双三相电机感应电机矢量控制研究
2016-11-11 02:10张鹏举
水下无人系统学报 2016年5期
李 宏,张鹏举
(西北工业大学 航海学院, 陕西 西安, 710072)
双三相电机感应电机矢量控制研究
李宏,张鹏举
(西北工业大学 航海学院, 陕西 西安, 710072)
双三相感应电机以其高可靠性、稳定性在舰船推进、航空航天、新能源汽车以及核电领域得到广泛应用。目前许多学者研究主要集中在定子谐波控制和脉冲宽度调制(PWM)波优化方面。双三相感应电机在六相电压源逆变器驱动条件下共有64个电压空间矢量,把α-β子空间分为12个扇区,每个扇区内参考矢量由4个最大矢量合成。利用转子磁链定向控制方法和电压矢量空间解耦方法,在 MATLAB/Simulink环境下建立了六相空间矢量脉宽调制(SVPWM)调速系统,仿真结果表明, 系统转矩脉动和定子电流谐波较小,速度响应和磁链响应能够有效的跟踪给定, 具有良好的动态和静态响应能力。
双三相感应电机; 转子磁场定向控制; 电压矢量空间解耦
0 引言
双三相感应电机调速系统能够在低压供电条件下实现大功率驱动, 容错性和可靠性高, 当电机一相或多相出现故障时, 通过合理的控制算法能够实现系统不停车运行。此外, 还具有转矩脉动小、系统动静态性能稳定, 转子谐波损耗减小等优势[1-2], 在电动汽车、船舰推进、航空航天等领域具有广泛的应用前景。但由于双三相感应电机是一种典型的非线性、多变量、强耦合系统, 控制策略较为复杂。
在三相空间矢量脉宽调制(space vector pulse width modulation, SVPWM)技术中, 将电压矢量空间分为6个扇区, 参考矢量用相邻的2个电压空间矢量和零矢量来合成。K.Gopakumar[3]等将此方法推广应用到六相SVPWM技术中, 将αβ- 子空间上的电压矢量分成 12个扇区, 在每个扇区中参考矢量合成选取扇区中相邻幅值最大的基本电压矢量和零矢量。
双三相感应电机采用电压源型逆变器供电,因为定子绕组阻抗较小, 定子电流谐波较大。SVPWM技术能够有效抑制定子电流谐波问题。目前双三相感应电机研究主要集中在高校和研究所[4-6], 控制方式多采用直接转控制方式, 研究方向为控制电机谐波, 提高直流母线电压利用率。文中采用一种基于 4矢量的双三相感应电机SVPWM算法, 保证较高的直流母线电压利用率,同时抑制谐波电流, 整个系统采用按转子磁链定向矢量控制, 采用PI调节器, 减小纹波电流。
1 双三相感应电机数学模型
双三相感应电机其定子绕组由2套完全相同的三相绕组在空间位置上相互错开构成, 其转子采用标准鼠笼型结构, 双三相感应电机定转子的物理结构模型如图1所示。
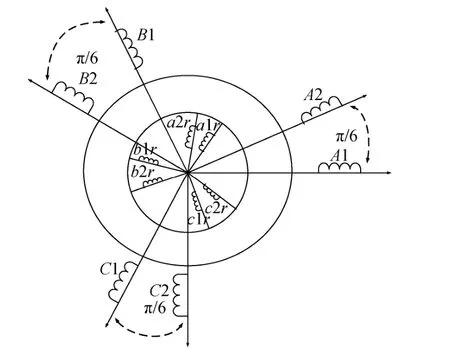
图1 双三相感应电机感应电绕组结构模型Fig. 1 Structure model of dual three-phase induction motor
其中定子绕组 A1-B1-C1, A2-B2-C2, 鼠笼转子可以等效为a1-b1-c1, a2-b2-c2两套绕组。

式中: Ls为定子自感;Lms为励磁电感;Lls定子绕组漏感。同样转子自感Lr可定义为

式中,Llr为转子绕组漏感。
双三相感应电机是一个6D系统, 要在6D坐标中对双三相感应电机进行分析控制比较困难。为了简化电机控制, 需要对其进行坐标变换。文中使用 Y.Zhao[7-8]等人提出的空间向量解藕理论,其矩阵变换式为
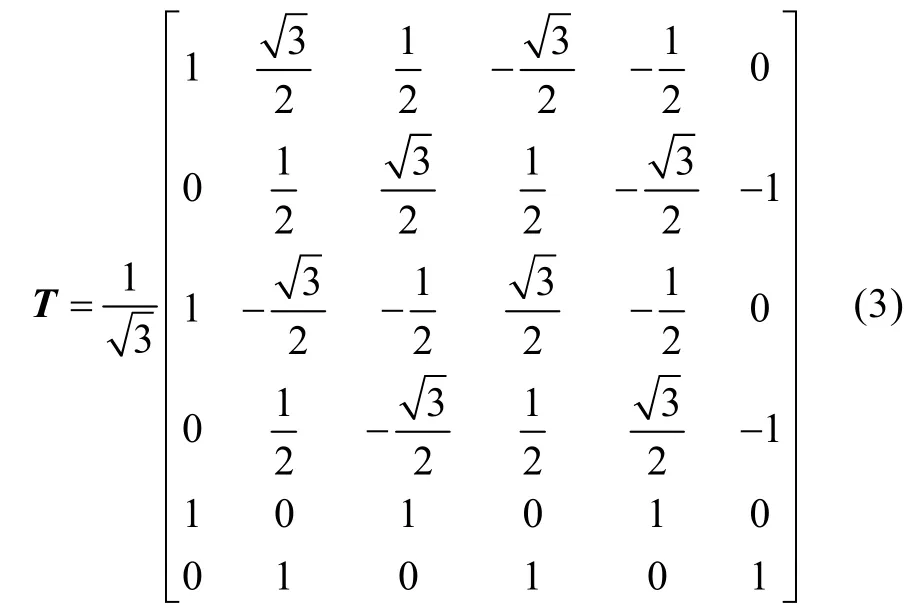
通过变换, 原始的 6D向量空间中的电压电流向量被映射到 3个 2D正交子空间中, 分别为αβ-平面、零序平面12oo-和与机电能量转换无关的12zz-平面[9-10]
在α β-子空间, 定子电压方程
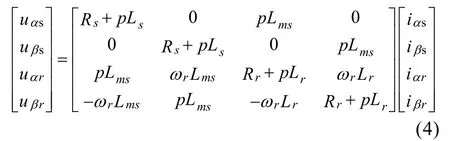
式中:uαs,uβs为α-β坐标系下定子电压;iαs,iβs为定子电流;ψαs,ψβs为定子磁链;ψαr,ψβr为转子磁链, 其值为 0;Rs为定子电阻;Rr为转子电阻;ωr为转子角速度;p为微分算子。
z1- z2子空间电压方程

o1-o2 子空间定义为零序空间, 不考虑对电机的影响。
2 六相SVPWM调制技术
2.1大矢量调制算法
六相电压源型逆变器如图2所示,共有64种基本开关状态,对应 64个矢量。利用式(4)变换,将其变换到α-β,z1-z1,o1-o23个子空间中。空间矢量分布如图3和图4所示。
由图3和图4可知,α-β子空间中12个最大矢量, 分别为48, 56, 60, 28, 12, 14, 15, 7, 3, 35,51, 49。12个最大矢量z1-z1子空间
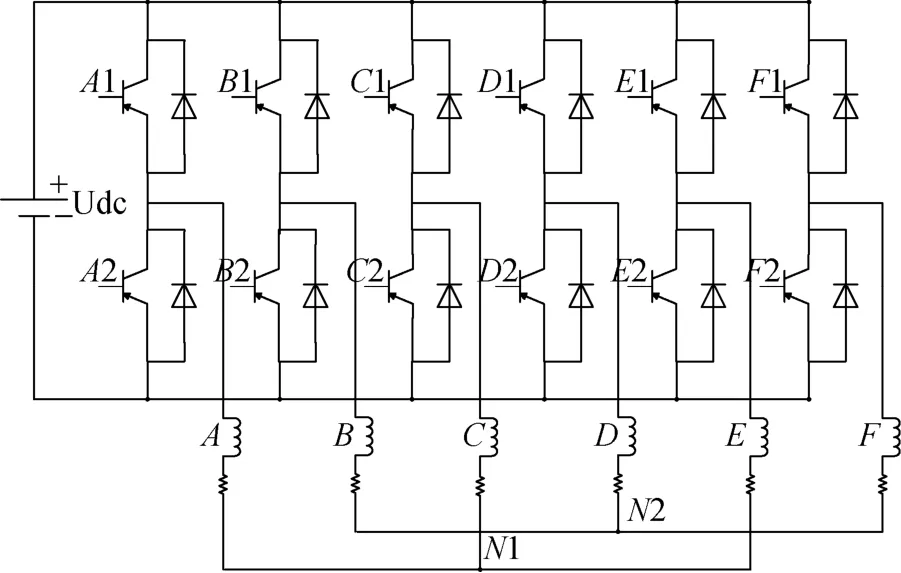
图2 六相电压源逆变器Fig. 2 Six-phase voltage source inverter

图3 -αβ子空间矢量Fig. 3 -αβ subspace vector

图4 z1-z1子空间矢量Fig. 4 z1-z1subspace vector
中对应最小矢量, 因此电机运行时在z1-z1子空间会产生谐波电流。算法中采用最大幅值矢量可以提高电压利用率, 同时能够抑制 z1-z1子空间的谐波电流[11-14]。
在子空间选取3个最大矢量, 利用伏秒平衡原则使3个矢量合成矢量为0。
以选取51, 49, 48矢量为例, 则根据伏秒平衡

求解得到
在α-β子空间合成参考矢量

式中:Udc为电压源电压,合成矢量方向和矢量49方向一致。
根据这种方法可以得到 12个中间矢量, 用 V1~V12表示 并且把空间分成12个扇区,见图5。
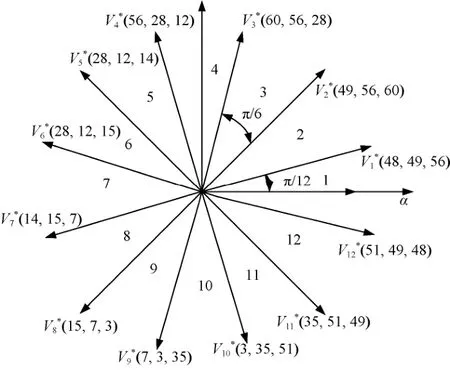
图5 中间矢量Fig. 5 Middle vector
以第 1扇区为例, 选择中间电压矢量V1,V12和零矢量合成最终参考电压,设 2个矢量和零矢量作用时间分别为和Ts1,Ts12和Ts0,开关周期为Ts,根据伏秒平衡原则列出方程

得到方程组的解
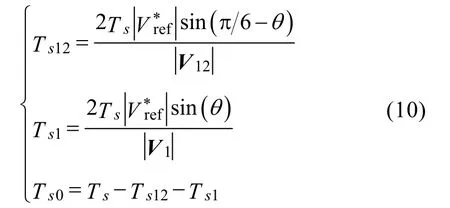
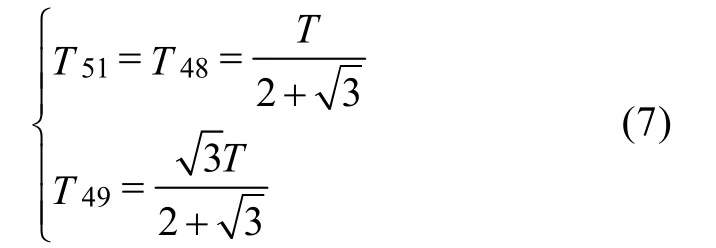
式中:θ为下矢量V12和参考矢量的夹角,其中。V1,V12分别由51,49,48和49,48,56合成,则最终的作用矢量为51,49,48,56合成得到。
联立式(6)、(7)、(10)得到4个非零矢量和零矢量的作用时间分别为
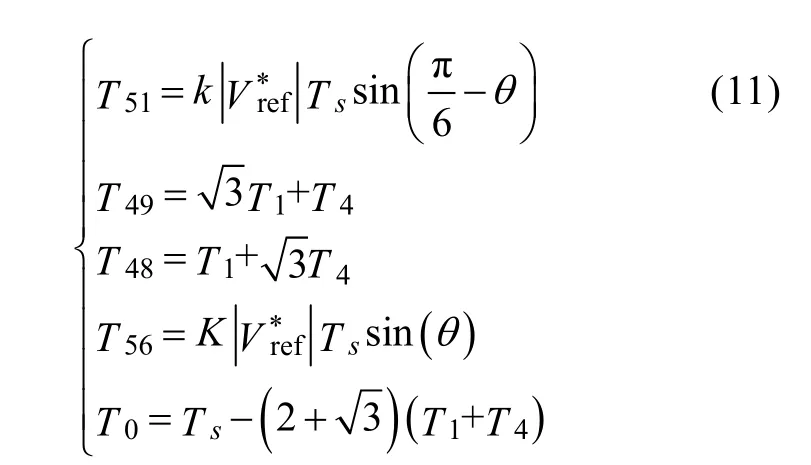
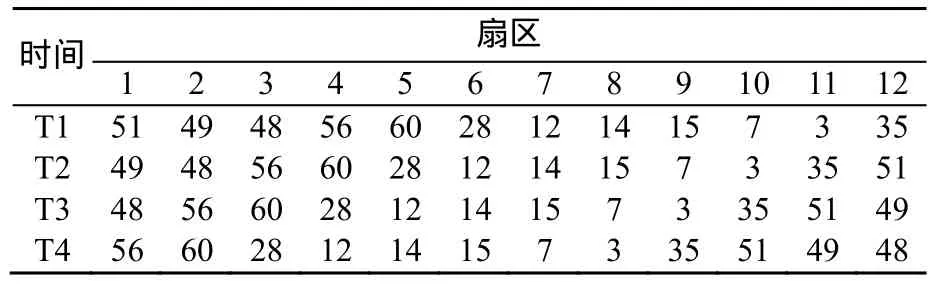
表1 大矢量作用时间和扇区Table 1 Time and sector of large vector
2.2大矢量和中矢量的调制算法
由图3和图4可知,α-β子空间矢量和z1-z1子空间矢量存在的关系,以第 1扇区为例,矢量49, 50, 48, 57在z1-z1子空间中的方向相反,当49,50两个矢量的作用时间和幅值成反比时在z1-z1子空间合成的矢量为0。
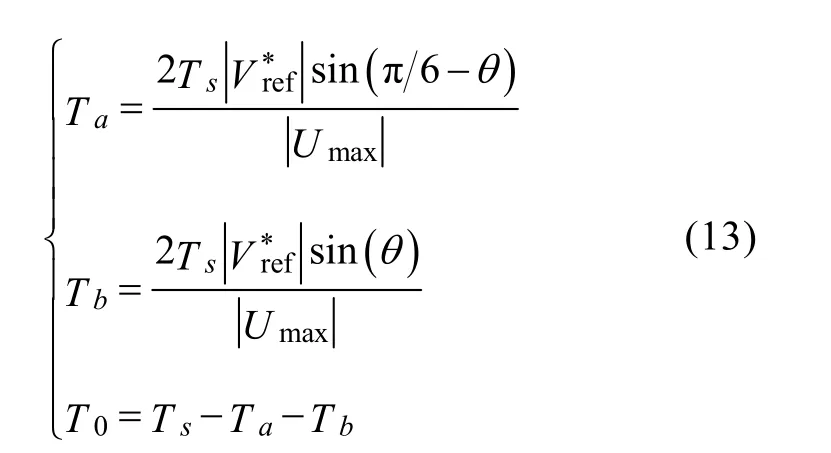
在第1扇区中

求解
根据两矢量在 z1-z1子空间的位置和幅值关系可知, 在子空间合成矢量为零。
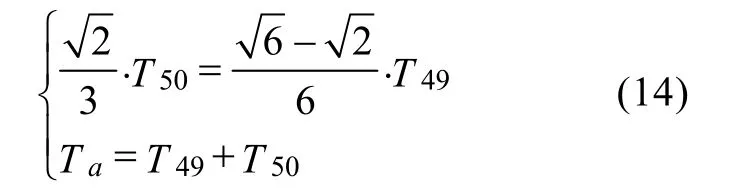
求解得
每个扇区作用矢量和作用时间如表2所示。

表2 大矢量、中矢量作用时间和扇区Table 2 Time and sector of large vector and middle vector
3 双三相感应电机矢量控制系统仿真
根据式(1)~式(15), 按照转子磁链定向控制思想在MATLAB中建立双Y电机仿真模型并搭建控制系统, 如图6所示。
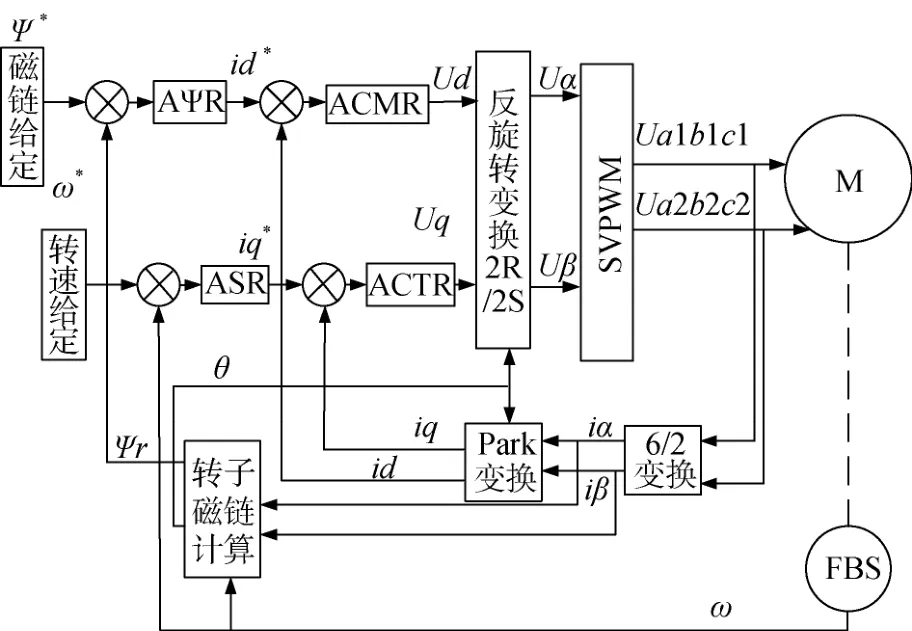
图6 双三相感应电机控制系统Fig. 6 Control system of dual three-phase induction motor
转速反馈系统中, 转速调节器(automatic speed regulator,ASR), 采用PI调节, 输出q轴电流

式中:iq为电流转矩分量;ω∗为给定转速;ω为反馈转速;Kp为比例系数;Ki为积分系数。磁链反馈系统中, 磁链调节器(automatic flux regulator,AΨR), PI输出

式中: id为电流励磁分量;ψ∗为给定磁链幅值;ψ为反馈磁链幅值。ACMR(automatic current magnetization regulator)和 ACTR(automatic current torque regulator)分别为励磁电流调节器和转矩电流调节器。
双三相感应电机的相关参数: 励磁电感0.434 H, 定子相电感 0.444 H, 归算到定子侧的转子相电感0.446 H, 定子相电阻2.02 Ω, 归算到定子侧的转子相电阻 4.12 Ω, 极对数np=2, 闭环系统中转速给定1 000 r/min, 转子磁链给定0.5 Wb, 在 MATLAB中对建立的动态系统进行仿真。根据上述参数, 对基于 12个大矢量的六相SVPWM系统进行仿真试验, 空载启动, 1 s时负载突变15 N·m。2种调制方法下转矩、转速、磁链、谐波电流、A1相电流的FFT分析的曲线如下, 其中图7、9、11、13表示大矢量调剂技术中电机的响应曲线, 图 8、10、12、14表示大矢量和中矢量调制方法下电机的响应曲线。对比2种方法下电机的响应曲线, 仿真结果表明, 和4个大矢量调制算法相比, 2个大矢量和2个中矢量调制技术下转矩脉动小, 磁链和转速能够更好的跟踪给定值, 同时转速跳变小, 谐波电流峰值较小。

图7 方法1和方法2转矩响应曲线Fig. 7 Torque response curve of method 2
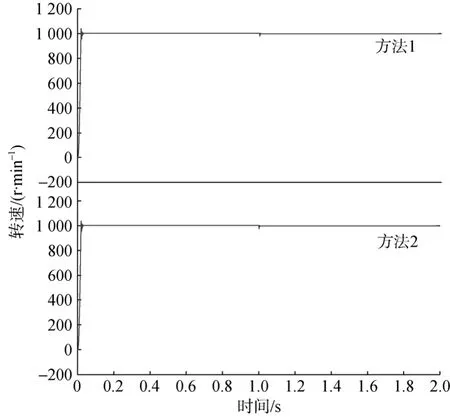
图8 方法1和方法2转速响应曲线Fig. 8 Speed response curve of method 2
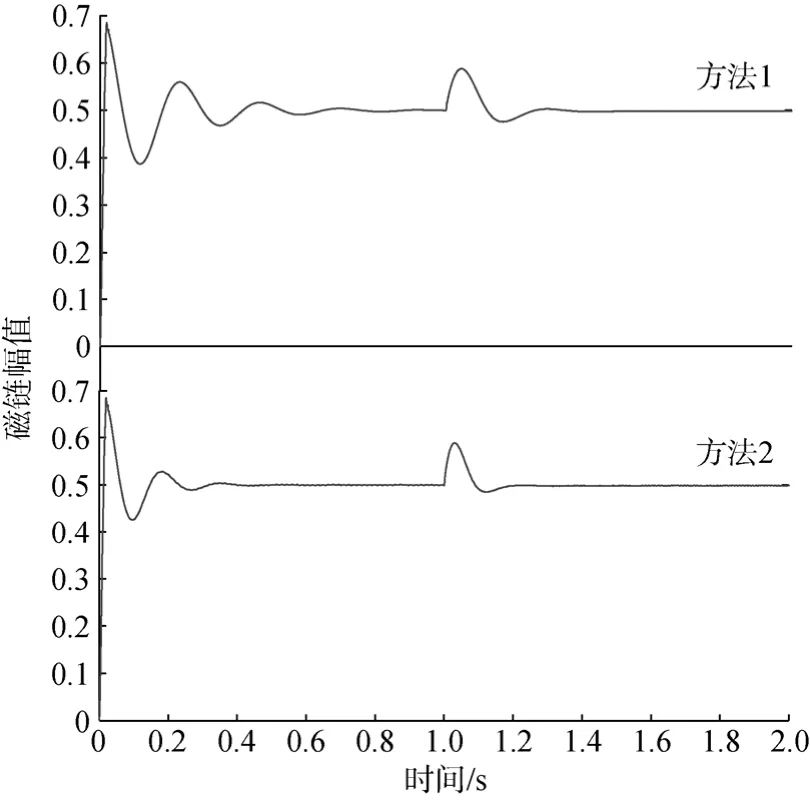
图9 方法1和方法2磁链相应曲线Fig. 9 Rotor flux response curve of method 2
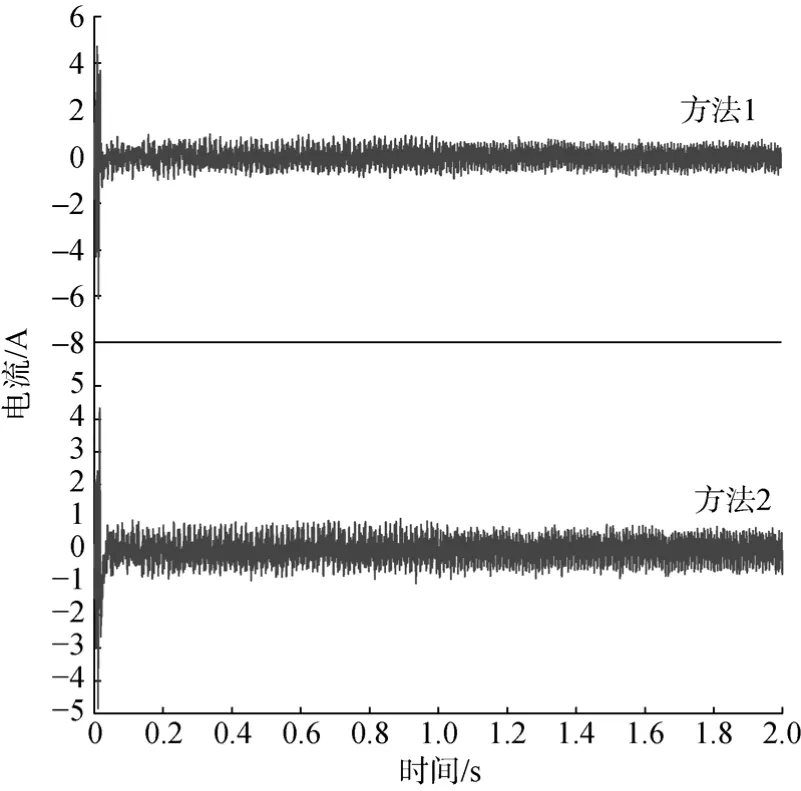
图10 方法1和方法2谐波电流Fig. 10 Harmonic current of method 2
4 结束语
双三相感应电机在低压大功率场合具有广泛的应用前景, 同时具有很好的容错性能, 可靠性较高。文中采用空间矢量解耦方法, 在两相坐标系αβ-中建立数学模型, 采用2个大矢量以及2个大矢量和 2个中矢量的调制方法, 利用转子磁链定向控制技术, 通过磁链、转速以及电流闭环控制进行动态仿真。文中通过2种不同调制方法解决电机运行时谐波影响, 利用2种不同的矢量设计调制算法控制电机, 在 MATLAB中进行仿真, 取得良好的控制性能。文中未进行实物样机的构建以及相关实验, 仅从理论和仿真上说明双三相感应电机的矢量控制算法, 后期应在实物样机上检验控制性能并进行算法优化, 达到可实用化的目的。
[1] Levi E. Multiphase Electric Machines for Variable Speed Applications[J]. IEEE Transactions on Industrial Electronics, 2008, 55(5): 1893-1909.
[2] Jhons T M. Improved Reliability in Solid-state AC Drives by Means of Multiple Independent Phase-drive Units[J]. IEEE Trans. on Industry Applications, 1980, 16(3): 321-331.
[3] Singh G K. Multi-phase Induction Machine Drive Reseach-A Survery[J]. Electric Power Stystems Research, 2002, 61(2): 139-147.
[4] 张朝远. 双三相感应电机无速度传感器矢量控制系统研究[D]. 成都: 西南交通大学, 2013.
[5] 薛山. 多相永磁同步电机驱动技术[D]. 北京: 中国科学院, 2005.
[6] 罗世军. 双三相永磁同步电机驱动控制技术研究[D].哈尔滨: 哈尔滨工业大学, 2014.
[7] 陈伯时, 阮毅. 电力拖动自动控制系统——运动控制系统[D]. 上海: 上海大学, 2003.
[8] 刘东, 黄进, 杨家强. 多相感应电机转子磁场定向矢量控制策略[J]. 浙江大学学报(工学版), 2012, 46(8): 1498-1505. Liu Dong, Huang Jin, Yang Jia-qiang. Multi-phase Induction Motor in Rotor Field Oriented Vector Control Strate gy[J]. Journal of Zhejiang University(Engineering and Technology Edition), 2012, 46(8): 1498-1505.
[9] 张岳, 沈建新. 双三相感应电机感应电动机矢量控制调速系统建模与仿真[J]. 微特电机(驱动技术), 2014,42(7): 61-63. Zhang Yue, Shen Jian-xin. Dual Three-phase Induction Motor, Induction Motor Vector Control Speed Control System Modeling and Simulation[J]. Micro Motor(Driver Technology), 2014, 42(7): 61-63.
[10] White D C, Woodson H H. Electromachanical Energy Conversion[M]. New York: Wildy, 1959.
[11] Zhao Y, Lipo T. Space Vector PWM Control of Dual Three Phase Induction Machine Using Vector Space Decomposition[J]. IEEE Transactions Oil Industry Application,1995, 31(5): 1100-1109.
[12] Nelson R H, Krause P C. Induction Machine Analysis for Arbitrary Displacement between Multiple Winding Sets[J]. IEEE Transactions on Power Apparatus and Systems, 1974, 93(3): 841-848.
[13] Li Shan, Xiao Hui-hui. Research of SVPWM Control Technique of Double Three-phase Induction Motor[C]// Electrical Machines and System 2005(ICEMS 2005),2005: 109-114.
[14] 杨金波, 杨贵杰, 李铁才. 双三相感应电机永磁同步电机的建模与矢量控制[J]. 电机与控制学报, 2010, 14(6): 1-7. Yang Jin-bo, Yang Gui-jie, Li Tie-cai. Modeling and Vector Control of Permanent Magnet Synchronous Motor for Dual Phase Induction Motor[J]. Journal of Motor and Control, 2010, 14(6): 1-7.
(责任编辑: 许妍)
Vector Control of Dual Three-phase Induction Motor
LI Hong,ZHANG Peng-ju
(School of Marine Science and Technology, Northwestern Polytechnical University, Xi′an 710072, China)
Dual three-phase induction motor has been widely applied to such fields as ship propulsion, aviation, aerospace, new energy vehicles, and nuclear power because of its high reliability and stability. There are 64 voltage space vectors in six-phase induction motor driven by the six-phase voltage source inverter. The α-β subspace is divided into 12 sectors, and the reference vector in each sector is composed of 4 maximum vectors. Based on the rotor flux oriented control method and voltage vector space decoupling method, a six-phase space vector pulse width modulation(SVPWM)speed control system is established in the MATLAB/Simulink environment. Simulation results show that the system′s torque ripple and stator current harmonics are small, the speed response and flux response can effectively track, and the system possesses satisfactory dynamic and static response capability.
dual three-phase induction motor; rotor field orientation control; voltage space vector decoupling
TJ630.34; TM346; TP273
A
1673-1948(2016)05-0351-06
10.11993/j.issn.1673-1948.2016.05.007
2016-07-22;
2016-08-08.
李宏(1962-), 男, 博士, 副教授, 主要研究方向为电力电子与电气传动.
猜你喜欢
微电机(2022年8期)2022-10-12
防爆电机(2022年3期)2022-06-17
南北桥(2022年2期)2022-05-31
传感器与微系统(2022年3期)2022-03-23
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
微电机(2020年7期)2020-08-01
微特电机(2019年7期)2019-08-02
中国民航大学学报(2019年1期)2019-04-13
电子制作(2019年23期)2019-02-23