
基于空间矢量脉宽调制的永磁同步电机死区效应分析与补偿*
2016-11-09 10:58范彩云何青连
电机与控制应用 2016年9期
刘 堃, 范彩云, 韩 坤, 甄 帅, 何青连
(许继集团有限公司 许继电气股份公司,河南 许昌 461000)
基于空间矢量脉宽调制的永磁同步电机死区效应分析与补偿*
刘堃,范彩云,韩坤,甄帅,何青连
(许继集团有限公司 许继电气股份公司,河南 许昌461000)
逆变器死区时间使逆变器输出谐波分量增加,电压和电流发生畸变,甚至导致电机在低速下的不稳定运行。为解决上述问题,提出一种基于扰动电压检测的死区效应补偿策略。通过判断输出电压矢量角度获取三相电流方向,从而确定补偿电压矢量。同时,为提高输出波形质量,结合一种零电流钳位效应消除方法,可以同时补偿死区引起的误差电压和消除零点电流钳位现象。仿真和试验结果表明该方法能明显改善电流波形畸变,具有很好的实用价值。
死区效应; 补偿电压矢量; 误差电压; 零点电流钳位; 空间矢量脉宽调制; 永磁同步电机
0 引 言
空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)技术由于直流电压利用率高、谐波少等特点,被广泛应用于永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)的调速控制[1-3]。然而,实际的功率器件存在开关延时,所以并非是理想的开关器件。在电机驱动中,为防止桥臂直通,通常会设置死区时间,但死区时间的存在带来了低次谐波,造成输出电压的基波电压损失,使输出电压发生严重的波形畸变,导致调速系统的动静态性能下降,且低频振荡严重[4]。
为了补偿死区效应,需要对死区时间引起的误差电压进行补偿。目前常用方法有电压反馈型和电流反馈型两种[5-6]。补偿原理是设法产生一个与畸变电压大小等同、方向相反的补偿电压以消弱或抵消畸变电压的影响。
电压反馈型将各相的输出电压经检测电路检测出来,将上一次电压差的一个比例值作为补偿电压加在此次电压给定值上作为最终的补偿值。该方法可以补偿死区造成的不良影响,但需要增加检测每相电压值的硬件电路,结构复杂[7]。
电流反馈型利用三相电流的方向确定相应的补偿函数,其不需要增加硬件电路,在原有电机驱动器的基础上用软件即可实现。但在实际中,由于死区时间会带来零点电流钳位现象,电流的过零点存在一定的模糊性,难以直接准确测定,从而影响了补偿效果[8]。
除上述方法外,也有大量文献提出了不同的死区补偿方案。文献[9-10]利用电流方向检测和伏秒平衡的方法对死区进行了补偿。文献[11]通过检测d-q轴电流误差,将电流闭环与死区补偿相结合。该方法不需要增加额外的硬件电路,但是补偿效果受电流控制器的影响。文献[12]针对H桥静止无功发生器中死区带来的误差电压和零点电流钳位,提出延长或缩短开关器件的占空比时间来补偿死区效应。该方法可以保证输出完全跟踪输入,但占空比时间需要精确计算。文献[13-14]采用模糊补偿算法实时计算由死区导致的误差电压,将前馈控制应用于误差电压补偿中。文献[15-16]提出一种扰动观测器的补偿方法,把死区效应引起的误差电压作为系统扰动,采用扰动观测器估算补偿信号,但是需要通过大量试验来得到合适的控制参数。
本文提出一种基于扰动电压检测的死区补偿策略。首先,为提高电流极性检测的准确性,由输出电压矢量角度判断三相电流方向以确定补偿电压矢量;同时,为改善输出波形质量,将一种零电流钳位效应消除方法结合到上述补偿方法中。该方法可以补偿由死区引起的误差电压,同时又可以消除零点电流钳位现象。
1 死区效应分析
SVPWM技术是从电机的角度出发,使电机获得幅值不变的圆形磁场(即正弦磁通)。电机驱动器通过三相桥臂的不同开关模式产生磁通来逼近基准磁通圆,而死区时间会产生空间矢量误差,使得形成的磁场偏离圆形磁场,降低电机性能。三相PMSM驱动器中通常采用三相全桥电路拓扑,定义相电流流向电机侧为正方向,如图1所示。
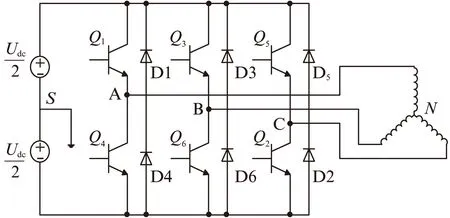
图1 电压型逆变器主电路结构
为了定量分析死区时间给驱动器带来的影响,以A相桥臂为例对死区时间引起的电压空间矢量误差进行定量分析。图2是A相桥臂驱动信号和输出电压波形,其中:ua为逆变器的输出电压;t1*为理想情况下,即无死区加入时开关管的导通时间;td为加入上下桥臂占空比切换时的死区时间;ton和toff分别为开关器件的导通延时和关断延时时间;ts为一个开关周期。图2中: (a)、(b)为理想情况下,A相桥臂上、下管驱动信号;(c)、(d)为加入死区时间后,A相桥臂的驱动信号;(e)为实际输出A相电压波形,阴影部分为死区时间引起的误差电压,该阴影部分的误差电压极性取决于电机相电流的方向。
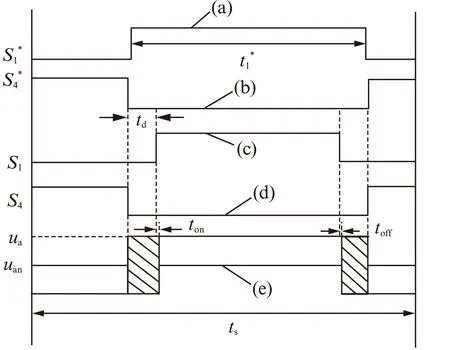
图2 死区效应示意图
以A相电流为例,当ia>0时,由死区时间带来的时间误差te=toff-td-ton。同理,可得当ia<0时,时间误差te=-(toff-td-ton)。由参考电压与补偿电压伏秒平衡原则,可将A相电压的误差表示为
当ia>0时,
(1)
当ia<0时,
(2)
由式(1)、式(2)可得
uan=Udeadsgn(ia)
(3)
其中:
(4)
(5)
实际上,开关器件存在导通压降。所以式(4)可表示为
(6)
式中:Uan——A相扰动电压;
Udc——逆变器直流侧电压;
Us、Ud——开关器件的导通压降和二极管导通压降;
ia——A相电流。
同理,B、C相的误差电压为
ubn=Udeadsgn(ib)
(7)
ucn=Udeadsgn(ic)
(8)
从式(3)、式(7)、式(8)可知,由死区时间引起的电压畸变和电流的极性相关,与电流的大小无关。图3表示了这种关系。

图3 电流极性与端电压畸变的对应关系
图3中,电压畸变的变化方向与电流方向相反。相电流由负变为正,端电压减小;相电流由正变为负时,端电压增大。这种相反的变化使得电流钳位在零点,故称为零电流钳位现象。零电流钳位现象会导致输出电压的进一步畸变。
与其相反,如果电流的变化方向与电压变化方向相同: 相电流由负变正时,端电压增大;相电流由正变负时,端电压减小。这样的情况使得相电流在过零点处有快速上升的趋势。
2 死区效应补偿策略
2.1补偿电压矢量的确定
通过以上分析,可以看出死区补偿的前提是准确检测三相电流的方向。输出电压矢量角度与三相电流方向的关系如图4所示。图4中,符号从中心向外依次是A、B、C相,符号+表示电流流向负载,符号-表示电流由负载流向逆变器。
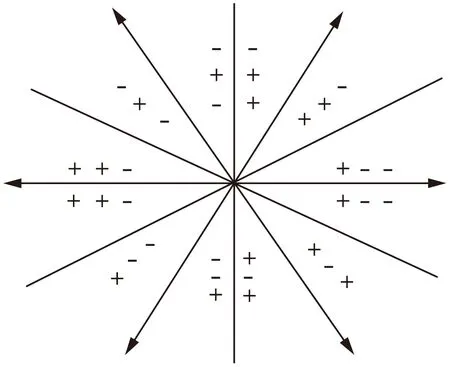
图4 电压矢量图中三相电流方向
在PMSM矢量控制中,由于采用id=0的矢量控制策略,转子磁通始终保持与旋转坐标系(d-q坐标系)d轴方向一致,而定子电流方向保持与q轴方向一致。设d轴与固定坐标系α轴之间的电角度为θe,当θe在[-60°,0°]区间时,与图4中[30°,90°]区间相对应。因此,可以得出电角度与电流极性及补偿电压关系如表1所示(电角度可以由编码器反馈得到)。

表1 电流矢量与补偿电压关系
2.2零点钳位现象消除
将abc三相坐标系下的补偿电压变换到两相旋转坐标系下可得
(9)
其中:
(10)
式(3)、式(7)、式(8)中的相电流在d-q旋转坐标系下表示为
(11)
由式(9)~式(11)可以得到旋转坐标系下的扰动电压为
(12)
在矢量控制中,采用id=0的控制策略。因此,可将旋转坐标系下的补偿电压简化为
(13)
在旋转坐标系下,d轴的补偿电压是频率为相电流频率6倍的锯齿波。其幅值为
(14)

零电流钳位效应消除策略如下:
(3) 根据三相电流中最小的相此刻正处于过零点,改变该相电流极性。
图5为死区补偿算法流程图。

图5 补偿算法流程图
3 仿真与试验
PMSM参数如下: 额定功率1.5kW,额定转速3000r/min,额定电流6A,极对数4,相绕组电阻0.567Ω,相绕组电感2.3167mH,电气时间常数4.058ms,机械时间常数2.24ms。开关器件IGBT的延时时间ton=1.0μs,toff=1.2μs,开关频率为10kHz,开关管的导通压降为1.8V,二极管的导通压降为2.5V,设定死区时间为5μs。采用2500线的增量式编码器确定转子的位置。死区补偿方案的控制框图如图6所示。
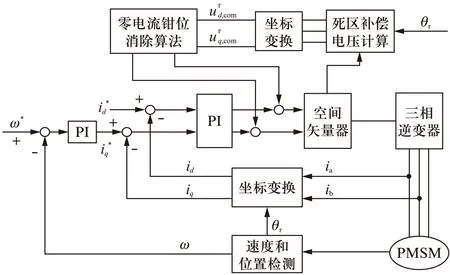
图6 死区补偿控制框图
3.1仿真验证
基于以上分析研究,利用MATLAB 2013Ra对矢量控制的PMSM系统进行仿真,给定转速为60r/min,负载转矩为3N·m。图7、图8分别为死区时间为2μs时,未采用死区补偿算法和采用死区补偿算法时的电流仿真波形。由图7、图8仿真结果可知,未采用死区补偿算法时,相电流发生严重畸变,电流在死区时间内出现平顶,零电流钳位现象明显,并且d轴电流存在明显波动,稳态情况下,相电流波形谐波含量较高,THD为7.50%。将本文提出的死区补偿方法应用于该矢量控制系统,由死区时间造成的误差电压得到了有效补偿,并且逆变器的零电流钳位现象得以消除,d轴电流波动减小,稳态情况下电流质量较好,谐波含量较低,THD为2.67%。

图7 无补偿情况电流仿真结果
3.2试验验证
为进一步验证本文提出的死区补偿策略的实用性和有效性,搭建基于TMS320F2812的测试平台,如图9所示。平台包括负载模拟器、联
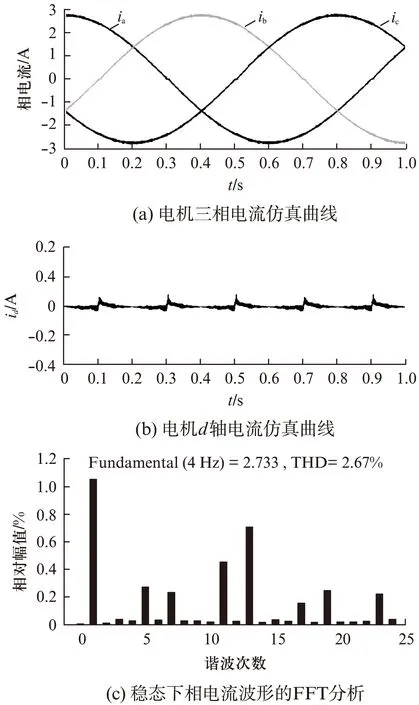
图8 补偿后电流仿真结果
轴节、转矩传感器、加载电机、加载驱动器、负载控制和驱动器、控制器和计算机。死区补偿算法如图5所示。试验条件: 转速为60r/min,负载转矩为3N·m。

图9 试验测试平台
图10、图11是补偿前后A相电流试验波形。由图10、图11可见,采用本文提出的死区补偿策略进行补偿后,A相电流波形质量得到明显改善,正弦度较好。
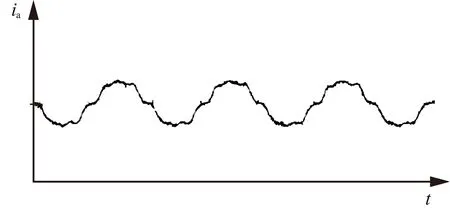
图10 补偿前试验波形
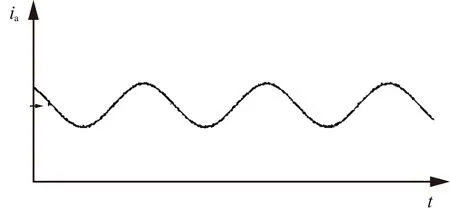
图11 补偿后试验波形
4 结 语
本文对逆变器的死区效应进行了分析,针对众多补偿方法中的不足,提出了一种基于扰动电压检测的死区效应补偿策略。为提高电流极性检测的准确性,由输出电压矢量角度来获取三相电流方向;同时,为提高输出波形质量,采用一种零电流钳位效应消除方法,可以同时补偿死区误差电压并消除零电流钳位现象。仿真和试验结果表明该方法可以明显改善电流波形畸变,具有较好的实用性。
[1]肖海峰,刘海龙,贺昱矅,等.基于电压空间矢量控制PMSM系统新型死区补偿方法[J].电工技术学报,2013,28(8): 114-119.
[2]杨澜倩,唐校,万颖,等.SVPWM过调制算法磁链分析及在永磁同步电机驱动中的应用[J].电机与控制应用,2014,41(7): 6-9.
[3]任先进,余继良,王峰,等.永磁同步电机空间矢量脉宽调制系统仿真[J].电机与控制应用,2014,41(9): 12-16.
[4]张辑,彭彦卿,陈天翔.一种基于电流空间矢量的新型死区补偿策略[J].电工技术学报,2013,28(6): 128-132.
[5]黄文卿,张兴春,张幽彤.一种交流逆变器死区效应半周期补偿方法[J].电机与控制学报,2014,18(5): 23-29.
[6]张冀,徐科军.矢量控制电动执行器死区补偿新方法[J].电子测量与仪器学报,2015,29(2): 272-281.
[7]LIN Y K, LAI Y S. Dead-time elimination of PWM-controlled inverter/converter without separate power sources for current polarity detection circuit[J]. IEEE Transactions on Industrial Electronics,2009,56(6) : 2121-2127.
[8]罗毅飞,刘宾礼,汪波,等.IGBT开关机理对逆变器死区时间的影响[J].电机与控制学报,2014,18(5): 62-68.
[9]PARK O S, PARK J W, BAE C B, et al. A dead time compensation algorithm of independent multi-phase PMSM with three-dimensional space vector control[J]. J Power Electron,2013,13(6): 886-894.
[10]INOUE Y, YAMADA K, MORIMOTO S, et al. Effectiveness of voltage error compensation and parameter identification for model based sensorless control of IPMSM[J]. IEEE Transactions on Industry Applications,2009,45(1) : 213-221.
[11]乔鸣忠,夏益辉,朱鹏,等.基于电流闭环和死区补偿的变频驱动调速系统低频振荡抑制[J].电工技术学报,2014,29(11): 127-133.
[12]杨荣峰,随顺科,徐榕,等.级联SVG控制策略及死区补偿技术研究[J].电机与控制学报,2014,18(10): 36- 41.
[13]刘栋良,武瑞斌,张遥,等.基于模糊控制零电流钳位逆变器死区补偿[J].电工技术学报,2011,26(8): 119-124.
[14]SEON-HWAN H, JANG-MOK K. Dead time compensation method for voltage-fed PWM inverter[J]. IEEE Transactions on Energy Conversion,2010,25(1) : 1-10.
[15]李春鹏,贲洪奇,孙绍华,等.采用扰动观测器的并网逆变器死区补偿方法[J].电机与控制学报,2013,17(3): 28-33.
[16]LEE D H, AHN J W. A simple and direct dead-time effect compensation scheme in PWM-VSI [J]. IEEE Transactions on Industry Applications,2014,50(5): 3017-3025.
Analysis and Compensation on Dead-Time Effect of Permanent Magnet Synchronous Motor Based on Space Vector Pulse Width Modulation*
LIUKun,FANCaiyun,HANKun,ZHENShuai,HEQinglian
(XJ Electric Co., Ltd., Xuji Group Gorporation, Xuchang 461000, China)
In motor driver, dead-time may prevent leg straight, while increasing the inverter output harmonic components, resulting the distorted voltage and current. Especially lead to the motor in unstable operation at low speed. To solve the problem, a dead-time compensation method was proposed, which was based on the detection of disturbed voltage. Firstly, to get the three-phase current direction by judging the output voltage vector angle, and then the compensation voltage vector was determined. Meanwhile, to improve the quality of the output waveform, it combined elimination method of zero-current clamp to the above compensation strategy. The method could compensate the error voltage caused by the dead-time and eliminate the zero-current clamp phenomenon. Simulation and experiments showed that this method could significantly improve the current waveform distortion, with good practical value.
dead-time effect; compensation voltage vector; error voltage; zero-current clamp; space vector pulse width modulation(svpwm); permanent magnet synchronous motor(PMSM)
河南省重大科技专项(141100210100)
刘堃(1983—),男,硕士研究生,工程师,研究方向为大功率电力电子技术。
范彩云(1973—),女,硕士研究生,高级工程师,研究方向为电力电子传动。
TM 351
A
1673-6540(2016)09- 0056- 06
2016-03-29
猜你喜欢
电工技术学报(2022年20期)2022-10-29
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
微电机(2022年1期)2022-03-21
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
工程数学学报(2020年6期)2021-01-09
通信电源技术(2018年3期)2018-06-26
科技创新与应用(2017年1期)2017-05-11
航空兵器(2016年5期)2016-12-10
现代防御技术(2016年1期)2016-06-01
