MEMS执行机构在微小力传感器量值溯源中的应用*
2016-11-04 09:11郑培亮黄振宇
传感器与微系统 2016年11期
徐 立,郑培亮,李 闯,黄振宇,李 倩
(1.广东省现代几何与力学计量重点实验室,广东 广州 510405;2.广东省计量科学研究院,广东 广州 510405)
应用技术
MEMS执行机构在微小力传感器量值溯源中的应用*
徐 立1,2,郑培亮1,2,李 闯1,黄振宇1,2,李 倩1
(1.广东省现代几何与力学计量重点实验室,广东 广州 510405;2.广东省计量科学研究院,广东 广州 510405)
对一种基于微电子机械系统(MEMS)执行器结构的非接触式三维微小力装置测量原理、装置结构、标定方法、力学特性及使用方法等进行分析。结果表明:该装置可产生空间任意方向微小力,实现空间非竖直方向微小力传感器量值溯源;利用该装置对微小力传感器进行量值溯源时,能大幅减小极板间距离测量与控制不确定度对输出微小力影响,装置无需配备复杂昂贵的位移控制与测量辅助装置便可达较高精度。对简化微小力传感器量值溯源装置结构具有较大实际意义。
微电子机械系统(MEMS)执行器; 微小力; 传感器; 量值溯源
0 引 言
随着现代科技发展,微小力学量应用日益广泛。微小力在微纳米量级加工技术、微小力传感器技术、生物力学量测量、液体表面张力研究、微观摩擦现象观测及微型卫星、微型间谍飞行器姿态调整与定位等诸多领域具有重要作用。但对mN量级以下微小力,其可溯源测量技术目前仍处于研究阶段[1,2]。微小力传感器量值溯源仍直接溯源到质量,由于砝码本身质量制约,达到mg量级时,质量本身存在很大不确定度,且采用该方法还涉及重力加速度测量这一难题,采用砝码进行微小力量值溯源的适应性受到很大限制[3~6]。此外,微小砝码仅能产生竖直方向微小力,力是一个矢量,所需标准力为非竖直方向时,采用该方法将无法对其他方向微小力传感器进行量值溯源。
微电子机械系统(micro-electro-mechanical system,MEMS)中,执行器是一种应用普遍的功能性部件[7,8]。MEMS器件中执行器产生的力均为微小力,根据MEMS执行器结构原理能获得微小力源,满足微小力传感器量值溯源需要[9,10]。
本文基于MEMS执行器结构,设计一种非接触式三维微小力装置,利用该装置可产生空间任意方向微小力,实现空间非竖直方向微小力传感器量值溯源;且无需配备复杂昂贵的位移控制与测量辅助装置;能极大减少电容极板间距不确定度对输出结果影响,对简化微小力传感器量值溯源装置设计、降低装置成本、提高装置精度等都具有重要理论价值和实用意义。
1 基于MEMS执行器结构的非接触式三维微小力发生装置
1.1 装置结构
图1是一种在MEMS执行机构中普遍使用的结构。该结构一端固定(固定端),另一端能在某一自由度上活动(活动端),通过在叉指状结构两端施加电压,利用两叉指结构间静电力来驱动叉指活动端运动,实现MEMS装置各种功能。本文所研究装置即利用在两叉指间产生微小驱动静电力原理,设计一种非接触式三维微小力发生装置,利用微小静电力作为标准力源,并实现对空间任意方向施加微小力。本文所研究叉指如图1(b)所示[11]。

图1 叉指状结构图Fig 1 Interdigited structure image
装置结构如图2所示。

图2 三维微小力发生装置结构图Fig 2 Structure of 3D micro-force generator device
先根据输出微小力范围确定叉指电容间距离与位置以及施加在叉指电容两端电压;然后通过旋转平台配合方向调节杆调节微小力在空间中方位,方位调节好后便通过相应固定螺栓将方位固定,同时通过x,y,z方向调节装置精确调节两叉指电容器间距离与位置,使其达到所需距离和位置;最后控制加载电压大小以实现对输出微小力控制。
1.2 装置测量原理
根据Johnson W A等人[12]对MEMS执行器中叉指状结构间所受静电力理论分析,叉指结构两端施加电压U时,叉指间静电力为
(1)
式中 N为叉指个数,g为相邻叉指间距,x0为叉指重叠长度,g和x0定义如图3所示。

图3 叉指结构参数图[13]Fig 3 Parameters of interdigited structure
根据式(1),确定相邻叉指间距g及叉指交叉长度x0,则通过改变两叉指电容间加载电压U便可控制输出微小力值。同时,根据文献[13]分析,叉指尺寸参数满足一定条件时,叉指交叉长度x0变化对输出微小力影响极小,可认为g确定,则输出微小力便不随位置(x0)变化而改变。
2 三维微小力发生装置量值溯源
由于各国目前并未建立微小力量值溯源体系,微小力装置无法像中小力值或大力值设备一样进行量值溯源。在微小力研究中,目前各国研究人员普遍采用的量值溯源方式是将微小力溯源至微小质量,本文也采用该方式对装置进行标定,如图4。

图4 三维微小力发生装置标定原理图Fig 4 Calibration principle diagram of 3-dimensional micro-force generator device
图4中,叉指电容一部分固定在高精度电子天平上,另一部分部分连同位置调节装置固定在一台架上。调节x,y,z方向位置调节器,使叉指间距达到设定值,然后锁紧固定,保持叉指间位置不变,记录下此时高精度电子天平读数(m1)。对装置施加电压,将在叉指间产生微小力值,同时记录下此时电子天平读数(m2),通过计算电子天平两次读数之差,便可求出装置在加载电压下产生的微小力。改变施加电压,记录下电子天平对应读数,将结果进行拟合,得到施加电压与产生微小力间函数关系,如图5。
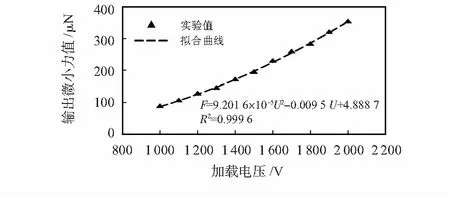
图5 加载电压与输出微小力值之间的关系Fig 5 Relationship between output micro-force value and voltage applied
图5为叉指重叠距离为5 mm时,经实验标定得到施加电压与输出微小力间函数关系。通过二次曲线拟合可得拟合关系式为
F=9.201 6×10-5U2-0.009 5 U+4.888 7
(2)
关联系数R2=0.999 6,输出微小力与加载电压平方成正比,该结果同时证明理论式(1)的正确。
由图5中标定曲线得到式(2),便可根据加载在微小力发生装置两端电压计算出所产生微小力。
3 三维微小力发生装置实验与测量
本文所研究新型装置除了能在空间产生任意方向微小力值外,其最大优势还在于叉指重叠长度变化对输出微小力影响很小,因此,该装置无需附加高精度位置控制装置与距离测量装置,便可以达到较高微小力输出精度。
图6为叉指重叠长度变化时,输出微小力与加载电压间关系。图中线状图为叉指交叉距离分别为4,5,6 mm时,依据式(1)所得理论值;点状图为叉指交叉距离分别为4,5,6 mm时通过实验标定所得输出微小力。由图可知,理论计算值与实验值吻合较好。当叉指距离变化时,三条理论计算曲线几乎重合;同时,叉指交叉距离变化时,在相同加载电压下,不同交叉距离时实验输出微小力也几乎重合。
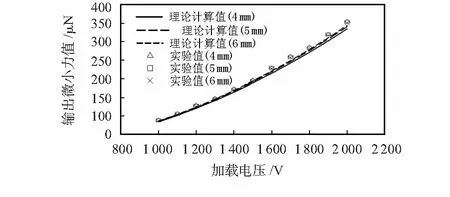
图6 叉指重叠长度变化时加载电压与输出微小力之间的关系Fig 6 Relationship between output micro-force and voltage applied by changing interdigited structure overlapping length
设x0=5 mm为标准状态,当叉指重叠长度由x0=4 mm变为x0=6 mm时,由图可知输出微小力几乎保持不变。在图示实验状态下,装置输出微小力仅与加载电压有关,叉指重叠长度变化对微小力输出结果影响较小。即叉指间重叠长度测量不确定度较大或叉指间位置控制装置精度较低,仍能保证输出微小力准确,使本文三维微小力发生器无需复杂位置控制附件和距离测量仪器便能实现较高精度三维微小力输出,对于简化装置结构,降低装置成本等都具有重要意义。
4 三维微小力发生装置使用
若微小力传感器在设备中位置如图7所示。使用本文装置对其进行量值溯源时无需将微小力传感器由装置卸下便可进行。先将三维微小力发生装置一端固定在待检仪器上,然后通过方向调节杆调节好所需微小力方向,并根据所需标准微小力值,通过xyz三个方向位置调节装置调节两叉指之间位置,将叉指间位置调节到可输出该力值范围内。再根据拟合曲线,确定加载电压,则可以输出相应方向标准微小力。
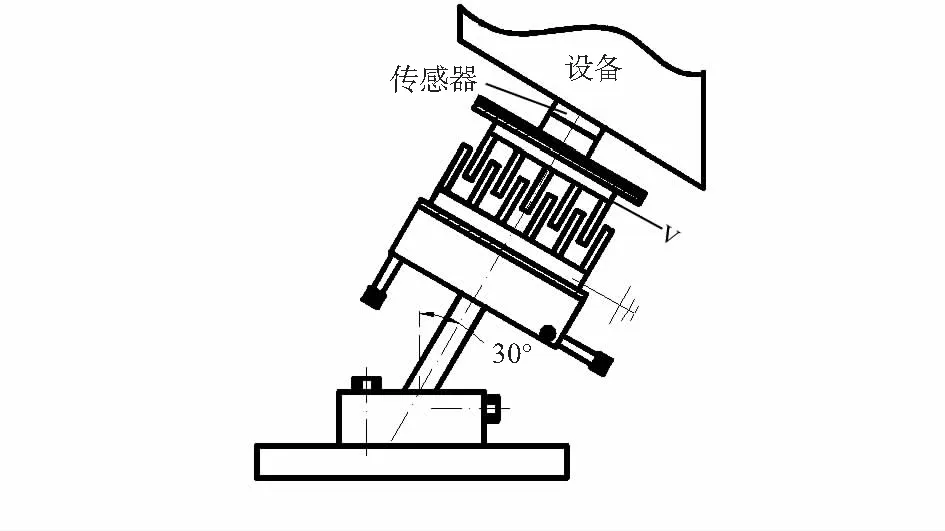
图7 装置工作示意图Fig 7 Principle of device working
5 结束语
本文基于MEMS执行器中叉指电容结构,设计一种空间三维微小力发生装置,搭建装置标定平台。结果表明:本装置能够产生空间任意方向微小力;加载电压与装置输出微小力具有良好拟合关系;且装置叉指间距变化时,输出微小力几乎不变,极大减小了距离测量与位置控制中不确定度对输出微小力影响,对简化微小力量值溯源装置设计具有实际意义。
[1] 刘 明,林玉池,郑叶龙,等.利用静电场原理复现微小力值的实验研究[J].传感技术学报,2012,25(1):33-37.
[2] 齐永岳,刘 明,林玉池,等.可溯源至质量的静电力复现与测量技术[J].仪器仪表学报,2011,32(5):1063-1068.
[4] 张 军,李寒光,李映君,等.压电式轴上六维力传感器的研制[J].仪器仪表学报,2010,31(1):73-77.
[5] Kim M,Pratt J R.SI traceability:Current status and future trends for forces below 10 micro Newtons[J].Measurement,2010,43(2):169-182.[6] Liu H,Yang S,Zhao Y,et al.A micro-force sensor with slotted-quad-beam structure for measuring the friction in MEMS bearing-s[J].Sensors (Basel),2013,13 (10) :13178-13191.
[7] 刘志远,于 娜,柴寿臣,等.振动电容式静电传感器设计[J].传感器与微系统,2010,29(5):116-118.
[8] 张 彧,王 文,赵小林,等.静电驱动振模微泵的理论分析[J].传感器与微系统,2013,32(1):25-28.
[9] Hailu Z,He S,Ben Mrad R.Hybrid micro electrostatic actua-tor[J].Microsyst Technol,2015(1):2424-2428.
[10] Fan Chao,He Siyuan.A micro-electro-static repulsive-torque rotation actuator with two-width fingers[J].Journal of Micro-mechanics and Microengineering,2015,25(9):95006-95014.
[11] Honma H,Takahashi K,Ishida M,et al.Fabrication of tunable plasmonic color filter using al subwavelength grating integrated with electrostatic comb-drive actuator[C]∥The 18th International Conference on Transducers,Solid-State Sensors,Actuators and Microsystems,IEEE,2015:2053-2056.
[12] Johnson W A,Warne L K.Electrophysics of micromechanical comb actuators[J].Journal of Micro-electro-mechanical Systems,1995,4(1):49-59.
[13] 徐 立,郑培亮,李 倩,等.叉指状微小力装置力学特性的数值模拟与分析[J].中国测试,2015,41(9):115-119.
徐 立(1983-),湖南长沙人,博士,主要从事MEMS技术、力学计量测试研究。
Application of MEMS actuator mechanism in micro-force sensor traceability*
XU Li1,2,ZHENG Pei-liang1,2,LI Chuang1,HUANG Zhen-yu1,2,LI Qian1
(1.Guangdong Provincial Key Laboratory of Modern Geometric and Mechanical Metrology Technology,Guangzhou 510405,China;2.Guangdong Provincial Institute of Metrology,Guangzhou 510405,China)
Application of micro-force sensor is widespread in the new industries and frontier technology.The micro force traceable measurement technology has seriously lagged behind the development of its application.Measuring principle,device configuration,calibration method,mechanical properties and usage of method of non-contact 3D micro-force device based on micro-electro-mechanical system(MEMS)actuator structure are analyzed.Results show that the device can generate micro-force in any direction,and be satisfied with demand for micro-force sensor traceability with non-vertical orientation is realized.The impact of distance measurement and control uncertainty on output micro-force can be significantly reduced by the device.The device can achieve high precision without complex and expensive auxiliary equipment.It has great practical meaning to simplify device structure in micro-force sensor traceability
micro-electro-mechanical system(MEMS) actuator;micro-force;sensor;traceability
10.13873/J.1000—9787(2016)11—0148—03
2015—12—01
国家质检总局科技计划资助项目(2013QK259); 广东省公益研究与能力建设专项资金项目(2014A040401044)
TH 71
A
1000—9787(2016)11—0148—03
猜你喜欢
数学杂志(2022年4期)2022-09-27
北京航空航天大学学报(2020年3期)2021-01-14
上海包装(2020年2期)2020-06-10
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年9期)2017-11-27
魅力中国(2016年50期)2017-08-11
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
吉林农业(2014年6期)2014-08-08
台州学院学报(2013年6期)2013-10-17