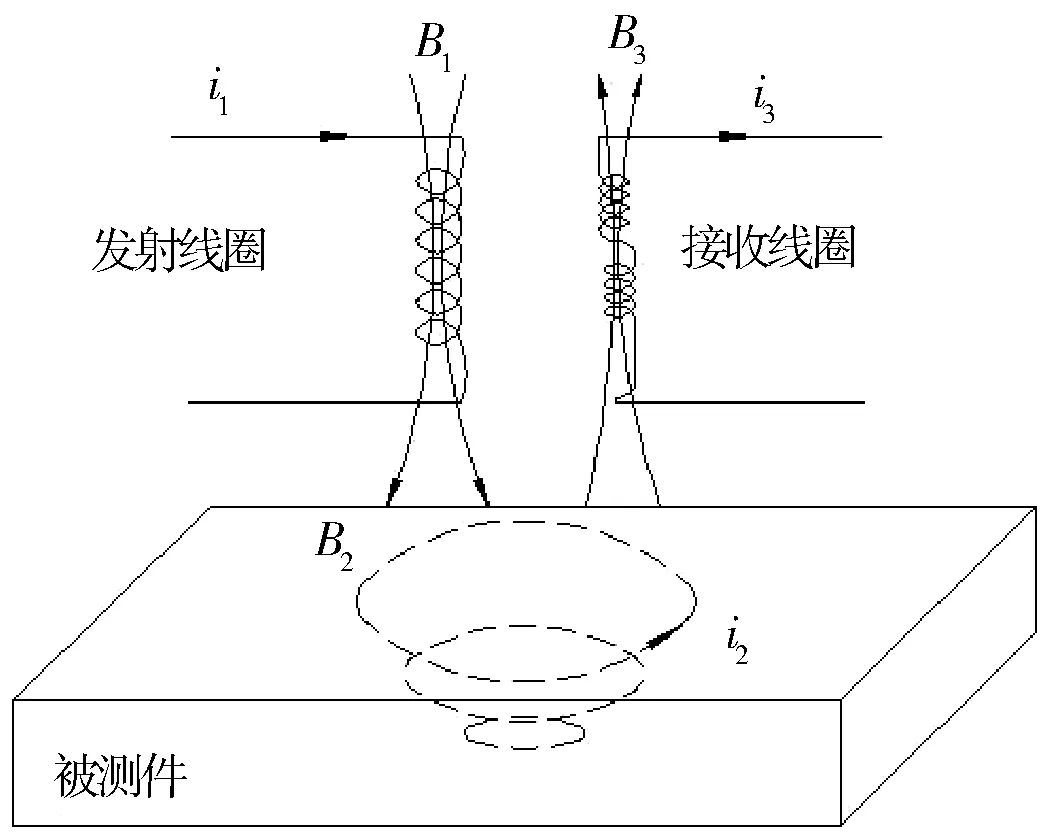
图1 发射-接收方式工作原理示意图
当给发射线圈施加一个交变电流为i1的激励信号时,根据电磁感应定律,在发射线圈周围会产生一个交变磁场B1,这个场称为一次场。如果把发射线圈靠近被测导体试件,B1会在导体试件内感应出一个涡流信号i2;同样i2也会在周围产生一个交变磁场B2,这个场称为二次场。根据楞次定律,B2会阻碍一次场B1的变化并使B1减弱,两个磁场在空间形成一个叠加磁场,被测试件愈厚,衰减量愈大。B2在接收线圈产生感应电压,由于接收线圈垂直安装,靠近被测试件感应最强,引起两个线圈感应电压不平衡,从而得到一个电涡流接收信号。接收线圈得到毫伏级微弱信号,图2为实际电涡流传感器的接收信号,可以看出,信号淹没在噪声中难以分辨,无法进行后续信号处理。
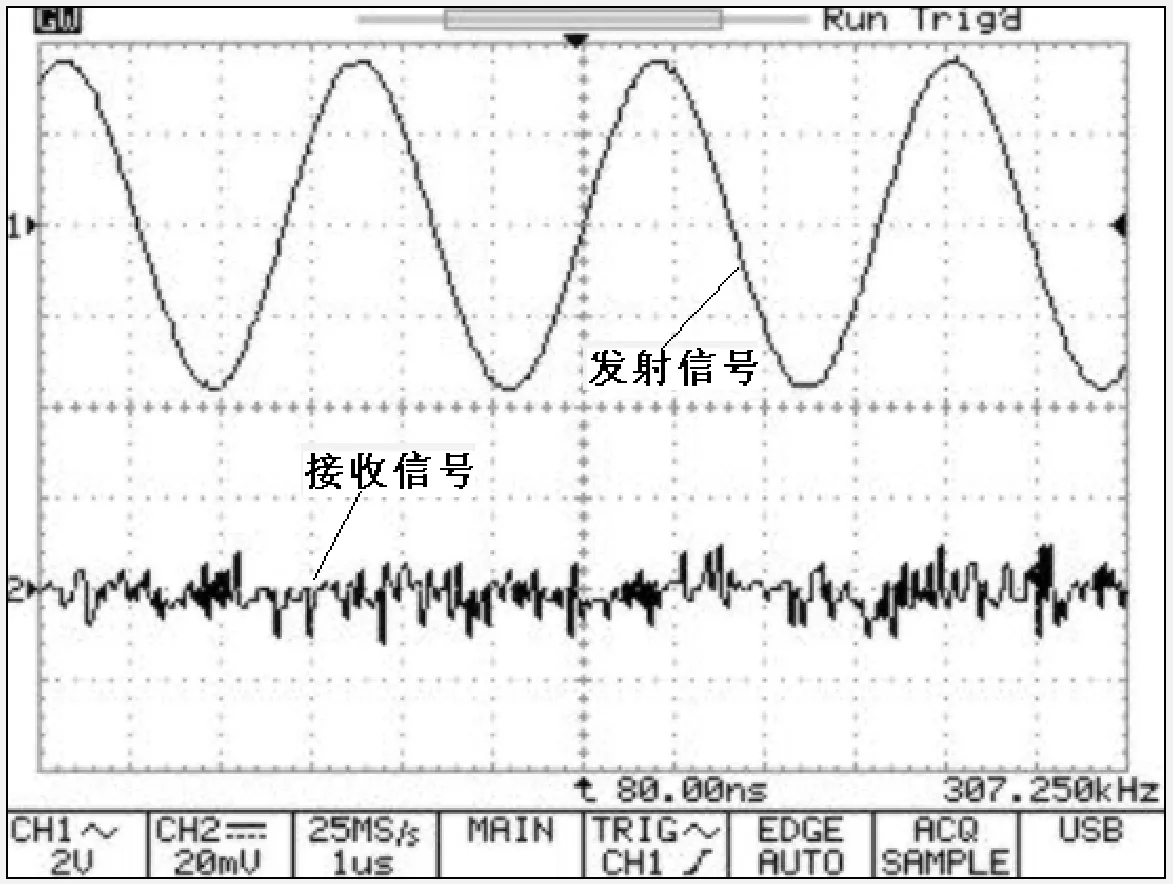
图2 电涡流传感器的接收信号
2 前置放大器设计
2.1设计要求
根据图2所示的电涡流传感器接收信号的特征,要从噪声中提取信号,涡流检测用的前置放大器应具有以下基本特点:
a. 灵敏度必须足以给出适用于处理和显示的信号电平;
b. 信噪比必须足够大,以使感兴趣的最小信号能与噪声清楚地区别开来;
c. 放大器电路的选择性必须能突出有用信号,并滤除干扰噪声信号;
d. 放大电路有相当高的稳定性,无需经常调整电路参数;
e. 响应速度足够快,以便在扫描检查时,能显示全部有用信号;
f. 设计需满足各种环境条件,如温度、振动等。
对于PCB板插孔铜镀层测厚仪,应用电涡流检测技术对PCB通孔的铜镀层厚度进行测量。铜镀层导体的检测频率约为300kHz,属于高频微弱信号检测的技术范畴[9~12]。
2.2方案和电路
前置放大器的设计方案如图3所示。电涡流传感器产生的接收信号源i1(t)经带通滤波网络窄带滤波后,其带宽大幅度缩小,从而有效抑制信号中的噪声,使放大器有足够高的信噪比;去噪后的接收信号i1(t)经反相、同相两级直流放大,其电压增益K1K2,输出信号u2(t)有足够高的输出电平,保证了检测所需的高灵敏度;运算放大器电路自身存在直流漂移,经高增益直流放大后会产生高的直流电平偏移,严重影响测量精度,故引入由放大器和积分电路构建的超级伺服电路来抑制直流电平偏移[13],以上技术措施保证前置放大器具有设计要求的基本特点。前置放大器设计包括:放大器的噪声分析、带通滤波网络、高增益负反馈直流放大器和超级伺服电路的电路设计。
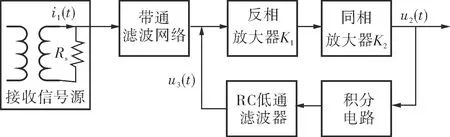
图3 前置放大器设计方案
2.2.1放大器的噪声分析
前置放大器为了获得更好的性能,采用两级直流放大器级联。一般来说,第1级采用最高的增益。这样第1级的噪声源将占主要部分,后面几级引起的误差就可以忽略不计。很多情况下,第1级运放用低噪声高频宽带运放,后面几级则采用低成本的运放,从而获得高性价比的系统。
放大器噪声源[9~12]如图4所示,图中信号源内阻Rs的热噪声为et,Rf的热噪声为ef;en和in分别为放大器的输入噪声电压密度和噪声电流密度。设et、en和in互不相关,K=Rf/Rs,输出噪声电压密度eno的计算式为:

(1)
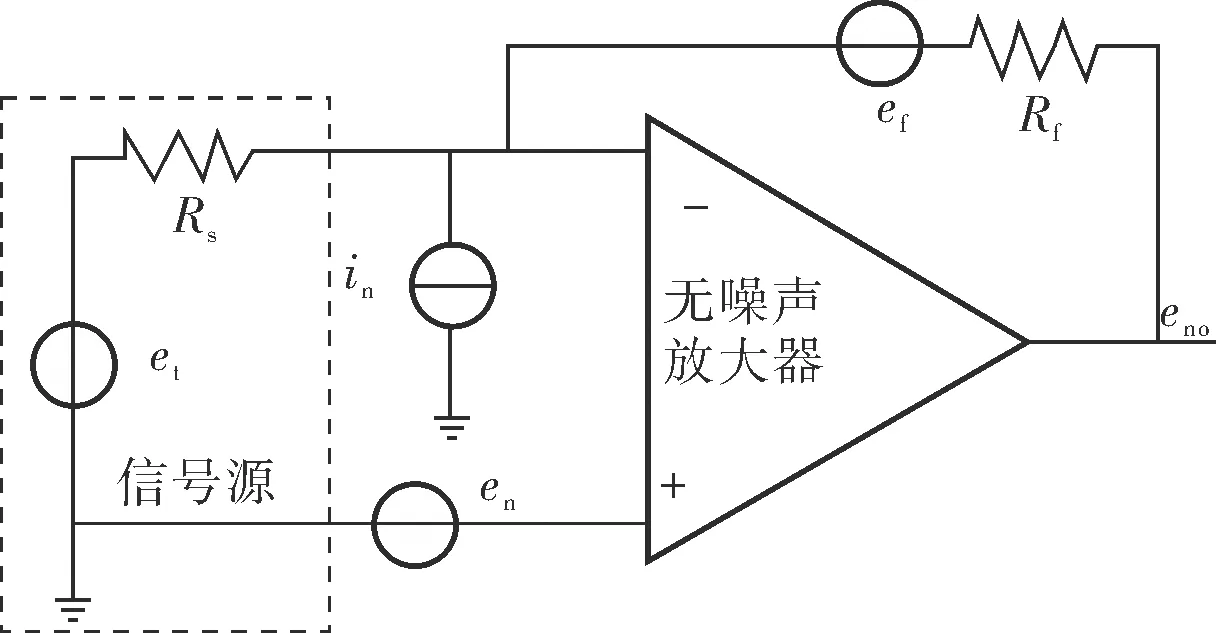
图4 放大器噪声源
由式(1)可知,减小Rs就可以减小et和inRs。将eno折合到输入,输入噪声密度eni=eno/(K+1),计算eni与et、en和inRs的比值,如果比值大于3,该项噪声源可以忽略不计,从中可以找出主要噪声源。
电涡流传感器接收信号源属于低阻,考虑到阻抗匹配条件,可满足Rs<<1kΩ;放大电路一般选用低噪声运算放大器,按照ADI公司的标准:

通过引入带通滤波网络实现窄带滤波,大幅减小了放大器的带宽。en噪声由1/f和宽带噪声组成,en可转换为输入噪声均方根值Eni和峰峰值,它与带宽BW相关,二者的关系如下:

(2)
由式(2)可知,带宽越窄,Eni越小,窄带滤波可有效抑制噪声电平,从而达到减小放大器输出总噪声的目的;同时,滤波器中心频率为300kHz,电路带通频段比1/f噪声的拐点频率大10倍以上,en的1/f噪声便可以忽略不计,只考虑放大器的宽带噪声,选用低en值低噪声运放器件即可。
2.2.2带通滤波网络
带通滤波网络由L1C1串联谐振回路组成,作为反相放大器的输入电路,使放大器具有带通滤波器功能,对输入信号噪声进行窄带滤波以抑制噪声,前置放大器的前端电路如图5所示。
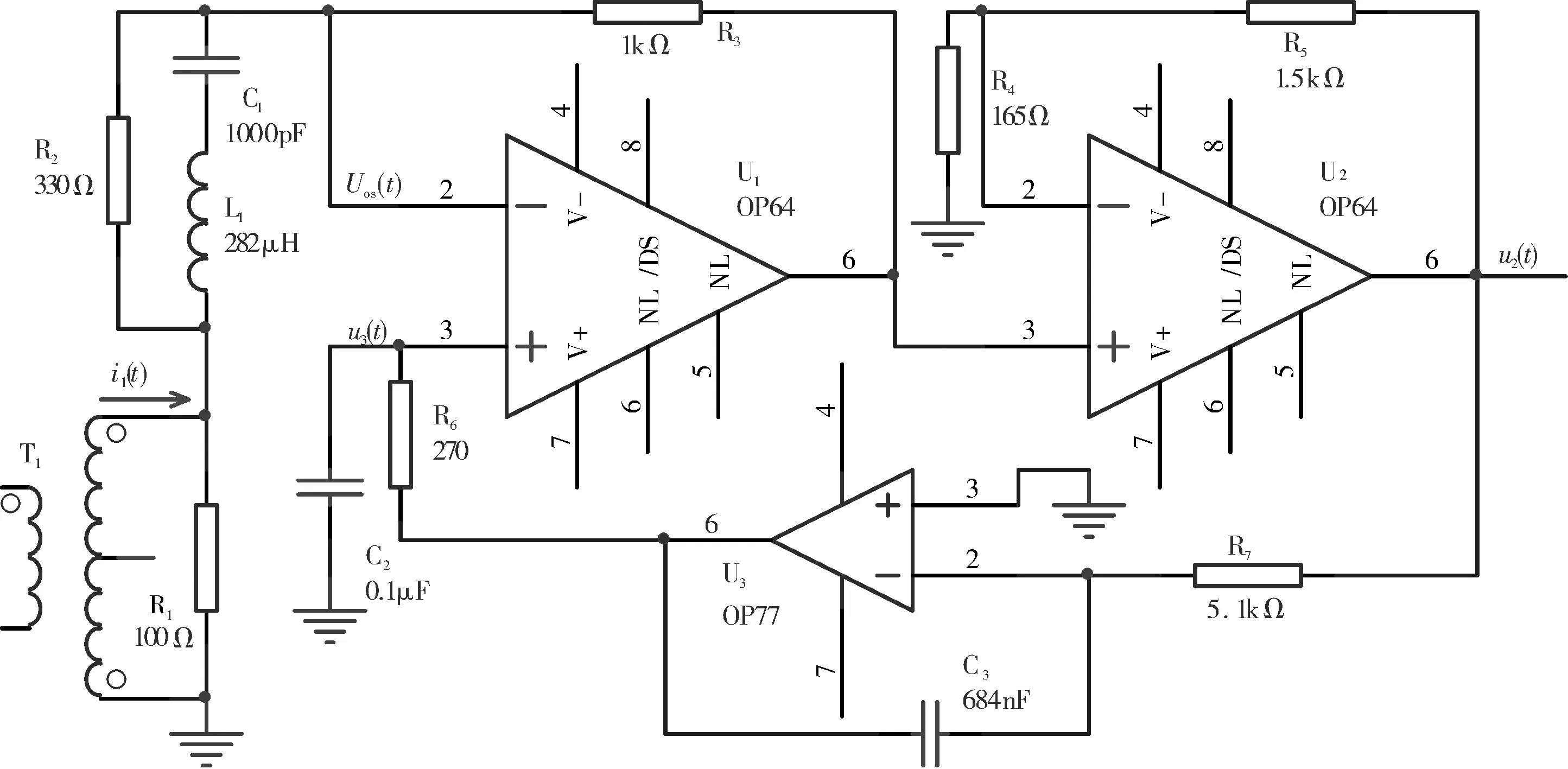
图5 前置放大器的前端电路
由图5可知,放大器增益K1的计算式为:
K1=-R3/[(jωL1+1/jωC1+RL)//R1//R2]
(3)
谐振回路选用电容C1=1000pF,电感的电感量L1=282μH,品质因数Q=30,电感电阻RL=17.7Ω。当谐振回路谐振时,K1取得最大值,即:
K1=-R3/(RL//R1//R2)=-70
谐振回路3dB带宽BW=f0/Q=10kHz。分析计算结果表明,选频网络谐振时产生低阻抗效应使前级放大器具有高的电压增益;同时,对信号中的噪声进行窄带滤波,大幅提高了信号的信噪比。
2.2.3直流放大器
前置放大器由两级低噪声负反馈直流放大器级联组成(图5),前级U1为反相放大器,后级U2为同相放大器。选用直流放大器可以省略放大器级间的耦合电容器,避免了耦合电容器存在恢复时间的问题而影响放大器的性能。采用负反馈方式可使放大器增益漂移减至最小,因为负反馈使增益成为无源元件变换系数的主要函数,而不是与温度有很大关系的晶体管β系数或场效应管跨道gm相关,运算放大器采用深度负反馈通常十分稳定。谐振时放大器增益K的计算式为:
K=K1K2=-R3/(RL//R1//R2)×(1+R5/R4)
(4)
(5)
根据已知的en、K和BW值,计算得到Eno=560μV。根据高斯正态分布曲线,按照±3σ标准差估算,得到噪声峰峰值Epp=6Eno=3.36mV。由Epp值表明,信号中的噪声分量较大,需通过后续的相敏检波电路进一步降噪检波。
2.2.4超级伺服电路
OP64运放的输入偏移电压Vos=1mV,在放大电路高增益K=700条件下,输出信号会产生最大0.7V的直流偏移,这对精密测量电路来说是不可接受的。通过配置积分器U3电路和低通滤波器R6C2,围绕高频放大器U1和U2构建一个伺服电路系统来补偿直流偏移电压。根据线性控制系统理论,U1、U2和U3构建了抗干扰单输入单输出(SISO)闭环控制系统[14,15],系统输出不受系统干扰Vos的影响,即对于输入Vos(s)≠0,稳态输出U2(s)=0。系统需均衡信号带宽与伺服放大器响应时间,满足伺服电路不对放大器的增益和相移产生影响,确保信号的完整性。伺服电路的控制系统框图如图6所示。
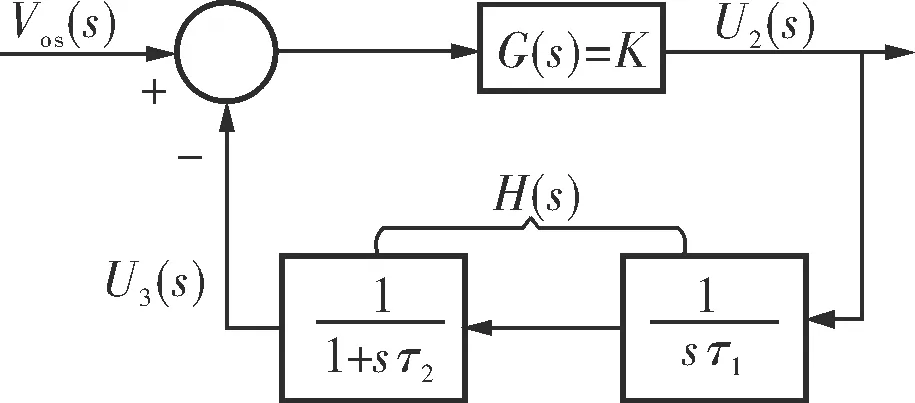
图6 伺服电路的控制系统框图
由图6可得抗干扰控制系统的传递函数为:
(6)
图6所示的反馈控制器H(s)中包含有一个积分器(1/sτ1),反映传递函数的分子在原点处有一个零点,这说明当s→0时期望输出U2(s)=0,即Vos(s)≠0时输出直流偏移为零,对直流电平偏移加以充分的抑制。
将τ1=R7C3=3.5×10-3,τ2=R6C2=2.7×10-5,代入式(6)得到的特征方程为:
s2+3.5×104s+7.4×109=0
(7)
求解方程(7),得到主根s1,2=-1.85×104±8.4×104j,方程根轨迹都在s左半平面。根据解方程稳定判据准则,判定系统是稳定的。此处的积分器U3选用低失调(Vos=10μV)、低温漂(TCVos=0.1μV/℃)精密放大器OP77,满足系统更好地抑制直流电平温漂的要求;低通滤波器R6C2限制伺服电路带宽,最小化控制噪声引入到信号放大器的输入端。
3 仿真与试验结果
对笔者介绍的涉及前置放大器系统的幅相频率特性进行仿真试验,测量系统的带宽和相位特性,检验系统带宽与伺服放大器响应时间的均衡性;同时,通过电涡流传感器检测标准试件,用示波器测量前置放大器的输出信号,并对波形质量进行分析。用以上仿真与电路试验进一步验证电路设计方案的正确性。
3.1超级伺服频域仿真
由式(6)和已知伺服系统的环路参数,利用Matlab仿真生成的系统频率响应曲线如图7所示。可以看出,当频率为1Hz时放大器增益约为-33dB,从工程上来说,放大器直流增益可视为零,这说明当Vos=1mV时直流输出电平为零,放大器直流偏移被充分抑制;当频率为300kHz时,在带宽10kHz条件下,放大器增益约为57dB且稳定,此时相移为0°,伺服电路对放大器的增益和相位未造成影响。由此验证系统很好地解决了放大器带宽与伺服放大器响应时间的均衡问题。
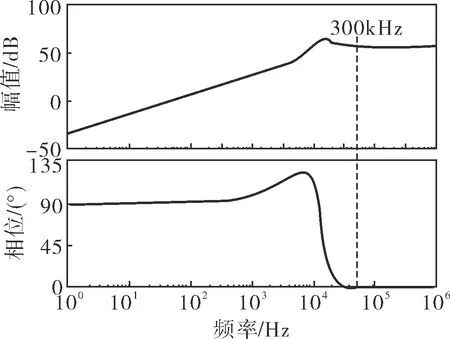
图7 频率响应曲线
3.2试验电路测试
采用电涡流传感器测量德国Fischer公司的标准试件,测量镀层最薄(3.5μm)和最厚(69.5μm)两种极端条件,前置放大器的输出波形如图8所示。由图分析得到,试件最厚时接收信号幅值约700mV(电压峰峰值),试件最薄时接收信号幅值约75mV(电压峰峰值),试件镀层越厚,涡流二次场越强,接收线圈感应电压就大,前置放大器输出也越大;反之,放大器输出就变小。测量数据表明:输出信号幅值达到足以后续处理和显示的电平要求,放大器输入端噪声电平得到了充分抑制,信号从噪声中分离出来。示波器在DC状态下测得波形,波形上下对称,无直流电平偏移现象发生,保证了测量的准确性。
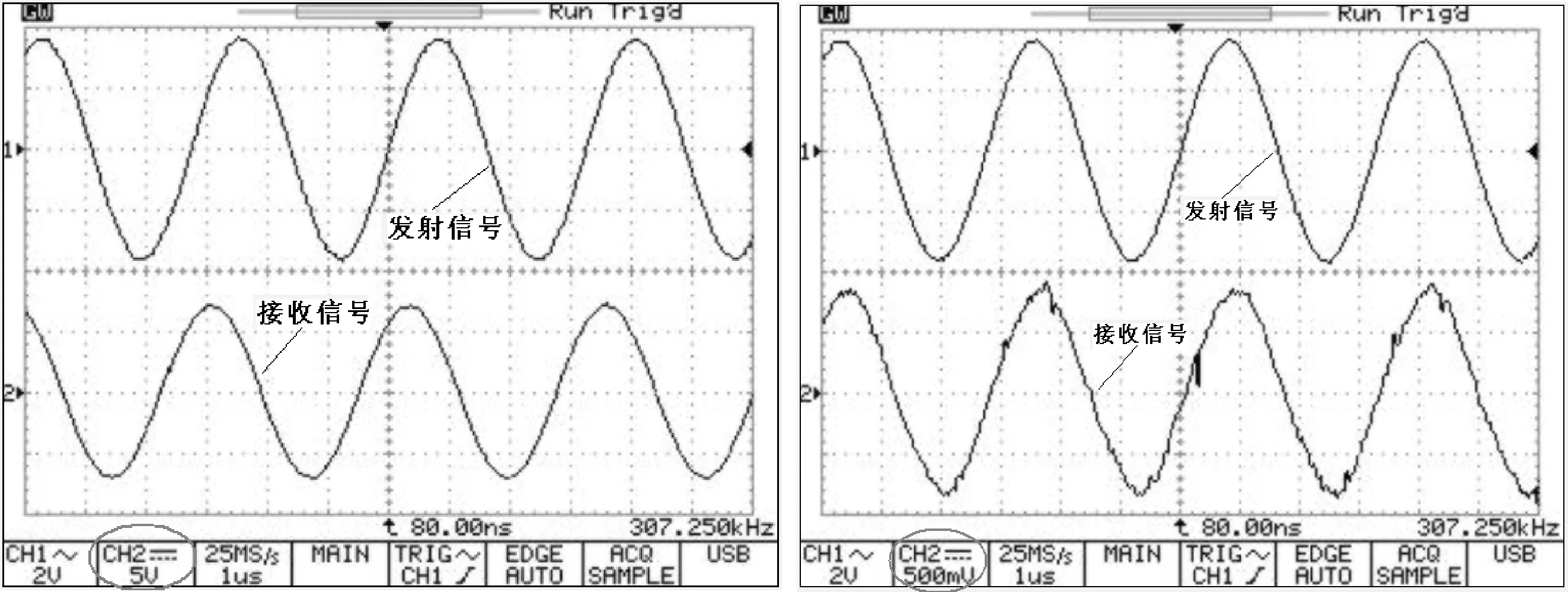
a. 69.5μm试件 b. 3.5μm试件图8 前置放大器输出波形
4 结束语
笔者给出了电涡流传感器前置放大器的设计方案。在电路设计过程中,首先,进行放大器噪声分析并找出主要噪声源,根据主要噪声源是宽带噪声这一特点,引入带通滤波网络用窄带方式抑制宽带噪声;其次,放大器采用直流深度负反馈方式来抑制增益漂移,构建了抗干扰SISO系统组成超级伺服电路,从而抑制直流电平漂移;最后,对设计方案通过理论分析、仿真及电路试验等技术方法进行验证。结果表明,相比现用的一些设计方案,此前置放大器输出信号具有高信噪比,能将有用的微弱信号从噪声中分离出来,放大后信号电平足以进行后续的信号处理和显示,并满足信号电平分辨率在1μm以下的要求。关于前置放大器的设计和微信弱信号检测的方法具有重要的推广意义。
[1] 美国无损检测协会.美国无损检测手册:电磁卷[M].北京:世界图书出版社,1996:1~296.
[2] 宋琦华,毛义梅,雷华明.基于DDS技术的脉冲涡流检测系统[J].计算机测量与控制,2011,19(8):1817~1820.
[3] 陈晓雷,王秀琳.基于涡流技术的检测系统设计[J].郑州轻工业学院学报(自然科学版),2010,25(6):67~70.
[4] 曹钊滨,宋文爱,杨录,等.桥式涡流检测系统的研究与设计[J].仪表技术与传感器,2013,(3):61~63.
[5] 姜守安.奥氏体不锈钢脉冲涡流检测技术研究[D].南京:南京航空航天大学,2013.
[6] 杨宾峰.脉冲涡流无损检测若干关键技术研究[D].长沙:国防科学技术大学,2006.
[7] 来超.多涂层厚度涡流无损检测技术及其实现方法研究[D].成都:电子科技大学,2015.
[8] 张德俊.基于涡流无损检测技术的导电涂层厚度检测方法研究[D].成都:电子科技大学,2015.
[9] 高晋占.微弱信号检测[M].北京:清华大学出版社,2011:40~110.
[10] 于向前,陈鸿飞,邹鸿,等.极弱电流信号检测电路中前置放大器模拟研究[J].核电子学与探测技术,2014,(12):1514~1517.
[11] 张滨,杨银堂,李跃进.利用噪声抵消技术设计低噪声放大器[J].电路与系统学报,2013,18(1):408~411.
[12] 邱贺,段永红.用于感应式磁传感器前置放大器的研制[J].仪表技术与传感器,2015,(1):22~23.
[13] 远坂俊昭(日),著,彭军,译.测量电子电路设计-模拟篇[M].北京:科学出版社,2007:17~24.
[14] D′azzo J J,Houpis C H,Shelcon S N,著,张斌武,王玲芳,孙鹏,译.基于MATLAB的线性控制系统分析与设计[M].北京:机械工业出版社,2008.
[15] 江国栋,丁强.一种涡流传感器恒流驱动电路设计[J].工矿自动化,2014,40(11):13~17.
DesignofPre-amplifierforEddyCurrentSensors
ZHOU Guo-yang1, JIANG Guo-dong2
(1.JiangsuSUMECHardware&ToolsCo.,Ltd.,Nanjing210061,China; 2.CollegeofEnergyandElectricalEngineering,NanjingInstituteofIndustryandTechnology,Nanjing210046,China)
Applying eddy-current sensor to detect conductive materials can generate weak current signals. Suppressing both noise and shift becomes into the key factor in pre-amplifier design so as to achieve high sensitivity and high stability in the measurement. In which, having amplifier’s noise model built to find out main source of the noise and the band-pass filter employed to suppress broadband noise; then having amplifier with direct-current negative feedback selected to suppress the gain shifting and the super servo circuit adopted to suppress the direct-current level shifting; finally, having the pre-amplifier applied in PCB copper coating’s thickness measurement device employed for theoretical analysis, simulation and experiment. Experimental results show that, the pre-amplifier can separate weak signals from noise; and the amplified signal can satisfy subsequent requirement of the signal process and display where resolution ratio of the signal is smaller than 1um.
pre-amplifier, eddy-current sensor, weak signal, shifting
TH89
A
1000-3932(2016)11-1176-06
2016-08-15(修改稿)
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
装备制造技术(2020年11期)2021-01-26
中国生殖健康(2020年5期)2021-01-18
教书育人(2020年11期)2020-11-26
当代陕西(2020年13期)2020-08-24
电子制作(2019年19期)2019-11-23
电子制作(2018年19期)2018-11-14
中国生殖健康(2018年5期)2018-11-06
通信电源技术(2018年5期)2018-08-23
电子制作(2016年1期)2016-11-07
