
地面天线目标捕获技术分析*
2016-11-01 03:27:38张宇
电讯技术 2016年4期
张 宇
(中国西南电子技术研究所,成都 610036)
地面天线目标捕获技术分析*
张 宇**
(中国西南电子技术研究所,成都610036)
针对空中机动平台与地面站宽带通信中的目标捕获问题,提出了地面天线目标捕获概率和捕获时间的计算方法。在数学建模的基础上,分析了不同天线扫描方式、扫描速度、飞机飞行状态的参数选择对捕获概率和捕获时间的影响,推导了其捕获概率的计算公式。仿真结果表明:初始捕获阶段,光栅扫描的捕获概率和捕获时间都明显优于螺线扫描;而在失锁重捕阶段,螺线扫描的捕获概率更高,且不受扫描速度的影响。该仿真结果已在工程设计中应用。
宽带通信;地面天线;目标捕获;光栅扫描;螺旋线扫描;捕获概率;捕获时间
地面天线目标捕获与跟踪系统是利用地面天线完成对飞行目标的捕获[1-3]、跟踪与失锁重捕功能。本文所述系统中飞机通过全向天线下发全球定位系统(Global Positioning System,GPS)信息,地面站天线对飞机可能出现的先验空域进行扫描,捕获载机GPS信号后对其实施跟踪,如果GPS信号丢失则对飞机进行失锁重捕。系统将飞机的GPS信息解算成伺服方位角和俯仰角并传送给伺服控制器,调整天线波束,使飞机始终处于波束覆盖范围内,从而可靠地连续接收信号,保障载机与地面站的宽带通信。本文通过仿真计算分析了天线扫描方式、扫描速度、飞机飞行状态的参数选择对捕获概率和捕获时间的影响,为工程实践提供了理论依据。
1 捕获概率分析
捕获概率是与天线总体效能密切相关的一项重要的综合性能指标,是指在一定的条件下天线能够正确无误地发现目标的能力[4]。在给定搜索总次数的条件下,发现目标这一事件发生的频率程度的量度定义为P=Nd/Ns。其中:P为捕获概率;Nd为发现目标次数;Ns为总搜索次数,当目标特性给定的条件下,由天线系统性能所决定。
本项目系统由系统控制器、伺服执行机构和天线组成,地面站天线通过相关搜索算法对先验空域扫描从而捕获目标,搜索空域越大,捕获概率越大,但捕获时间越长。捕获目标的基本环节为搜索区域覆盖住目标、探测到目标、识别到目标。根据以上分析,目标的捕获概率需要求出以下4个概率:
(1)目标落入天线搜索区域的概率,用PCZ表示;
(2)天线扫描方式与目标发生接触的概率,用PJCH表示;
(3)扫描波束与目标发生接触下检测到目标的概率,用PJCE表示;
(4)地面天线识别出目标的概率,用PSB表示。
则捕获概率P为以上4个概率之积:

式中:PCZ在本项目仿真中视为1,但在工程应用中,由于存在着系统延迟、测量误差、随机扰动等多种因素,其概率往往小于1;PJCH需要对天线扫描方式建模和目标运动建模分析;PJCE在本系统中为波束驻留时间超过150 ms的检测概率,根据PJCE捕获门限判定;PSB在本系统中看作是1。
1.1天线扫描方式建模
天线扫描方式与目标发生接触的概率PJCH中需要对天线扫描方式进行建模,建立天线在运载平台局部坐标系内指向角随时间变化的数学模型,如图1所示。

图1 天线扫描模型Fig.1 Antenna scan model
1.1.1光栅扫描
光栅扫描是沿着平行线扫过一段区域,类似于扇形扫描。光栅扫描一般分为水平扫描和垂直扫描两种,水平扫描是在水平方向上来回进行扫描,而垂直扫描则是在垂直方向上来回扫描。文献[5]给出光栅扫描公式如下:

式中:α为天线扫描方位角;β为天线俯仰角;a0为天线扫描初始方位角(单位rad);β0为天线扫描初始俯仰角(单位rad);θa为天线扫描方位范围(单位rad);θβ为天线扫描间隔(单位rad);nr为天线扫描栅格数;mod(x,y)为x对y取余;floor(x)为取x的整数部分。光栅扫描轨迹如图2所示。

图2 光栅扫描Fig.2 Raster scan
1.1.2螺线扫描
天线锥角是以固定的速度增加,α为天线方位角,β为天线俯仰角,扫描轨迹如图3所示。

图3 螺线扫描Fig.3 Helical scan
根据直角坐标系中的阿基米德螺线方程得到

1.2PJCE捕获门限的判定
以光栅扫描为例,目标飞机每100 ms发送一次GPS信息,假如天线作光栅扫描在t1时刻的方位和俯仰为(α1,β1),在t1时刻飞行目标与天线的方位和俯仰角为(ε1,η1),Wbeam为波束宽度,如果同时满足α1-ε1≤Wbeam、β1-η1≤Wbeam,则认为目标进入照射范围,因为要保证波束驻留时间超过150 ms才能保证接收到信号,所以取t1时刻后200 ms的t2时刻,再次计算t2时刻的方位和俯仰(α2,β2)、(ε2,η2);如果同样满足α2-ε2≤Wbeam,β2-η2≤Wbeam,则认为天线捕获到了目标,时刻t2为捕获时间。捕获门限判定设计如图4所示。

图4 捕获门限Fig.4 Acquisition threshold
2 捕获算法设计
2.1初始捕获算法设计
读入伺服所在位置的经度、纬度和高度,选择扫描的方式,设置扫描的区域、波束扫描的步长、扫描速度等。扫描过程中,一旦接收到GPS信息,则对GPS获取信息的经度、纬度和高度进行坐标变换,微调伺服的方位、俯仰角度,开始捕获目标。根据捕获门限的判定方法判断是否捕获到目标,如没有捕获到目标,则继续搜索,确定捕获到目标则根据累计信息起始航迹,进入稳定跟踪状态。跟踪采用传统卡尔曼滤波方法。目标初始捕获算法流程如图5所示。
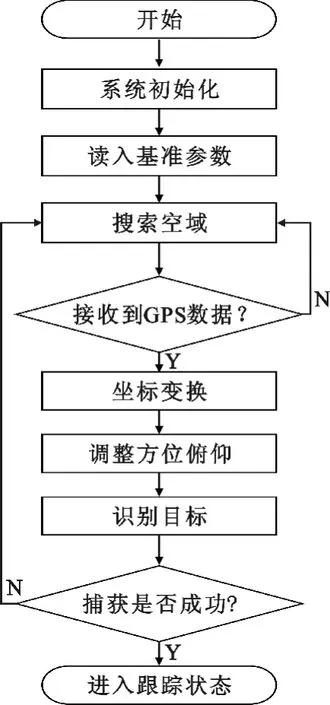
图5 目标初始捕获算法流程Fig.5 The flow chart of target initial acquisition
2.2失锁重捕算法设计
地面天线连续N秒(N为目标丢失时间门限)没有接收到数据链信号则认为是目标丢失了。根据目标丢失的位置、目标的当前飞行速度、目标与天线的位置关系来计算出一个最大的重捕区域,计算方法为以最初丢失点P为中心、半径为R=(v×(N+Td)+tan(σr)×Dd)的范围作为重捕区域(Td为系统时延,σr为量测误差,Dd为机-地距离)对该范围进行小范围的快速扫描,最后得出重捕时间和重捕概率。目标失锁重捕算法流程见图6。

图6 目标失锁重捕算法流程Fig.6 The flow chart of target losing lock reacquisition
2.3坐标系转换
本系统中飞机搭载的GPS系统采用地心大地坐标系(B,L,H),地面天线目标捕获与跟踪系统采用站心极坐标系(γ,β,ε),因此坐标转换过程依次为地心大地坐标系(B,L,H)、地心空间直角坐标系(X,Y,Z)、站心坐标系(X,Y,Z)H、站心极坐标系(γ,β,ε)。
文献[6]给出了坐标转换的方法,由大地坐标系向空间直角坐标系转换的关系为
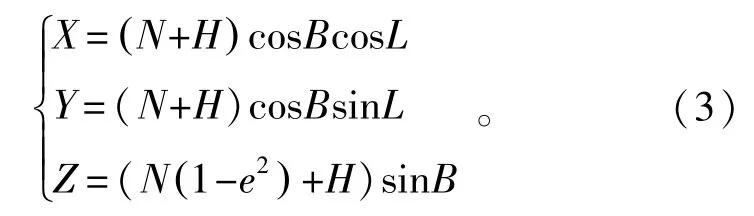
式中:N为椭球的卯酉圈曲率半径,

e2=(a2-b2)/a2,a、e分别为该大地坐标系对应椭球的长半轴和第一偏心率。
站心坐标系与地心空间直角坐标系之间的转换关系为

极坐标系(γH,βH,εH)中:γH为雷达站到目标T的距离;βH为目标方位角;εH为目标俯仰角。进行转换得到

3 仿真分析
3.1扫描速度对捕获概率和捕获时间的影响
仿真条件:在整个天线初始捕获部分,设天线方位角、俯仰角测量精度相同,且其均方根误差为0.6°,天线采样周期T=0.1 s,天线所在位置P=(0,0,0),GPS精度15 m,扫描步长为1,波束宽度Wbeam=2°,符号“/”表示没有捕获到目标,捕获时间为秒。扫描空域为方位[-45°,45°]、俯仰[0°,60°],天线扫描速度分别取ω=[1,10]°/s,仿真次数1 000次。目标在x方位[7,250]km、y方位[-250,250]km、z方位[0,]12 km的范围内随机产生,保证PCZ=1。采用零加速度模型和常加速度模型模拟飞机爬升、巡航、机动、下降等飞行状态,仿真计算捕获概率时,飞行状态在以上4种状态中随机选取。
由表1得出光栅扫描平均捕获时间受速度影响明显,速度越大捕获时间越小,捕获概率较为平稳。螺线扫描平均捕获时间对扫描速度不敏感,均在400 s左右才能捕获,捕获时间较长,捕获概率随扫描速度降低而明显降低;初始捕获阶段,光栅扫描捕获时间短,捕获概率高,明显优于螺线扫描。

表1 不同扫描速度的捕获概率和捕获时间Tab.1 The acquisition probability and acquisition time of different scanning speed
3.2扫描速度对重捕概率和重捕时间的影响
仿真条件:目标在3.1所述条件下被初始捕获,并进入稳定跟踪状态后,设定失锁判定时间为5 s,如目标失锁超过失锁判定时间,则进入重捕阶段,按失锁重捕算法计算重捕概率和重捕时间。
由表2得出重捕阶段光栅扫描随扫描速度的增加,重捕概率明显降低,重捕时间变化不大;螺线扫描不受扫描速度的影响,重捕概率无较大变化且明显高于光栅扫描,重捕时间与光栅扫描相当。
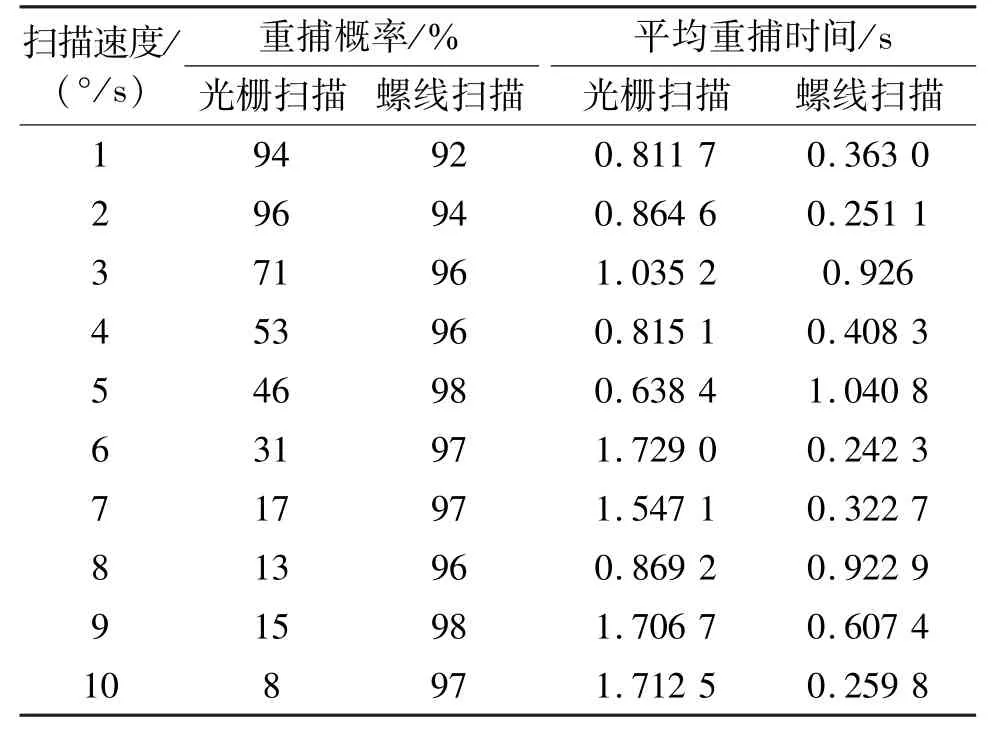
表2 失锁5 s重捕概率和重捕时间Tab.2 The reacquisition probability and reacquisition time of losing lock 5 s
4 结束语
根据工程实际需求,本文分析了不同天线扫描方式、扫描速度、飞机飞行状态的参数选择对捕获概率和捕获时间的影响,构建了捕获概率计算模型,设计了扫描波束与目标发生接触下检测到目标的概率的计算方法。仿真结果表明:初始捕获阶段,光栅扫描无论在捕获概率还是捕获时间上都优于螺线扫描,结合捕获时间建议选用速度大于5°/s的光栅扫描方式;失锁重捕阶段,光栅扫描随扫描速度增加,
重捕概率降低,螺线扫描的重捕概率明显高于光栅扫描,并且不受扫描速度的影响,两者重捕时间相当,因此建议采用螺线扫描方式。本文仿真结果采用零加速度模型和常加速度模型模拟飞机飞行状态,因此下一步重点考虑将实飞数据与天线目标捕获仿真结合进行研究。
[1]翟政安,唐朝京.星间天线捕获与跟踪策略[J].宇航学报,2009,30(5):1947-1952. ZHAI Zhengan,TANG Chaojing.Strategy for inter-satellite antenna acquisition and tracking[J].Journal of Astronautics,2009,30(5):1947-1952.(in Chinese)
[2]LU G,LU Y M,DENG T P,et al.Automatic alignment of optical beam based GPS for free-space laser communication system[J].Proceedings of the SPIE,2004,5160(1):432-438.
[3]袁远,李金喜,方正.一种基于扩频机制的定向天线捕获跟踪方法[J].航空电子技术,2012,43(3):6-9. YUAN Yuan,LI Jinxi,FANG Zheng.Directional antenna capturing and tracking method based on direct sequence spread spectrum[J].Avionics Technology,2012,43(3):6-9.(in Chinese)
[4]陈培彬.基于马尔可夫过程的活动目标侦察雷达搜索效率模型研究[J].情报指挥控制系统与仿真技术,2004,26(5):34-37. CHEN Peibin.Scouting efficiency model of reconnaissance radar for moving target based on markov process[J].Information Command Control System and Simulation Technology,2004,26(5):34-37.(in Chinese)
[5]丁鹭飞,耿富录.雷达原理[M].西安:西安电子科技大学出版社,2002. DING Lufei,GENG Fulu.Radar principle[M].Xi'an:Xidian University Press,2002.(in Chinese)
[6]方正,丁勇飞,龚诚.采用扩频技术的数字天线跟踪系统设计[J].电讯技术,2014,54(5):615-620. FANG Zheng,DING Yongfei,GONG Cheng.Design of digital antenna tracking system with spread spectrum technology[J].Telecommunication Engineering,2014,54(5):615-620.(in Chinese)

张 宇(1981—),男,河北魏县人,2009年于西南交通大学获硕士学位,现为工程师,主要研究方向为数据挖掘与数据处理。
ZHANG Yu was born in Weixian,Hebei Province,in 1981.He received the M.S.degree from Southwest Jiaotong University in 2009.He is now an engineer.His research concerns data mining and data processing.
Email:375639604@qq.com
Analysis of Target Acquisition Technology by Ground Antenna
ZHANG Yu
(Southwest China Institute of Electronic Technology,Chengdu 610036,China)
For target acquisition in broadband communication between mobile platform and ground station,a calculation method for target acquisition probability and acquisition time by ground antenna is proposed. By mathematical modeling,influence of parameter selection of antenna scanning style,scanning speed and aircraft flight status on acquisition probability and acquisition time is analyzed,and the computation formula of acquisition probability is derived.Simulation results show that,at initial acquisition stage,the acquisition probability and acquisition time by raster scan exceed those by helical scan,and at losing lock reacquisition stage,the acquisition probability by helical scan is higher and independent of scanning speed.These simulation results have been applied in engineering design.
broadband communication;ground antenna;target acquisition;raster scan;helical scan;acquisition probability;acquisition time
TN820.4
A
1001-893X(2016)04-0448-05
10.3969/j.issn.1001-893x.2016.04.017
张宇.地面天线目标捕获技术分析[J].电讯技术,2016,56(4):448-452.[ZHANG Yu.Analysis of target acquisition technology by ground antenna[J].Telecommunication Engineering,2016,56(4):448-452.]
2016-01-05;
2016-03-22 Received date:2016-01-05;Revised date:2016-03-22
**通信作者:375639604@qq.com Corresponding author:375639604@qq.com
猜你喜欢
幼儿园(2021年12期)2021-11-06 05:10:20
东北大学学报(自然科学版)(2020年6期)2020-06-16 03:07:32
新高考·高二数学(2019年1期)2019-06-28 13:28:12
通信技术(2019年3期)2019-05-31 03:19:08
新高考·高一数学(2019年1期)2019-04-15 10:48:58
新世纪智能(数学备考)(2019年1期)2019-04-10 07:45:38
电子测试(2018年6期)2018-05-09 07:31:54
声学与电子工程(2017年1期)2017-06-22 11:30:09
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
