
机动多目标跟踪中的传感器控制策略的研究
2016-11-08 01:53陈辉韩崇昭
自动化学报 2016年4期
陈辉 韩崇昭
机动多目标跟踪中的传感器控制策略的研究
陈辉1,2韩崇昭2
针对机动多目标跟踪中的传感器控制问题,本文提出一种基于信息论的多模型多伯努利滤波器的控制方案.首先,基于随机有限集(Random finite set,RFS)方法给出信息论下的传感器控制的一般方法;其次,本文给出多模型势均衡多目标多伯努利滤波器的序贯蒙特卡罗实现形式.此外,提出一种目标导向的多伯努利概率密度的粒子采样方法,并借助该方法近似多目标概率密度,继而利用Bhattacharyya距离求解最终的控制方案.典型机动多目标跟踪问题的仿真应用验证了本文传感器控制方法的有效性.
传感器控制,机动多目标,目标导向,随机有限集
引用格式陈辉,韩崇昭.机动多目标跟踪中的传感器控制策略的研究.自动化学报,2016,42(4):512−523
目标跟踪中的传感器控制[1](亦称为传感器管理)的核心思想是依据一定的最优准则,选择传感器的工作方式及运行参数以确保能够从全局使目标跟踪的性能达到最优.它本质上属于最优非线性控制问题[2].对于一个自主可控的单传感器,它的控制运行轨迹会影响到目标跟踪系统的性能,而控制它的轨迹的主要目的是依据某种评价准则使得多目标跟踪系统整体跟踪性能达到最优.这类问题的解决通常在部分可观测马尔科夫决策过程(Partiallyobserved Markov decision processes,POMDPs)的理论框架下进行[3].但由于目标运动参数未知(状态空间上的不确定性),目标往往又是机动运行的(模型的不确定性),跟踪任务中不可避免的会同时出现多个目标,加上传感器量测误差、传感器漏检和杂波的共存带来的量测起源的不确定性,传感器对各个目标的最优运行轨迹相互制约,综合以上这些因素使得求解机动多目标的传感器轨迹控制的优化策略其实是非常困难的.
基于随机有限集(Random finite set,RFS)的多目标跟踪算法由于提供了一种无需进行数据关联即可解决多目标跟踪问题的理论框架而广受关注.该方法将多目标状态和量测利用RFS进行建模,从集值估计的整体角度描述和解决多目标跟踪问题.这种集值估计的理论体系为传感器控制的研究提供了很大的便利,可以从集值随机变量所描述的多目标跟踪的整体状态信息对传感器控制的决策做指导. Mahler已经利用有限集统计(Finite set statistics,FISST)理论[1]将基于信息论的传感器控制方法推广到更一般的情况,使得解决更为复杂的传感器系统控制成为可能.近几年,国外已有一些学者基于FISST的多目标递推贝叶斯滤波器求解并最终实现传感器的控制[4−7].但是,目前对基于FISST方法的机动多目标的传感器控制并没有得到系统性研究.
本文的主要内容是采用信息论方法研究机动多目标的传感器控制问题,对机动多目标概率密度提出了一种目标导向的多伯努利(Target-oriented multi-Bernoulli,TOMB)粒子采样方法,借助该采样方法去完成相应控制方案评价函数的求取.文中利用多模型(Multi-model,MM)方法去近似描述机动目标运动模式的不确定性,结合多模型多伯努利滤波器去递推描述机动多目标状态的不确定性,研究利用Bhattacharyya距离[8](Bhattacharyya distance)作为评价函数,利用TOMB采样方法求解评价函数并对传感器的运动做决策规划.在实验部分将对提出的传感器运行控制和机动多目标跟踪策略进行详细的分析研究.
1 问题描述
假定k时刻有nx(k)个目标,它们的状态分别为且每一个状态取值在目标状态空间同时,传感器在k时刻接收到nz(k)个量测为,每一个量测取值在观测空间那么,k时刻多目标状态和多目标量测都分别构成一个RFS,其中,F(X)代表所有X的有限子集组成的集合,F(Z)代表所有Z的有限子集组成的集合.考虑到目标的存活、消亡和新生,k时刻目标数目nx(k)是时变的.直角坐标系下的单目标状态向量它可表示为



其中,fk是系统的状态转移矩阵是过程噪声向量.对于一个运动模式未知的机动目标,显然fk是不易获取的.本文研究利用MM方法近似机动目标的运动模式,并在第3节详细推导并给出序贯蒙特卡罗多模型多目标多伯努利滤波器的一般实现形式.


本文传感器控制的目的是,基于连续的决策过程能够在线控制传感器的实时位置对应该位置传感器会收集到对应时刻的量测集假定过去时刻所有的传感器控制决策和量测集已知,以下将详细研究如何利用信息论方法对传感器下一时刻的运动(或位置)做决策.
2 基于信息论的传感器控制
本文的传感器控制的研究在POMDP理论框架下进行.POMDP包含几个要素.首先是当前状态信息的不确定性描述,RFS框架下即可用k时刻的多目标后验概率密度函数表示.其次,POMDP包括一套可实现的传感器控制集合Uk,每一个传感器控制决定传感器将来的位置.而最后一个关键的因素就是针对每一个传感器运动ν 给定一个相应评价函数基于信息论方法,本文选择将整体信息增益的测度作为传感器控制的评价指标,即将传感器控制后的多目标后验概率密度和多目标先验概率密度之间信息增量作为评价.
将 Uk+1:k+H表示为向后 H 步总的控制方案的集合,H≥1.最优控制序列可简写为则该序列按以下准则确定:

本文选用Bhattacharyya距离[8]作为多目标概率密度的信息增益的评价函数,距离越大说明传感器控制所获取信息越大.评价函数表示为

其中,BC(pk+H|k+H,pk+H|k)是对应分布间的Bhattacharyya系数,pk+H|k(X)是H 步预测多目标概率密度,pk+H|k+H(X;νH)是采用控制νH后的后验多目标概率密度.这两个概率密度的计算可连续递推H步的最优多目标贝叶斯递推滤波公式进行计算.最优多目标贝叶斯递推滤波公式为

其中,fk|k−1(Xk|Xk−1)和gk(Zk|Xk)分别是多目标状态转移密度和多目标似然函数.
为做出最优传感器控制决策,对于式(7)应考虑H→∞时的多目标概率密度,但是,精确的目标运动模型难以获取,过程噪声的存在使得较高的H就会显著影响到多步预测的多目标概率密度的准确性,而机动目标的模型本身存在着更大的不确定性.另外,控制集合Uk+1:k+H的势会伴随着H的增大呈指数增长.为了简化计算,我们选择一步控制方法,即H=1,该方案又被称为“Myopic”方案[11].
式(7)评价函数的计算必须要求解式(8)和(9),但它们并不存在闭式解.文献[4]利用多目标状态粒子的采样去近似相应的多目标概率密度.但对于随机集合的采样,不仅包含目标个数的采样,而且包含目标状态的采样,运算处理非常复杂.本文将在第4节提出一种基于目标导向的多伯努利(TOMB)的粒子采样方法,直接在单目标状态空间上进行采样,逼近相应的多目标概率密度.
另外,需要考虑如何在“Myopic”方案下根据k时刻每一个可能的控制ν 生成量测集合Zk(ν).依据检测概率pD和杂波强度λC按照式(4)和(5)生成量测是一种直观的做法,但是这样会带来极大的计算负担.我们借鉴文献[4,11]的做法,在不考虑杂波和量测噪声,以及检测概率pD=1的理想情况下,对每一个ν 仅生成一个量测集,这个理想量测集合可表示为

3 机动多目标跟踪的多伯努利滤波器的实现
3.1多伯努利随机有限集
若X是状态空间X上的(单)伯努利RFS,它可用单目标存在概率r和单目标状态分布p来联合表示,而X的势分布是一个参数为r的伯努利分布.若∅表示空集,伯努利RFS的概率密度为[12]
若X是状态空间X上的多伯努利RFS,它是一个确定数目且相互独立的伯努利RFS的集合.组成X的第i个伯努利RFS表示为X(i),它的存在概率为r(i),概率密度为p(i),i=1,···,M是伯努利RFS的索引,那么显然,它的势平均为则X 的概率密度π可表示为且

为描述方便,可以将上述密度简写为参数集表达形式[13],即
3.2势均衡多目标多伯努利滤波器
区别于PHD[14]和CPHD[15]多目标矩递推滤波器,多目标多伯努利(Multi-target multi-Bernoulli,MeMBer)滤波器直接近似递推了多目标状态的后验概率分布,使得多目标跟踪问题的求解及其状态的递推估计显得更为直观.Vo等已证明MeMBer滤波器存在势的过估计[13],且基于后验多目标概率密度的概率生成泛函(Probability generating functional,PGFl)给出一种势修正策略,提出势均衡多目标多伯努利(Cardinality balanced MeMBer,CBMeMBer)滤波器.相对于传统的SMC-PHD和传统的SMC-CPHD滤波器,SMC-CBMeMBer滤波器可以更方便可靠地进行状态的提取和估计[13].以下先给出CBMeMBer滤波器的递推公式.
1)预测步
假设k−1时刻后验多目标多伯努利密度表示为

则预测的多目标密度也是一个多伯努利密度

2)更新步
令CBMeMBer滤波器预测多目标多伯努利密度为

那么后验多目标密度可用多伯努利密度近似如下

其中,Zk是k时刻量测集是继承航迹(漏检)的多伯努利密度参数集,若检测概率表示为则


3.3机动多目标滤波器的实现
CBMeMBer滤波器无法直接求取闭式解,并且考虑到机动多目标跟踪的要求,以下给出序贯蒙特卡罗多模型CBMeMBer(Sequential Monte Carlo MMCBMeMBer,SMC-MMCBMeMBer)滤波器的实现形式.
对于一个机动目标,通常可用多个目标模型的混合去近似它的运动模型,即多模型(MM)方法.模型参数定义为{dk}∈M,M是所有可能的目标模型构成的集合,考虑一个跳变的马尔科夫状态空间系统(Jump Markov state space systems,JMSS),目标模型{dk}根据一个确定的马尔科夫链随时间进行演变.首先,扩维目标的新状态

那么对于式(13),在状态扩维的情况下,假设k−1时刻概率密度为

1)预测步
将式(25)带入式(15),得到伯努利RFS预测的存在概率

JMSS的状态演化模型可表示为

其中,p(dk|dk−1)是模型转移概率的马尔科夫链.
先来采样模型粒子



对于k时刻新生多伯努利密度,第i个伯努利RFS的概率密度表示为


新生粒子权重

那么,对应的新生概率密度
2)更新步
那么,更新后的多目标密度可表示为

其中,Zk是执行传感器控制方案后,传感器在相应的控制位置所接收到的量测.
将式(39)代入式(19)和(20),继承航迹(漏检部分)所对应的多伯努利密度的参数

量测更新航迹多伯努利密度的参数

其中

3)重采样
为减少粒子退化对滤波器估计性能的影响,对每一个假设航迹的粒子集进行重采样.新粒子按照更新后的粒子权重的大小进行重采样,对应航迹的重采样规模是单目标平均采样个数是更新后的第i个航迹的存在概率.为保证每个假设航迹的粒子采样个数,可设置每个航迹的粒子采样规模不小于Lmin.
4 传感器控制的求解
4.1目标导向的多目标概率密度的采样方法
如第2节所述,我们采用H=1的“Myopic”控制方案.那么,对所有的控制方案计算相应的评价函数,然后依据式(6)确定k时刻的最终控制方案.评价函数的求解必须近似求解相应的多目标概率密度,可采用多目标SMC方法,即复杂的集合采样方式[4].本文以下将基于多伯努利密度,提出一种目标导向的多伯努利(TOMB)密度的粒子采样方法,直接在单目标状态空间上进行采样去逼近多目标概率密度.
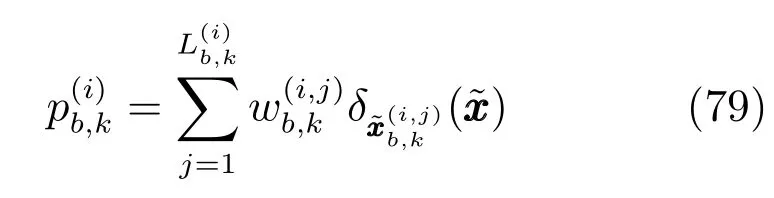
式(12)利用多伯努利概率密度去近似多目标概率密度.当从多目标状态空间上采样时,由于多伯努利RFS是相互独立的(单)伯努利RFS的集合[13],r(i)表示第i个伯努利RFS(航迹)的存在概率,因此,我们将多目标密度粒子采样过程分两步进行.首先,根据r(i)的取值采样航迹;其次,再对已采样航迹的概率密度p(i)进行采样.对于第l次采样,这种采样方式可以表示为

这种采样方法将使采样过程集中于r(i)较大的RFS的概率密度,即以事实上的目标航迹的采样为主导.那么经过多次采样以后,所有粒子的加权和将逼近于多目标多伯努利RFS的概率密度π.
1)伯努利RFS(航迹)的采样
r(i)代表第i个伯努利RFS的存在概率,则设计航迹的采样分布

2)状态的采样
假设第i个伯努利RFS的概率密度p(i)可用加权粒子集近似表达,那么状态采样的分布

其中,w(i,j)是对应状态粒子的权重.
4.2传感器控制方案的决策
我们利用TOMB的粒子采样方法近似预测的多目标概率密度,则预测的多目标概率密度

如第2节所分析,控制方案的理想量测集合不考虑杂波,且检测概率pD=1.在这种理想情况下,不存在继承航迹(漏检)的伯努利RFS,而对于量测更新的伯努利RFS,即,参考式(21),此时

这就意味着,每个理想量测的伯努利RFS(航迹)的存在概率都恒为1.在这种情况下,如果根据提出的TOMB粒子采样方法,对于各个量测更新RFS(航迹)的采样是等概率的.参考第3节的采样过程,SMC-MMCBMeMBer滤波器的更新多伯努利概率密度和预测多伯努利概率密度对应同样的粒子集,只是粒子权重不同.所以,根据后验密度的表达式,后验多目标密度可近似为

其中,j∗代表采样粒子对应的预测伯努利RFS(航迹)的索引.
一步控制方案(Myopic)的评价函数为

利用提出的TOMB粒子采样方法可以近似多目标概率密度,将式(55)和(57)代入式(64),多项式相乘后狄拉克δ函数的正交项全为0,则

将上式的被积函数展开,再次利用δ函数的正交项为0消除多余项,评价函数最终可近似为
4.3总体算法程序的伪码
为了说明提出算法的总体流程,列出算法伪码如下:

步骤1.预测和新生


步骤2.传感器控制
按照TOMB采样方法近似估计pk|k-1(X).
确定所有可能的控制集合Uk,并对每个确定传感器
位置xs,k(ν),按生成相应量测集合Zk(ν).
按Zk(ν),根据式(57)∼(63)近似估计pk|k(X).
步骤3.更新


步骤4.航迹删减和重采样

删除第i个航迹;
else
end if
end for
步骤5.状态提取

5 仿真分析
5.1多目标跟踪性能评价
为了能联合评价多目标势估计和多目标状态估计的综合性能,本文采用OSPA(Optimal subpattern assignment)距离[16]来评估多目标跟踪的质量.先给出OSPA的定义:设多目标状态的真值集合为相应的状态估计集合若m≤n,则OSPA距离为

5.2机动多目标跟踪场景的设计
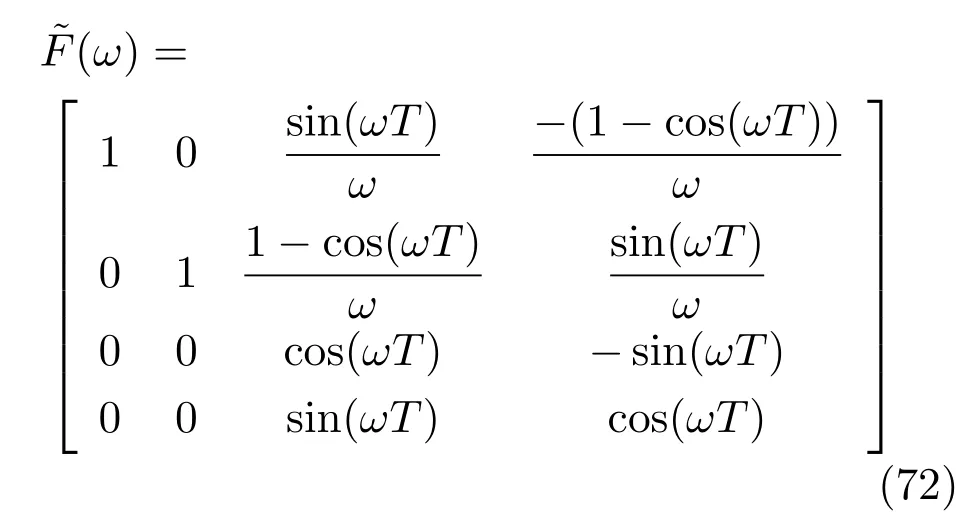
为了跟踪机动目标,以下采用常速(Constant velocity,CV)模型和协同转弯(Coordinated turn,CT)模型[17]的组合多模型对机动目标进行跟踪. CT模型对应可变的转角速度ω,模型演变的马尔科夫链

CV模型的状态向量参考式(1),状态转移密度
噪声矩阵

仿真区域内均伴随着目标的新生和消亡,对应着可变的目标数目(势),所有目标轨迹均采用随机机动模式,在CV和CT之间随机切换,目标运动模式随机切换的概率满足设定的马尔科夫链.若目标为CT运动,其对应的随机转角速度
5.3新生多伯努利密度的设计

对应的转换后的协方差


5.4传感器控制集合
传感器控制位置理论上是连续且存在无限多个,但这显然是没有必要的.我们采用启发式方法,在传感器运动容许的范围内选择典型的控制方案.如果k时刻传感器的实际控制位置为那么k+1时刻传感器控制集合为则选择所有可能的传感器位置为
式中,选择Nθ=8,NR=2,则总共对应17种控制方案(包含传感器不动).vs,c是传感器自身的容许控制速度,设为50 m/s.
5.5机动多目标距离方位跟踪
考虑机动多目标距离方位跟踪(Range-bearing tracking,RBT),模型轨迹如图1所示,传感器初始位置位于坐标原点,多目标的新生和消亡的时刻如表1所示.

图1 实际目标的轨迹Fig.1 Actual target trajectories
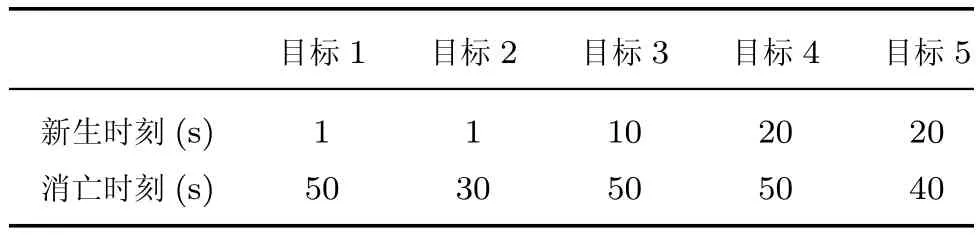
表1 目标存活周期Table 1 Survival periods of targets
对于距离方位跟踪(RBT),式(4)有如下形式:

量测采样周期T=1s,总共采样50次.杂波是一个泊松RFS,且在观测区域[0,2π]×[0,5000m]内均匀分布,每周期的杂波平均数为10个.目标存活概率为pS,k=0.98,检测概率pD,k=0.95.选取截断系数c=50m,距离阶次p=1.单航迹平均采样数Lk=500,单航迹最小采样数Lmin=100.航迹删除的存在概率阈值为10−4.仿真硬软件环境为:Matlab R2010a,Win7 SP1 64-bit,Intel Core i5-4570 CPU 3.20GHz,RAM 4.00GB.
利用第3节的SMC-MMCBMeMBer滤波器跟踪场景中的机动目标.给定4种传感器控制方案来对比验证本文控制算法对机动多目标的跟踪效果.其中,方案一是“Stationary”,代表静默方案,即传感器静止在原点.方案二是“Prior zigzag”,是预先设定好的传感器控制方案,如图2所示,传感器在实验内以恒速率运动并经历多个航向的变化产生机动,这是一个纯方位跟踪(Bearings-only tracking,BOT)中常用的“Zigzag”控制轨迹,为可靠保证多目标BOT的可观测性.方案三是“Random control”,代表每个时刻的传感器控制方案在控制集合中随机选取.方案四是“Proposed control”,即文中提出的传感器控制方案.

图2 先验控制方案Fig.2 Prior sensor control
图3是单次实验对机动多目标RBT跟踪中的传感器轨迹控制,看出轨迹呈复杂的“Zigzag”形状,在整体多目标跟踪的过程中,传感器会根据当前的滤波结果,根据提出的控制方案不断调整自身的位置以获取最大的观测信息量,保证传感器形成和所有目标全局最佳的观测位置,每个周期控制的目的都使得多目标后验概率密度相对于多目标先验概率密度的信息增量最大化,并伴随着目标机动、目标的新生和消亡都会呈现出显著的控制作用.

图3 距离方位跟踪中的传感器控制轨迹Fig.3 Sensor control trajectory in range-bearing tracking
为了验证提出的机动多目标传感器控制策略在RBT中整体的有效性,做200次Monte Carlo(MC)仿真实验.所有控制方案的多目标位置估计的OSPA距离均值如图4所示,目标个数(势)估计效果如图5所示.
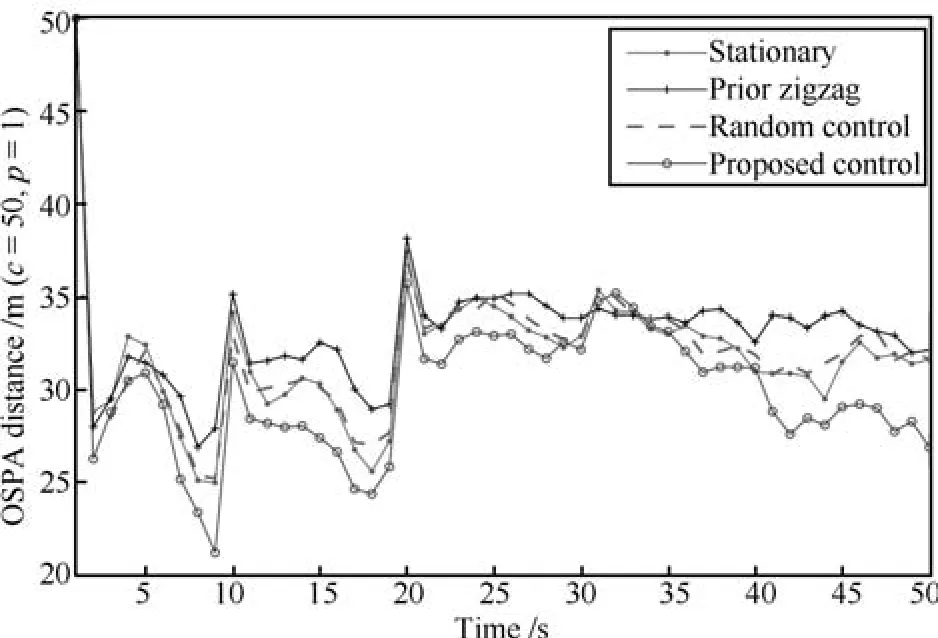
图4 距离方位跟踪中多目标位置估计OSPA的比较Fig.4 Position OSPA distances for different control strategies in range-bearing tracking
通过图4多目标跟踪的OSPA距离评价,可以分析不同传感器控制策略下机动多目标RBT的整体性能,虽然RBT具有完备的量测信息使得4种控制方案都有不错的跟踪性能,但本文所提出的控制策略相对于其他控制方案在多目标整体跟踪性能上具有明显的优势,显著提升了多目标跟踪的质量.图5是多目标势估计效果,各控制方案的势估计均值都接近于实际的目标势(图5(a)),但从表2仍然可以清晰看出本文的算法具有相对较小的势估计误差,而且从图5(b)也可以看出,本文算法具有相对稳定的势估计.注意到,方案一(Stationary)在这个实验中的跟踪效果整体要好于方案二(Prior zigzag),这也说明RBT的控制要求不同于传统的BOT,BOT更多的是需要考虑可观测因素,所以受传感器机动能力的影响很大.而RBT具有完备的测量信息,为了获取更好的跟踪效果,在传感器的实际控制上需要参考不同传感器位置的信息增量.本文正是结合给出的SMC-MMCBMeMBer滤波器,对机动多目标的多伯努利后验概率密度进行估计,以此为基础,依据提出的TOMB采样方法和对评价函数的具体求解,基于信息增益的最大化准则,总能为不同的机动多目标跟踪问题给出一个适合于当前条件下,使多目标后验概率密度信息增量最大化的控制策略.而因为这种基于信息测度的评价完全基于机动多目标状态(含模型参数)的后验概率密度,由它构造多目标跟踪的全局代价函数,使得控制策略整体考虑了影响到多目标跟踪质量的各种因素.

表2 单步势估计误差均值的绝对值Table 2 Absolute values of step-averaged cardinality error

图5 距离方位跟踪中目标个数估计的比较Fig.5 Cardinality statistics for different control strategies in range-bearing tracking
图6显示了机动多目标跟踪的MC仿真中所有实验的传感器控制位置(轨迹云).由于杂波个数、分布以及噪声的随机性,显然每次独立实验的传感器轨迹都不大可能一致,但是该轨迹云仍能够充分呈现出该场景下实现机动多目标RBT跟踪的最优轨迹控制的大致趋势.
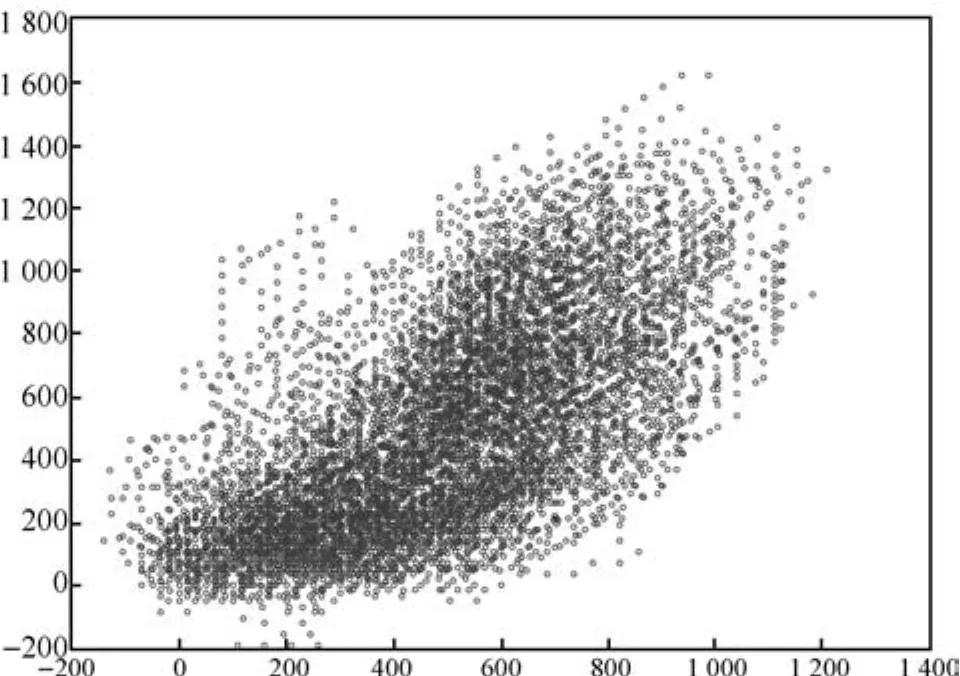
图6 距离方位跟踪蒙特卡罗仿真中所有传感器控制位置Fig.6 Total position for sensor control in range-bearing tracking
为了评价各个控制算法的计算效率,我们统计了MC仿真中程序单步运行的平均时间,如表3所示.从结构上看,整体控制算法分为多目标跟踪部分和传感器控制部分.由于4种控制方案在多目标跟踪部分都利用本文给出的SMC-MMCBMeMBer滤波器跟踪机动多目标,所以运行时间的实际差距在于传感器控制的计算.方案三仅需要在控制集合中随机选取,所以前三种方案的程序运行时间基本都由机动多目标跟踪本身所花费的时间所主导.而方案四相对其他控制方案所多出的计算时间则是计算后验和先验多目标概率密度的Bhattacharyya距离和最终的传感器控制求解所花费的时间,以换取多目标跟踪性能的显著提升.

表3 各方案单步平均运行时间Table 3 Step-averaged run time for different control strategies
6 结论与展望
本文主要的工作和创新是提出了一种机动多目标传感器控制策略,该方法在POMDP理论框架下进行.文中基于信息论方法利用Bhattacharyya距离作为传感器控制的评价指标,结合所研究的机动多目标跟踪问题给出了SMC-MMCBMeMBer滤波器的一般实现形式.此外,为求解最终的控制方案,提出了一种TOMB粒子采样方式去近似多目标概率密度,并基于该方法对最终控制方案进行求解.通过最终典型非线性多目标跟踪问题的仿真实验验证了提出控制策略的有效性.对于今后的工作,可以进一步开展目标跟踪中多传感器控制问题的研究,包括多传感器资源的合理分配和优化协同调度,并研究多传感器控制的最优准则.另外,本文虽然以RBT为例,但本文研究方法仍然适用于其他跟踪问题,尤其是一些对传感器轨迹控制有迫切需求的典型跟踪问题,例如纯角度跟踪(Angle-only tracking,AOT)问题、纯距离跟踪问题(Rangeonly tracking,ROT)等.
References
1 MahlerRPS.AdvancesinStatisticalMultisource-Multitarget Information Fusion.Norwood,MA:Artech House,2014.825−860
2 Mahler R P S,Zajic T R.Probabilistic objective functions for sensor management.In:Proceedings of the 2004 Signal Processing,Sensor Fusion,and Target Recognition XIII.Orlando,FL:SPIE,2004.233−244
3 Casta˜n´on D A,Carin L.Stochastic control theory for sensor management.Foundations and Applications of Sensor Management.US:Springer,2008.7−32
4 Ristic B,Vo B T.Sensor control for multi-object state-space estimation using random finite sets.Automatica,2010,46(11):1812−1818
5 Ristic B,Vo B N,Clark D.A note on the reward function for PHD filters with sensor control.IEEE Transactions on Aerospace and Electronic Systems,2011,47(2):1521−1529
6 Hoang H G,Vo B T.Sensor management for multi-target tracking via multi-Bernoulli filtering.Automatica,2014,50(4):1135−1142
7 Beard M,Vo B T,Vo B N,Arulampalam S.Sensor control for multi-target tracking using Cauchy-Schwarz divergence. In:Proceedings of the 18th International Conference on Information Fusion(Fusion).Washington,D.C.:IEEE,2015. 937−944
8 Hero A O,Kreucher C M,Blatt D.Information theoretic approaches to sensor management.Foundations and Applications of Sensor Management.US:Springer,2008.33−57
9 Vo B N,Ma W K.The Gaussian mixture probability hypothesis density filter.IEEE Transactions on Signal Processing,2006,54(11):4091−4104
10 Vo B N,Singh S,Doucet A.Sequential Monte Carlo methods for multitarget filtering with random finite sets.IEEE Transactions on Aerospace and Electronic Systems,2005,41(4):1224−1245
11 Mahler R P S.Multitarget sensor management of dispersed mobile sensors.Theory and Algorithms for Cooperative Systems,Singapore:World Scientific Publishing Co.,2004,chapter 12,239−310
12 Mahler R P S.Statistical Multisource-Multitarget Information Fusion.Norwood,MA:Artech House,2007.655−667
13 Vo B T,Vo B N,Cantoni A.The cardinality balanced multitarget multi-Bernoulli filter and its implementations.IEEE Transactions on Signal Processing,2009,57(2):409−423
14 Mahler R P S.Multitarget Bayes filtering via first-order multitarget moments.IEEE Transactions on Aerospace and Electronic Systems,2003,39(4):1152−1178
15 Mahler R P S.PHD filters of higher order in target number. IEEE Transactions on Aerospace and Electronic Systems,2007,43(4):1523−1543
16 Schuhmacher D,Vo B T,Vo B N.A consistent metric for performance evaluation of multi-object filters.IEEE Transactions on Signal Processing,2008,56(8):3447−3457
17 Li X R,Jilkov V P.Survey of maneuvering target tracking. Part I:dynamic models.IEEE Transactions on Aerospace and Electronic Systems,2003,39(4):1333−1364
18 Duan Z S,Han C Z,Li X R.Comments on“Unbiased converted measurements for tracking”.IEEE Transactions on Aerospace and Electronic Systems,2004,40(4):1374−1377

陈 辉兰州理工大学电气工程与信息工程学院副教授.主要研究方向为目标跟踪和传感器管理.本文通信作者.E-mail:huich78@hotmail.com
(CHEN HuiAssociate professor at the School of Electrical and Information Engineering,Lanzhou University of Technology.His research interest covers target tracking and sensor management.Corresponding author of this paper.)

韩崇昭西安交通大学电子与信息工程学院教授.主要研究方向为多源信息融合,随机控制与自适应控制,非线性频谱分析.E-mail:czhan@mail.xjtu.edu.cn
(HAN Chong-ZhaoProfessor at the School of Electronic and Information Engineering,Xi'an Jiaotong University.His research interest covers multi-source information fusion,stochastic control and adaptive control,and nonlinear spectral analysis.)
Sensor Control Strategy for Maneuvering Multi-target Tracking
CHEN Hui1,2HAN Chong-Zhao2
In consideration of the sensor control problem for maneuvering multi-target tracking,this paper proposes an information theory based control policy using multi-model multi-Bernoulli filter.First,a sensor control approach is presented in the information theory framework based on random finite set.Then,the sequential Monte Carlo implementation of multi-model cardinality balanced multi-target multi-Bernoulli filter is formulated.Moreover,this paper proposes a target-oriented multi-Bernoulli particle sampling method to approximate multi-target probability density.And the final control policy based on Bhattacharyya distance is solved through this sampling method.Finally,simulation results show the effectiveness of the proposed sensor control approach applied to a typical maneuvering multi-target tracking problem.
Sensor control,maneuvering multi-targets,target-oriented,random finite set(RFS)
Manuscript August 19,2015;accepted January 15,2016
10.16383/j.aas.2016.c150529
Chen Hui,Han Chong-Zhao.Sensor control strategy for maneuvering multi-target tracking.Acta Automatica Sinica,2016,42(4):512−523
2015-08-19录用日期2016-01-15
国家自然科学基金(61370037,61005026),甘肃省自然科学基金(1506RJZA090),甘肃省高等学校科研项目(2014A-035)资助
Supported by National Natural Science Foundation of China(61370037,61005026),Natural Science Foundation of Gansu Province(1506RJZA090),and Foundation of Higher Education of Gansu Province(2014A-035)
本文责任编委潘泉
Recommended by Associate Editor PAN Quan
1.兰州理工大学电气工程与信息工程学院兰州7300502.西安交通大学电子与信息工程学院综合自动化研究所西安710049
1.School of Electrical and Information Engineering,Lanzhou University of Technology,Lanzhou 7300502.Institute of Integrated Automation,School of Electronic and Information Engineering,Xi'an Jiaotong University,Xi'an 710049
猜你喜欢
中学数学研究(江西)(2021年3期)2021-03-11
数学学习与研究(2020年15期)2020-11-28
河北建筑工程学院学报(2020年4期)2020-04-29
青年歌声(2019年12期)2019-12-17
物理与工程(2019年1期)2019-03-22
安庆师范大学学报(自然科学版)(2018年3期)2018-09-07
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
发明与创新(2016年5期)2016-08-21
课程教育研究·学法教法研究(2016年7期)2016-04-26
