
偏振片在智能车摄像头道路识别中的应用
2016-11-14 06:45:16叶天明康志远王风丽
物理与工程 2016年4期
唐 猛 肖 鑫 叶天明 康志远 王风丽
(同济大学物理科学与工程学院,上海 200092)
偏振片在智能车摄像头道路识别中的应用
唐 猛 肖 鑫 叶天明 康志远 王风丽
(同济大学物理科学与工程学院,上海 200092)
本文研究了大范围环境光照强度对摄像头采集道路信息能力的影响,解决了摄像头智能车因光照过强而迷失方向的问题.摄像头前加入两块线偏振片,减弱了进入摄像头光强,同时通过调节两块线偏振片的偏振夹角,也调制了进入摄像头的光强.研究表明:摄像头在早晨和中午时段可有效采集道路信息的条件是两块偏振片的偏振化方向夹角分别为0~60°和40°~65°;傍晚时段,增加偏振片后,提高了道路识别比例参数.合理利用偏振片,可有效提高摄像头的工作范围,拓展了摄像头智能车的使用范围,在加深物理光学知识的同时,提高了学生的综合、创新实践能力.
智能车;摄像头;光强;偏振片;道路识别
近年来,在中学生、大学生中都有不同类型的智能车竞赛.智能车竞赛的规模和影响力越来越大,对提高学生的创新实践能力有着积极重要的作用[1].摄像头智能车的优点是摄像头采集的信息量大、前瞻性强.缺点是图像处理算法较复杂、运算量大,同时周围环境的光照强度对摄像头采集信息的影响大.虽然微机控制和图像处理算法的发展已解决了前面两个问题[2-4],但是一般摄像头在设计加工时就已经确定了其正常工作的光照强度范围,外界光强变化较大时,摄像头就失去了其性能.所以摄像头智能车对使用环境的光强有较大的依赖.光照太低,则采集到的图像亮度太低,称之为“黑屏”,在智能车上增加照明可以解决这个问题.光照太强,图像亮度太高,分辨不出道路的边界,称之为“白屏”,如果光照强度变化大,则不易解决.在摄像头前增加两块线偏振片,减弱了进入摄像头的光强.根据马吕斯定律[5-7],通过调节两块线偏振片的偏振夹角,可调制进入摄像头的光强,从而拓宽了智能车的有效工作范围.太阳光在一天的不同时段光强不同,而且对同一个位置的摄像头的照射角度也有所变化,所以摄像头的工作性能也会受到影响.本文研究了上海夏天同一天的早晨、中午和傍晚3个时段,智能车系统在有、无偏振片时采集道路信息的能力,为智能车的使用提供技术基础.
1 系统结构与问题
自行组装了一辆带摄像头的三轮车模型,以基于Windows系统的微型控制板作为智能车控制核心,使用数字摄像头采集道路信息,将摄像头安装在小车的前端,高度超过车顶约10cm处.摄像头采集一帧图片大小为480×640像素.用长90cm、宽60cm的木板作为道路,两侧使用红色电工胶带作为道路边界.用C语言编写程序,对摄像头采集的图像作二值化处理,识别出道路边界,据此控制小车的直线行驶、转弯等动作[8,9].图1为室内的实验设置实物图,包括智能车、偏振片、道路等.智能车在道路上行驶时,用摄像头实时采集前方道路的图像,控制核心进行图像处理后获得道路信息,控制智能车安全行驶在道路上.

图1 室内实验装置实物图
对于摄像头采集到的每一帧图片,取图片各像素点的RGB值中的R和G值,并定义该像素点的颜色值C为

选取一定的阈值T,若某像素点的C>T,该像素点对应道路边界,赋值为1;若C≤T,则该像素点不属于道路边界,赋值为0,从而对采集到的图像进行二值化处理,识别出道路边界,并用二值化图像表示,其中白色表示道路边界.图2为实验室内灯光照明下未加偏振片时摄像头采集的道路图像(a)和二值化处理结果图(b).由图可见,实验室内光照强度合适,摄像头能正确地采集道路图像,经图像处理后能够准确地识别出道路边界,从而为智能车的动作控制提供可靠的信号.
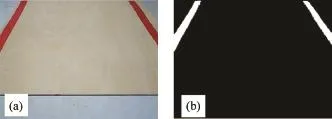
图2 (a)室内未加偏振片条件下摄像头采集的道路图像;(b)相应的二值化处理结果
然而,相同的道路在室外强烈太阳光(中午的阳光)照射下,摄像头采集的图像出现白屏,如图3(a)所示.在二值化处理过程中,不管怎样选取阈值T,所得图像几乎是全黑的,分辨不出道路的边界,如图3(b)所示.这表明,当环境光照比较强时,摄像头不能采集到正确的道路图像,因而无法通过图像处理识别道路边界,获得准确的道路信息.这是设计摄像头智能车时应当考虑的一个重要问题.

图3 (a)室外强光下未加偏振片时摄像头采集的道路图像;(b)相应的二值化处理结果
2 改进方法
为了消除摄像头采集图像时出现的白屏现象,一般的做法就是使用光学元件减弱进入摄像头的光强,如衰减片、线偏振片等.衰减片可以减弱光强,但在强度变化的条件下,只能通过增加或减少衰减片的个数,适用性弱.一块线偏振片可以把自然光的强度减半,但不能调制光强.使用两块线偏振片,根据马吕斯定律,可以通过调节两个偏振片偏振化方向的夹角,在减弱光强的同时,实现调制光强的大小.为了表征加入线偏振片对摄像头采集图像识别道路的影响,引入识别比例参数Rp,定义为

其中N0为在室内并且未加入光学元件时摄像头识别出对应于道路边界的像素点数,在我们的实验中N0取10212,N为加入光学元件后识别出道路边界的像素点数.Rp越接近于1,说明道路识别得越准确.假定室内不加光学元件时,摄像头识别道路的准确度最高.
3 结果与讨论
使用相同的实验装置,在室外早、中、晚三个时段分别进行了实验,实验结果如图4所示.图4(a)给出的是早中晚三个时段,利用识别比例参数Rp分析使用不同偏振片个数的实验结果,其中偏振片个数为2的Rp值是改变两块偏振片的偏振化方向夹角所能得到的最大Rp值.早晨和中午,阳光强烈,不使用或仅使用1块偏振片是无法识别道路信息的,使用2块偏振片,通过调节其偏振化方向的夹角,识别比例可以达到1,与室内一般照明时的效果相同;傍晚时分,太阳光相对较弱,使用偏振片后提高了道路识别比例参数.图4(b)给出的是不同时段下使用2块偏振片时,识别比例参数Rp随偏振化方向夹角θ变化的关系.早晨和傍晚时段的Rp-θ曲线的趋势比较接近,都是当θ小于某一临界值时,Rp都接近于1,大于临界值时,Rp快速减小至零.θ在早晨和傍晚临界值的取值分别为60°和50°,由此可见傍晚阳光相对较弱,摄像头有效工作时偏振夹角范围比早晨的小.而中午时段,由于光照强度很大,识别比例参数Rp仅在40°~65°范围内接近1.因此,需要根据环境光照条件的变化,适时调整偏振片的夹角,从而保证摄像头能够正常地采集信息.图4(c)和图4(d)给出了中午时段,无偏振片和使用2块偏振片且偏振夹角为60°时摄像头采集到的图像.所以光照过强时,增加偏振片,不仅减弱了进入摄像头的光,保证摄像头采集到有用的道路图像,而且通过调节2块偏振片的夹角对进入摄像头的光强进行了调制,使摄像头的有效工作范围得到拓展.
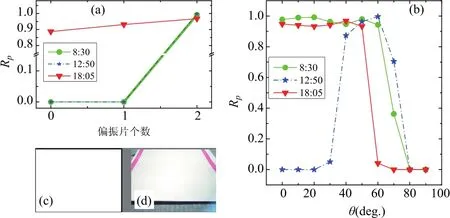
图4 不同时段实验结果,其中(a)为识别比例参数Rp与偏振片个数的关系,(b)为识别比例参数Rp与两块偏振片偏振化方向夹角θ的关系.(c)和(d)分别为中午时段未使用偏振片和使用2块偏振片且θ为60°时摄像头采集到的图像
4 结语
利用马吕斯定律,在摄像头前增加2块偏振片,通过调节2块偏振片的偏振夹角调节了进入摄像头的光强.研究了早、中、晚3个时段不同太阳光强照射下摄像头采集图像信息识别道路的情况,结果表明:在早晨和中午时段光强较强,没有偏振片或仅有1块偏振片下,摄像头不能正常工作,使用2块偏振片,偏振夹角分别为0~60°和40°~65°范围内摄像头可有效地采集道路信息;傍晚时分,使用偏振片后,提高了道路识别比例参数.由此解决了因光照过强产生的“白屏”问题,拓展了摄像头智能车的有效使用范围.
[1]杨海柱,刘洁,徐锦举.智能汽车竞赛对提高学生创新能力的研究[J].实验室研究与探索,2013,32(11):314-316.
[2]支高英,郭文成.智能车辆导航中道路图像的处理[J].微计算机信息,2009,25(5-3):297-299.
[3]胡庆华,谢林菲,刘学山.图像采集与处理在智能车系统中的应用[J].电子产品世界,2009,10(14):53-55.
[4]刘嘉豪,刘海刚,张建伟,等.智能车图像处理与识别算法研究[J].工业控制计算机,2014,27(8):19-22.
[5]王逸飞.线偏振光转向器的原理与设计[J].物理与工程,2004,14(3):59-60.
[6]徐劳力.从马吕斯定律到液晶显示原理[J].物理与工程,2010,20(5):41-42.
[7]欧英雷.光的偏振特性在机动车安全驾驶中的应用[J].物理与工程,2011,21(6):36-39.
[8]秦刚,杜超,吴丹怡.智能车转弯控制算法的仿真及分析[J].自动化技术与应用,2012,31(12):51-54.
[9]潘潇,刘勇,吴文池,等.光电智能车过弯控制算法的研究[J].电子技术,2015(1):14-16.
THE APPLICATION OF THE POLARIZERS IN THE CAMERABASED SMART CAR TO DISTINGUISH ROAD
Tang Meng Xiao Xin Ye Tianming Kang Zhiyuan Wang Fengli
(School of Physics Science and Engineering,Tongji University,Shanghai 200092)
The performance of the camera-based smart car is studied to collect path information outdoor at different time in summer.The intensity of sunlight is too strong for camera to acquire the effective path information in the morning and at noon.Two linear polarizers are equipped in front of the camera to reduce the intensity of light into the camera.According to Malus law,the light intensity can be modulated simultaneously by adjusting the angle of the two polarizers’polarization direction.The experimental results show that the camera can acquire correct path information with the angle in range of 0~60°in the morning and 40°~65°at noon;and the parameter of recognizing the path is improved using the polarizers in the evening.The camera can work well in the day using polarizers properly,and the application range of the camera-based smart car is expanded.
smart car;camera;intensity;polarizer;distinguish road
2015-12-07
同济大学教学改革研究与建设项目(《光电实验》课程建设).
唐猛,男,博士研究生,主要从事磁性材料、自旋电子学领域的研究.1tm@tongji.edu.cn
王风丽,wangfengli@tongji.edu.cn
唐猛,肖鑫,叶天明,等.偏振片在智能车摄像头道路识别中的应用[J].物理与工程,2016,26(4):69-71.
猜你喜欢
物理实验(2023年2期)2023-02-27 09:05:08
中学生数理化·七年级数学人教版(2020年12期)2021-01-18 06:57:42
语数外学习·高中版上旬(2020年8期)2020-09-10 07:22:44
知识就是力量(2020年4期)2020-05-20 15:08:31
电子制作(2019年12期)2019-07-16 08:45:20
火力与指挥控制(2019年4期)2019-06-14 09:26:10
测控技术(2018年6期)2018-11-25 09:50:24
西南石油大学学报(自然科学版)(2018年4期)2018-08-02 05:42:38
山西大同大学学报(自然科学版)(2016年2期)2016-12-12 03:19:15
广西电力(2016年5期)2016-07-10 09:16:44
