
基于HALCON的移动车辆检测方法研究
2016-10-22 02:22鲍岚辉蔡竞
现代计算机 2016年26期
鲍岚辉,蔡竞
(浙江警察学院刑事科学技术系,杭州 310053)
基于HALCON的移动车辆检测方法研究
鲍岚辉,蔡竞
(浙江警察学院刑事科学技术系,杭州310053)
为了实现移动车辆的快速准确识别,基于HALCON软件提出一种移动车辆自动识别方法,根据帧差法原理将视频序列中当前帧图像分别与相邻前、后两帧作差,再将差值作“与”运算,通过设定分割阈值检测出移动的目标,最后结合目标区域几何特征筛选出移动车辆。实验结果表明,这种方法检测正确率高,且适用于多个移动目标检测场景。
HALCON;目标检测;帧差法;三帧差法
0 引言
随着车辆数目的急剧增长,快速、准确地从视频或录像中识别出移动车辆的信息并进行跟踪,将有助于优化交通治理方案、缓解交通拥堵现象,并为抓捕犯罪逃逸车辆提供技术支持。因此,研究针对移动车辆的检测方法具有重大意义。
目前移动车辆目标检测主要是基于视频检测,采用计算机视觉和图像处理技术对视频进行处理,从而筛选得到有用的移动车辆信息。常见的移动车辆检测算法有:背景减法、光流法、帧差法,实践中各方法都存在其优点和不足之处。例如,背景减法对周围环境因素如多光源、阴影、噪声变化比较敏感,检测误差较大;光流法不适用于摄像机静止不动的场景;帧差法检测目标速度过快和过慢时会产生较大误差。池利阳、李民政、吴新强提出了一种运动目标检测实时性和鲁棒性的方法,针对二帧差法和背景差法各自的不足提出建立在这两种方法基础之上改进算法,在一定程度上提高了运动目标检测率[1]。於正强、潘赟、宦若虹提出了一种结合帧差法和混合高斯的运动检测算法,该方法缓解了相邻帧差法产生的空洞问题,也消除背景物体突然转为运动物体后产生的"影子"问题[2],相对于相邻帧差法,三帧差分法具有受周围环境影响小,检测率高的优点。为此徐卫星、王兰英、李秀娟提出一种基于OpenCV实现的三帧差分运动目标检测算法研究,利用OpenCV函数库进行实验仿真,并与基本帧间差分算法进行对比分析,实验结果表明该算法准确率高,运算速度快,能满足实时要求[3]。鉴于此本文提出了基于HALCON实现的三帧差分运动目标检测算法研究。图像处理软件HALCON是德国MVtec公司开发的机器视觉软件,具有强大的几何以及图像计算功能。HALCON支持使用GPU进行机器视觉处理的算子超过75个,多于其他任何软件开发包,具有稳定性高、运行时间短和实时性高的优点,非常适合用于移动车辆目标自动识别系统。在HALCON平台的基础上,本文结合了相邻帧差法[4-5]来实现移动车辆目标检测,通过对相邻三帧图像两两作差,并对差分图像二值化后作“与”运算,得到三帧差图像,最后设定合适的阈值,利用几何特征进行移动目标的筛选。与传统背景减法、光流法的仿真结果相比较,本文的方法适用于多个移动目标的场景,且极大地提高了移动车辆目标检测率。
1 移动车辆目标检测系统
基于HALCON图像处理软件,本文设计了移动车辆目标自动识别系统,用于实现视频中移动车辆的检测、识别,系统主要包括以下几块内容:
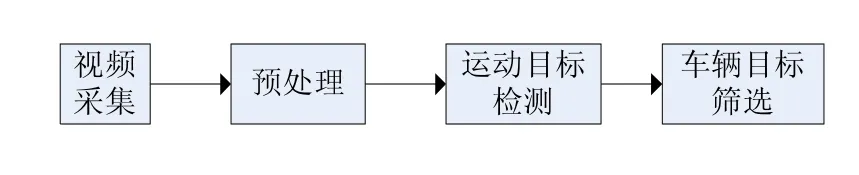
图1 移动车辆目标自动识别系统流程图
视频采集:获取视频图像,导入HALCON软件。
预处理:为提高最终检测结果的准确率,需减少视频中噪声的干扰,本系统使用中值滤波法去除噪声,能在较好的去噪效果下,更多的保留原图像的细节特征。
运动目标检测:基于帧差法,对相邻三帧图像两两作差后,再作“与”运算,得到三帧差。设定合理阈值,对三帧差图像进行处理。
车辆目标筛选:结合车辆几何特征,筛选出移动车辆目标。
2 算法原理
2.1帧差法原理
常用的帧差法是相邻两帧间差分法,将相邻的两帧视频图像相减,在作差得到的帧差图像中,噪声和运动区域存在明显差别,这样可以设定一个阈值,则差分结果大于阈值的像素点就是运动目标。帧差法计算量小、实时性高,是目标检查领域的常用方法。
对于含运动目标的视频图像,假设相邻两帧分别为第k帧和第k-1帧,像素值分别为fk(x,y)和fk-1(x,y),首先对第k帧和第k-1帧使用中值滤波做平滑去噪处理,再取帧差,用第k帧像素值fk(x,y)减去k-1帧像素值fk-1(x,y),得到二值图像D(x,y),计算公式为:

在该式中,T为阈值,需根据实际场景设置合适的大小,T值的大小直接决定着边缘定位的精度和边缘的连续性。若T值选取过大,则某些移动较慢的车辆将难以被检测到,出现“漏检”情况;若T值选取过小,则会检测出图像噪声,出现“多检”现象,影响结果的准确性。
2.2三帧差法原理
对相邻两帧图像作帧差法,容易出现“多检”或“漏检”的情况,且只适用于匀速行驶的车辆识别,而对做加速运动或减速运动的车辆,检测的误差较大,为了提高准确率,本文提出了三帧差法。
三帧差法的原理是基于时间做差分并且阈值化像素,从连续的图像序列中相邻三帧间来提取图像中的运动区域。先对视频中相邻的三帧图像进行平滑去噪处理,,然后对相邻两帧的像素值相减得到两个差分图像,对差分图像进行二值化,即转化为灰度图像。最后对两个差分图像作“与”运算,得到三帧差图像。
假设相邻三帧分别为第k+1帧、第k帧和第k-1帧,像素值分别为fk+1(x,y)、fk(x,y)和fk-1(x,y),先用第k+1帧像素值fk+1(x,y)减去第k帧像素值fk(x,y),第k帧像素值fk(x,y)减去第k-1帧像素值fk-1(x,y),分别得到二值图像和如下:
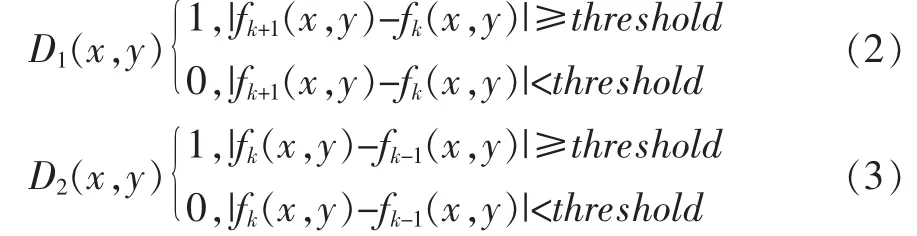

其中,k的选取需循环多次以遍历整个图像,threshold为阈值,需根据应用场景选取合适的大小。具体阈值的选取,还与摄像头和移动车辆的距离有关,需要利用透视关系对图像作进一步处理,并结合经验选取。在周围环境亮度变化不大的情况下,若对应的三帧差小于事先设定的阈值,则这张差分图像为背景图像;若对应的三帧差大于事先设定的阈值,说明图像区域中像素值变化较大,并且可以认为这种变化是图像中的运动物体造成的,则判定该图像为运动车辆。
再对和作“与”运算,得到三帧差图像如式(4)。
2.3目标筛选原理
三帧差法检测结果完整、检测准确率高,且对于含运动物体的视频检测有较强的适应性。经过三帧差法得到运动物体的图像后,可以利用区域标记等方法对其进行标记,进而确定运动物体在图像中的具体位置。结合车辆的几何特征,最终可以获得移动目标车辆的图像,完成移动目标车辆的识别。
3 实验结果仿真
实验仿真在HALCON软件平台下进行,实验仿真运用帧差法对视频中移动车辆目标进行检测。首先对图片进行二值化并将视频的每一帧拆分出来,最终分为588帧。设置好视频图像在HALCON软件图形窗口中显示的参数,这次仿真我们设置窗口图像的长宽高分别为35、344、276。首先利用HALCON中的算子read_image()读入相邻图像,利用算子dyn_threshold()算子分别对前两帧图像作差和后两帧图像作差,进行阈值分割,其中设置分割阈值为45,分割后的图像分别如图2、3所示。
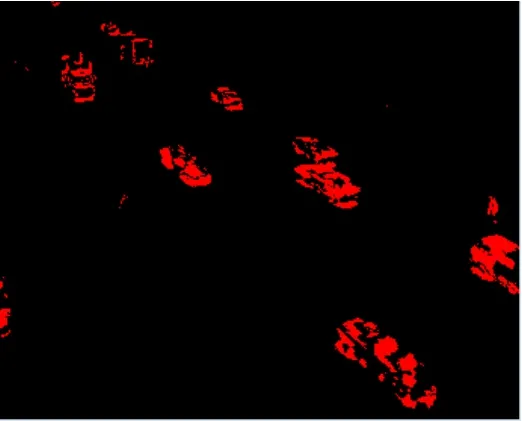
图2 前两帧阈值分割结果

图3 后两帧阈值分割结果
利用算子intersection()取分割后的两张图像之间第三帧与第二帧差分图像和第二帧与第一帧差分图像2个区域之间的交集,实验结果如图4,与运用三帧差法算法分割阈值图像相比传统相邻帧差法阈值分割图像如图5所示。
接着利用算子opening_circle()对交集图像进行开运算[8]操作,其中设置膨胀半径为0.5,其实验结果如图6所示。在对交集图像进行开运算操作基础上再对图像利用算子closing_circle()进行闭运算,其中设置腐蚀半径为3.5,其实验结果如图7所示。

图4 三帧差法阈值分割结果

图5 二帧差法阈值分割结果

图6 对图像开运算处理
利用算子connection()合并所有选定像素触摸相互连通区,并利用算子select_shape()筛选带有某些特征的区域,实验结果如图8所示。
其次利用算子shape_trans()变换一个区域的形状,把difference得到的灰黑色图案变换形状,用convex模式变换,将其变换成整个凸出的填充完整形状,并通过算子dev_display()在现有图形窗口中显示图像目标,实验结果如图9所示。
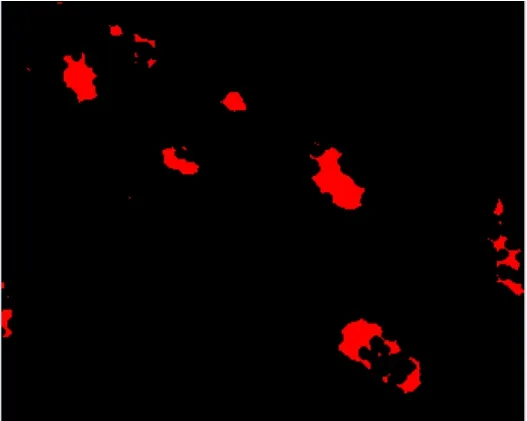
图7 对图像闭运算处理
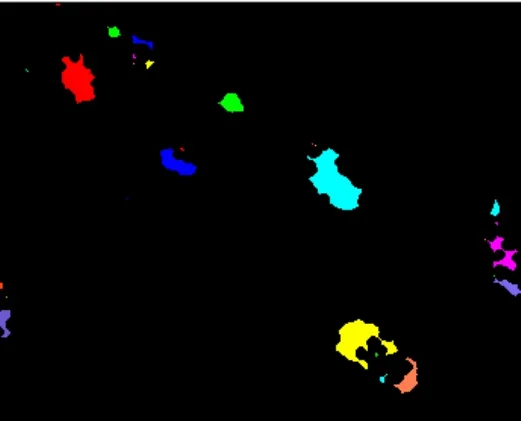
图8 几何特征筛选

图9 运动目标检测实现
最后按照上述操作流程选取下两组相邻帧进行三帧差法运动目标检测,从而勾勒出类似目标的轮廓,最终通过每张图像的集成形成一段完整的运动情况,从而完成该段视频中移动车辆目标地检测。为同时采用人工数车作为参考标准来计算系统的检测率。实验结果最高检测率高达93%,统计表如表1所示。为与传统相邻帧差法形成对比,本文同时对传统相邻帧差法进行实验仿真,仿真结果显示传统相邻帧差法检测率只有43%,统计表如表1所示,实验仿真总体的结果较为理想。

表1 两种算法效果比较
4 结语
为了实现移动目标车辆的自动识别,本文结合HALCON图像处理软件,提出了一种基于三帧差法的方法。对相邻三帧图像两两作差,并对两个差值图像作“与”运算,选取合适的阈值实现移动目标检测,最后结合车辆的几何特征对移动目标进行筛选,得到移动车辆的图像。仿真结果表明,该方法适用于移动目标检测,检测准确率高,且对周围环境有较强的自适应性。该方法同时可以作为车流量[9]和车速等交通流参数精度的一个参考,这也是本文的下一步努力方向。
[1]池利阳,李民政,吴新强.一种运动目标检测实时性和鲁棒性的方法[J].计算机应用与软件,2015(2):132-134.
[2]於正强,潘赟,宦若虹.一种结合帧差法和混合高斯的运动检测算法[J].计算机应用与软件,2015(4):129-132.
[3]徐卫星,王兰英,李秀娟.一种基于OpenCV实现的三帧差分运动目标检测算法研究[J].计算机与数字工程,2011,39(11):141-144.
[4]万缨,韩毅,卢汉清.运动目标检测算法的探讨[J].计算机仿真,2006,23(10):221-226.
[5]Migliore D A,Matteucci M,Naccari M.A Revaluation of Frame Difference in Fast and Robust Motion Detection[C].Proceedings of the 4th ACM International Workshop on Video Surveillance and Sensor Networks,New York:ACM,2006:215-218.
[6]Serra J,Vincent L.An Overview of Morphological Filtering.International Archives of Circuits Systems Signal Process,1992,2(1):47-108.
[7]高美凤,刘娣.分块帧差和背景差相融合的运动目标检测[J].计算机应用研究,2013,30(1):299-302.
[8]李朝锋,潘婷婷.基于形态学开闭运算和梯度优化的分水岭算法的目标检测方法[J].计算机应用研究,2009,26(4):1593-1594.
[9]罗欣,朱清新.改进的基于边缘检测技术的车流量统计系统[J].计算机工程,2006,32(9):228-229.
BAO Lan-hui,CAI Jing
(Department of Forensic Science,Zhejiang Police College,Hangzhou 310053)
In order to identify the moving vehicles fast and accurately,proposes a method of identification of moving vehicle based on HALCON.According to the principle of frame difference method,makes the difference between the current frame image with both previous frame image and next frame image,uses the“and”operation on these two differences,then detects the moving target by setting the segmentation threshold,and the moving vehicle can be found by the geometrical features of target area.The experiment results show that the proposed method has high detection accuracy,and suitable for multiple moving targets detection scene.
HALCON;Target Detection;Frame Subtraction;Three Frame Subtraction
1007-1423(2016)26-0070-05DOI:10.3969/j.issn.1007-1423.2016.26.017
鲍岚辉(1996-),男,浙江丽水人,本科,研究方向为视频图像处理
2016-07-07
2016-09-10Research on Moving Vehicle Detection Method Based on HALCON
蔡竞(1985-),男,浙江杭州人,博士研究生,讲师,研究方向为计算机视觉和视频侦查技术
猜你喜欢
数学杂志(2022年5期)2022-12-02
湘潭大学自然科学学报(2022年2期)2022-07-28
建材发展导向(2021年19期)2021-12-06
新世纪智能(数学备考)(2021年5期)2021-07-28
临床骨科杂志(2020年1期)2020-12-12
中学物理·高中(2016年12期)2017-04-22
新高考·高二数学(2015年11期)2015-12-23
新高考·高二数学(2015年7期)2015-10-22
太空探索(2014年1期)2014-07-10
