基于Canny理论的自适应彩色图像边缘检测
2016-11-17 11:11:07徐成鸿郭明磊
湖北第二师范学院学报 2016年8期
舒 军,程 启,徐成鸿,刘 伟,郭明磊
(1. 湖北工业大学 电气与电子工程学院, 武汉 430068;2.黄石日报传媒集团,湖北 黄石435003)
基于Canny理论的自适应彩色图像边缘检测
舒 军1,程 启1,徐成鸿1,刘 伟1,郭明磊2
(1. 湖北工业大学 电气与电子工程学院, 武汉 430068;2.黄石日报传媒集团,湖北 黄石435003)
图像信息是图像边缘检测的基础,图像边缘检测是图像特征提取的首要条件。针对彩色图像转换成灰度后会丢失图像信息和传统Canny算子需要人工设定高低阈值的问题,提出了一种基于Otsu的自适应最佳阈值的Canny彩色图像边缘检测算法,实验结果表明,该算法在保证自适应的同时,在保留边缘细节方面也取得了较好的效果。
自适应方法;Otsu;梯度幅值阈值;形态学;Canny算子;彩色图像
图像边缘是数字图像最基本的特征,在机器视觉领域人们对图像边缘检测展开了大量的研究,并取得了一系列的成果。经典的边缘检测算法认为边缘主要表现为影像上局部区域特征的不连续性。传统的边缘检测算法是基于一阶的Roberts[1]、Sobel[2]、Prewitt[3]算子。这些算子的优点是算法简单、计算速度快;缺点是对噪声很敏感,在实际应用中效果并不好[11]。1986年Canny提出了基于最优准则[4~5]的边缘检测算子,该方法具有检测精度高、信噪比大等特点,因此在边缘检测领域得到了广泛应用。
传统Canny[6]算子的计算需要人工设定高低阈值,容易出现检测出虚假边缘的现象;针对Canny算子的不足,提出一种基于Otsu自适应梯度幅值的最佳全局阈值处理,再用形态学[7]方法对结果进行处理。实验结果表明,该算法具有较强的自适应性,并且在保留边缘细节方面取得了更好的效果,达到了预期的目的。
1 HSI颜色空间
研究表明,在彩色图像中大约有90%的边缘与灰度图像中的边缘相同,而且有10%的边缘在灰度图像中是检测不到的[8]。目前大部分彩色图像边缘检测是在RGB颜色空间中实现的,但RGB颜色空间的主要缺点是不能直接从RGB数值中估计出颜色的色度、饱和度和亮度等感知属性。为了克服RGB空间的不均匀和不直观性,对彩色图像处理时可以采用更符合人类视觉特性的HSI颜色空间[9]。
2 Canny算法的原理
传统的Canny算子有四个步骤:
(1)采用高斯滤波函数对图像进行预处理。
(2)用一阶微分计算图像的梯度幅值和梯度方向。
(3)对梯度幅值进行非极大值抑制,保留局部梯度值的最大点。
(4)采用双阈值方法检测并连接边缘.
2.1 图像去噪
图像去噪的二维高斯滤波器方程为:
(1)
计算二维滤波器的一阶偏导,得到两个一维滤波器。其中是高斯函数的标准差,控制图像平滑的程度。
2.2 计算梯度幅值和方向
图像x和y方向上的一阶偏微分P(x,y)和Q(x,y):
p(x,y)≈
(2)
Q(x,y)≈
(3)
通过计算2*2邻域矩阵的平均有限差分,并作为x和y的偏微分,得到图像的幅值和方向分别为:
(4)
θ(x,y)=arctan(Q(x,y),P(x,y))
(5)
2.3 非极大值抑制
进行非极大值抑制是为了得到精确和细化的边缘信息。即判断像素点的梯度值在其梯度方向的八邻域范围内是否为最大值,如果是则是边缘,否则为零。
2.4 检测并连接边缘
设定两个阈值TH和TL(TH>TL且TL=0.4TH),对非极大值抑制的结果进行双阈值处理,可以得到两个检测结果,分别是以高阈值TH和低阈值TL分割得到的图像T1和T2。图像T2保留的边缘信息比较多,图像T1的噪声少,所以以图像T1为基础,以图像T2为补充进行边缘连接获得最终的边缘检测结果。
3 OTSU方法自适应设定阈值
最大类间类方差法(Otsu方法)是1979年由Otsu提出的基于类间方差最大化的一种自动的非参数非监督的阈值选择法,一直被认为是分割阈值自动选择的最佳方法。其基本思想是用阈值将图像分为两类,并计算这两类的类间最大方差时的阈值。
经过非极大值抑制后的图像梯度幅值分为[0,1,2,3,…,L]个不同梯度级,ni表示梯度幅值为i的像素数。图像中的像素总数为N=n0+n1+n2+…+nL-1,梯度幅值i出现的概率为Pi=ni/N。设梯度幅值小于TL的像素集合为C0,梯度幅值介于TL和TH像素集合为C1,梯度幅值大于TH像素集合为C2;概率分别为P0(TL)、P1(TL,TH)、P2(TH);方差分别为σ2(TL)、σ2(TLTH)、σ2(TH)。每类的概率为:
(6)
(7)
(8)
每类的梯度幅值的均值为:
(9)
(10)
(11)
每类方差计算公式:
(12)
(13)
(14)
整个图像的梯度幅值均值:
u=P0(TL)u0(TL)+P1(TL,TH)u1(TL,TH)+P2(TH)u2(TH)
(15)
间类方差可以定义:
(16)
基于类间方差最大准则得到划分3类的双阈值:
(17)
满足式(16)和(17)最大的σb对应的TL和TH就是所求的阈值。
4 形态学
图像形态学处理包括膨胀、腐蚀、开运算和闭运算。设f(x,y)待处理的图像,b(s,t)为形态学结构元素,则形态学运算定义如下:
膨胀:f⊕b=max{f(x-s,y-t)+b(s,t)}
(18)
腐蚀:fΘb=min{f(x+s,y+t)-b(s,t)}
(19)
开运算:f·b=(fΘb)⊕b
(20)
闭运算:f·b=(f⊕b)Θb
(21)
膨胀可以桥接裂缝,腐蚀缩小细化二值图像将小于结构元的图像细节从图像中滤除;开操作断开较窄的狭颈并消除突出物,闭操作弥合较窄的间断和细长的沟壑,消除小的孔洞,填补轮廓线中的断裂。
5 基于Otsu的梯度幅值自适应Canny彩色图像边缘检测算法
改进的Canny算法是基于单色技术,首先将采集到的RGB图像转换成HSI图像。然后将HSI通道分离成三个通道,分别对三个通道进行Canny边缘检测算法,再将三个通道的边缘图像进行求和得到彩色图像(原图像)的边缘图像。彩色图像边缘检测算法流程如图1所示:
(1) RGB图像转换成HSI。
(2) 彩色图像HSI三个通道分离,形成H,S,I通道图像
(3) 三个通道图像分别进行边缘检测。
(4) 三个通道的边缘图像融合成。
(5) 边缘细化,最终形成原图像的边缘图像。

图1 彩色图像边缘检测算法流程图
6 实验结果及分析
本文以matalab2013a作为仿真实验平台,采用大小为308*319的旋冠盖图像(如图2)作为研究对象来验证本文的算法在实践中的可行性。

图2 原图 图3 灰度图像 图4 传统Canny
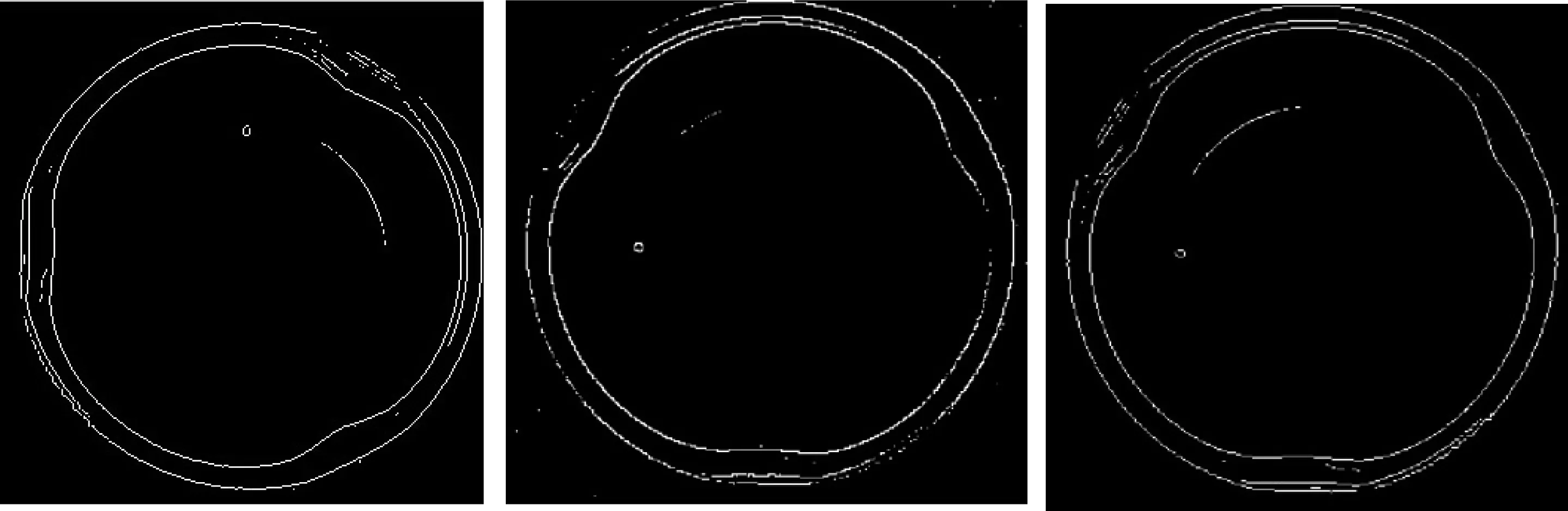
图5 Sobel 图6 Roberts 图7 (Prewitt)
原图像(图2)转成灰度图像(图3)然后分别用传统的Canny(TH=0.7,TL=0.28,σ=0.0001)、Sobel、Roberts、Prewitt算法得到的边缘结果(图4,图5,图6,图7)。比较图4、5、6、7可以看出Canny算子检测效果是最好的。
原图像(图2)通过分离得到HSI三个通道图像(8,9,10)如下所示:
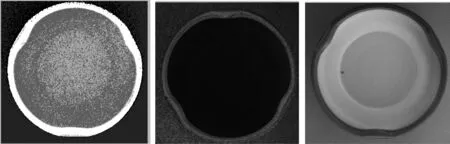
图8 H通道 图9 S通道 图10 I通道
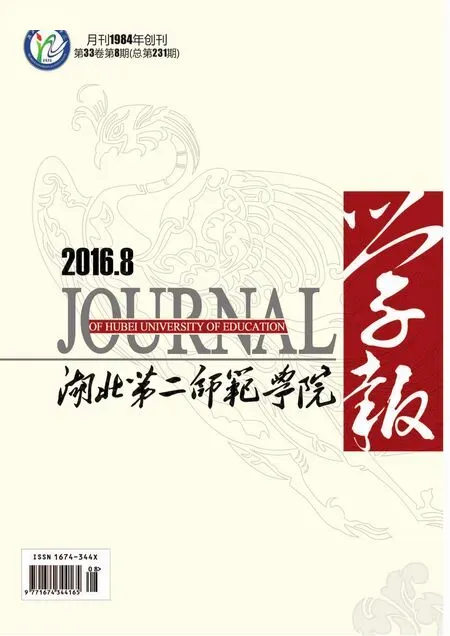
通过Otsu分别计算HSI三个通道中像素的梯度幅值并分别得到最佳阈值,在H通道中TH=0.9,TL=0.4TH=0.36;在S通道中TH=0.95,TL=0.4TH=0.38;在I通道中TH=0.5,TL=0.4TH=0.20。得到的边缘图像如图11,12,13所示:
图11 H通道边缘图像 图12 S通道边缘图像 图13 I通道边缘图像
将检测到的HSI三个通道的边缘图像进行融合得到三通道合成边缘图。
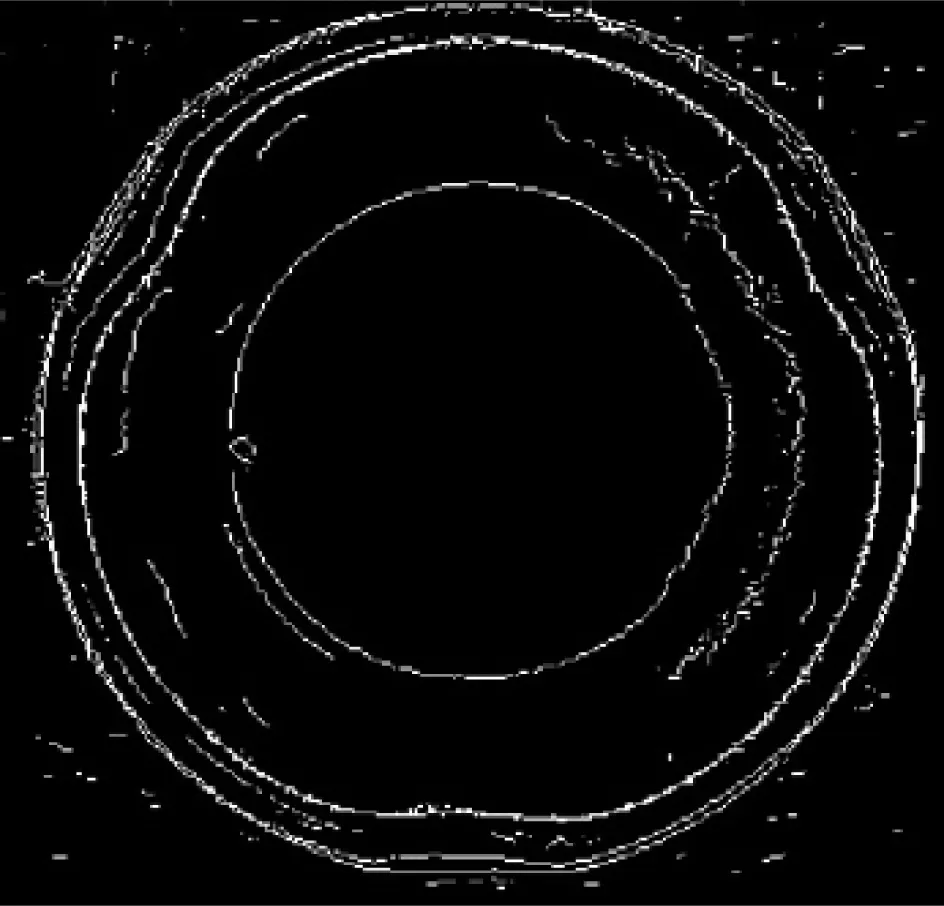
图14 三通道合成边缘图
Otsu自适应Canny灰度图像检测算法是通过Otsu计算灰度图像的灰度值得到图15。图15统计结果图中横坐标表示灰度值,纵坐标表示灰度值对应的像素点个数。由峰值坐标(140,981)算出最佳的阈值(TH=0.6274,TL=0.4,TH=0.2501),并通过Canny进行边缘检测得到边缘图像。对图3应用此算法得到如图16所示的边缘图像。
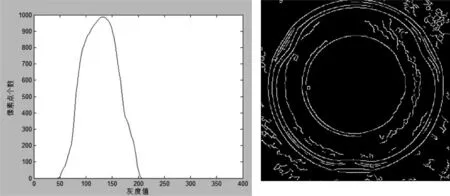
图15 Otsu灰度图 图16 灰度的Otsu自适应
直方图自适应Canny灰度图像检测算法是通过直方图对灰度图像的灰度值统计如图17,图中横坐标表示灰度值,纵坐标表示灰度值对应的像素点个数。由波峰坐标(85,786)和(160,1600)算出最佳阈值(TH=0.6275,TL=0.3333,σ=0.0001),并通过Canny进行边缘检测得到边缘图像。对图3应用此算法得到如图18所示的边缘图像。
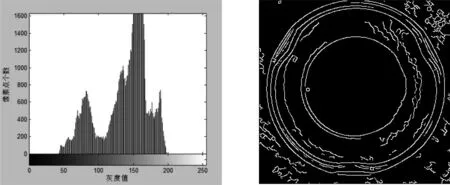
图17 灰度直方图 图18 直方图灰度自适应

图19灰度Otsu 图20 灰度直方图 图21 本文算法
对检测到的边缘图像对比分析,主观上从图14、16、18可以看出本文算法得到的边缘图像中的虚假边缘较少,在客观评价指标上由于没有标准的参考图像,本文选择信息熵、平均梯度值和边缘强度指标对边缘模版进行对比。
信息熵描述的是信源的不确定性,是信源中所有信息的平均信息量[12~13];平均梯度描述的是影像的清晰程度反映图像细节反差和纹理变化特征,平均梯度值越大,表明图像越清晰,融合效果更好[13];边缘强度指沿边缘法线方向图像局部的变化强度的量度[14]。
如19、20、21分别是灰度图像基于Otsu自适应灰度阈值、灰度图像基于直方图自适应灰度值阈值得到的边缘模版,HSI颜色空间基于Otsu自适应梯度幅值阈值得到的边缘模版。分别统计信息熵,平均梯度,边缘强度的结果见表1:
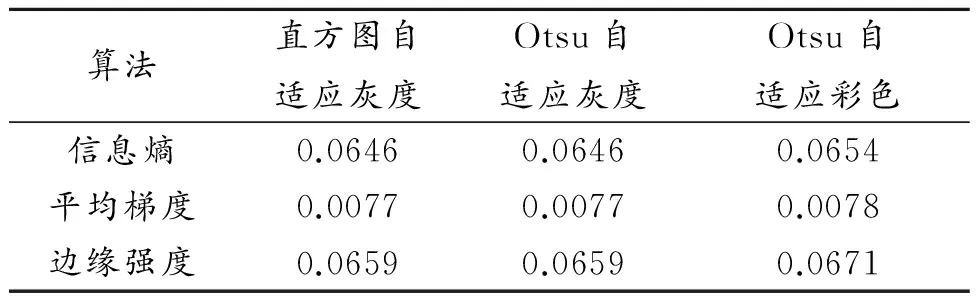
表1 图像质量评估指标
由表格1中的数据可以看出图21的各项指标都达到了好的效果,表明本文算法在保证自适应的同时,边缘检测的效果也好。
6 结束语
本文针对传统的Canny算法的不足,提出了基于Otsu自适应梯度幅值阈值的算法。实验结果表明,与传统的Canny的算法相比,该算法在保证自适应的同时,还提高了检测的精度和弱边缘的提取;与基于Otsu自适应灰度幅值阈值算法和基于直方图自适应灰度值阈值算法相比,减少了虚假边缘并保留了更多的边缘信息。是一种有效的边缘检测方法。
[1]L. G. Roberts. Machine perception of three-dimensional solids. In Optical and Electro-Optical Information Processing. Cambridge, MA:MIT press,1965
[2]I.Sobel. Camera models and machine perception, PhD theses. Stanford University, Stanford,CA,1970
[3]J. M. Prewitt. Object enhancement and extraction. New York: Academic Press,1970
[4]杜文亮,刘晓东,吕园园.基于 C-Canny算子与灰度空间的彩色图像边缘检测[J].微电子学与计算机,2010,(4):17-20.
[5]章毓晋.图像分割 [M].北京:科学出版社,2001:135-156.
[6]J. Canny. A computational approach to edge detetion. IEEE Transaction on Pattern Analysis and Machine Intelligence,1986,8(6):679-698
[7]闫丽丽,许长辉,高井祥,王坚.基于数学形态学细化算子的改进Canny算法研究[J].测绘科学,2010,35(2):82-84.
[8]R. C. Gonzalez, R. E. Woods著.数字图像处理(第二版). 阮秋琦, 阮宇智等译.北京:电子工业出版社,2003.
[9]GAO Li,LING Xiao-ming. Color Edge Detection Based on Mathematical Morphology in HSI Space[J]. Opto-Electronic Engineering, 2010, 37(4): 125~129
[10]李华强,喻擎苍,方玫.Canny算子中Otsu阈值分割法的运用[J].计算机工程与设计,2008:2297-2299
[11]张帆,彭中伟,蒙水金.基于自适应阈值的改进Canny边缘检测方法[J].计算机应用,2012,32(8):2296-2298.
[12]吴瑾,李娟,刘成云,等.基于最大熵的灰度阈值选取方法[J].武汉科技大学学报,2004,27(1):58-60.
[13]曾立庆,蒋年德. 基于邻域内相关系数与平均梯度的图像融合方法[J]. 计算机工程与设计, 2010,31(7):1533-1535.
[14]胡跃明,陈泽武,陈安, 高红霞.基于尺度空间边缘强度累计的边缘检测[J].华南理工大学学报,2014,42(9):59-06.
Adaptive Color Image Edge Detection Based on Canny Theory
SHU Jun1, CHENG Qi1, XU Cheng-hong1, LIU Wei1, GUO Ming-lei2
(1. School of Electrical and Electronic Engineering, Hubei University of Technology, Wuhan 430068, China; 2. Yellowstone Daily Media Group, Huangshi Hubei 435003, China)
Image information is the basis of image edge detection and image edge detection is the most important condition for image feature extraction. According to the problem that the transformation of color image into gray image will lead to information lost and the traditional Canny operator need to be set a level of threshold value manually, this paper proposes the Canny color image edge detection algorithm with best adaptive threshold value based on Otsu. The experimental results show that the algorithm ensures the self adaptation while at the same time achieved good results in preserving edge details.
adaptive method; Otsu; gradient magnitude threshold; morphology; canny operator; color image
2016-06-25
湖北省教育厅科学技术研究计划优秀中青年人才项目(Q20121409)
舒 军(1973-),男,湖北武汉人,副教授,硕士生导师,研究方向为机器视觉、智能控制与机器人。
程 启(1988-),男,湖北黄石人,硕士研究生,研究方向为智能控制与机器人。
TP391
A
1674-344X(2016)08-0050-05
猜你喜欢
数学物理学报(2021年6期)2021-12-21 06:24:38
数学物理学报(2021年2期)2021-06-09 08:54:26
应用数学(2020年2期)2020-06-24 06:02:50
应用数学(2020年2期)2020-06-24 06:02:44
电子制作(2019年16期)2019-09-27 09:34:46
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:54
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:52
自动化学报(2017年5期)2017-05-14 06:20:56
数学物理学报(2016年3期)2016-12-01 05:36:27
东北电力大学学报(2015年1期)2015-11-13 05:20:36