粒子滤波在自主天文导航系统中的性能评估和应用
2016-10-20 03:40:59汪梁赵方方陈翠桥徐照钱
深空探测学报 2016年3期
汪梁,赵方方,陈翠桥,徐照钱
(1. 电子科技大学自动化学院 机器人研究中心,四川 成都 611731;2. 电子科技大学计算机学院 机器人研究中心,四川 成都 611731)
粒子滤波在自主天文导航系统中的性能评估和应用
汪梁1,赵方方2,陈翠桥2,徐照钱2
(1. 电子科技大学自动化学院 机器人研究中心,四川 成都 611731;2. 电子科技大学计算机学院 机器人研究中心,四川 成都 611731)
针对深空天文自主导航系统性能的评估,提出采用效用函数模型进行评估。这里以MATLAB为仿真平台,以深空探测为仿真背景、地火转移轨道为模型,采用天文测角自主导航,尝试提出一种有效的评估方法,同时将几种常见的粒子滤波算法应用于此模型中,通过数值和图形界面的形式显示不同滤波算法对导航性能的效用,结果表明该评估方法可有效反映和评估不同滤波算法的性能。
评估方法;粒子滤波;深空探测;自主导航
引用格式:汪梁,赵方方,陈翠桥,等. 粒子滤波在自主天文导航系统中的性能评估和应用[J]. 深空探测学报,2016,3(3):246-252.
Reference format: Wang L,Zhao F F,Chen C Q,et al. Performance evaluation and application of particle filter in autonomous celestial navigation system,2016,3(3):246-252.
0 引 言
深空探测自主天文导航评估系统是目前航天领域重点研究方向。由于深空探测有利于进一步加深对地球、太阳系以及宇宙起源和演变的认识,从现实角度上,深空探测也具有战略性的经济和政治利益。经过50多年的发展,卫星导航、惯性导航系统走向成熟,并各自具有完备的评估体系,而深空探测自主天文导航系统由于技术难度大、探索经验少,相应的评估系统鲜有补充完善。因此,建立一套能有效评估深空探测自主天文导航系统的方法成为了眼下航天领域的热门问题。深空环境未知因素多且复杂,要求探测器的导航系统能实时根据当前位置和环境进行轨道控制、姿态调整及目标跟踪。其中导航滤波技术是实现高精度自主导航的关键技术[1],实现高精度、高时效的自主导航,在导航性能评估方面对自主导航滤波算法的精度和实时性提出了较高的要求。一般来说,自主导航系统的设计和评估总是同时进行的。一方面,通过评估可以检验导航系统功能和性能是否达到设计要求;另一方面,可以对系统以后的工作状态进行监测,为系统后续发展提供改善或增强系统性能的依据。针对上述深空探测的研究背景,本文将重心放在导航系统评估方法的建立以及非线性滤波方法在导航系统中的应用上,通过MATLAB仿真平台,以天文自主导航系统作为测试系统并建立相应量测方程,将不同滤波方法加入到该自主导航系统中,利用滤波后的导航信息与仿真导航信息进行对比和评估,分析不同滤波算法对导航性能的影响。
1 评估指标设计
性能表征系统提供服务或者执行任务的能力。通过一定的方式,该能力可得以量化并被测量。而一个导航系统的能力就是为用户或探测器提供导航和定位服务。以往,定位和导航是两个不同的概念,定位以高精度、静态观测和事后处理为主要特征,而导航则以低精度、动态测量和实时处理为主要特征。在深空探测中,由于飞行距离远,导航系统的任何一个微小的误差都可能通过积累而发散,故在导航精度上提出了较高的要求。深空探测导航系统要求根据物体实时位置提供导航服务,因此导航定位的数据更新速率又需与飞行器的飞行速度相适应才能实现导航服务。此外,由于深空环境复杂,选取不同的导航方式,还会存在导航服务是否可用的问题。综上,为了保证深空探测任务的进行,需对一个导航系统在精度 、可用性、连续性、实时性等指标[2-3]上建立评估方法。
1.1精度评估指标设计
导航精度是导航系统的基本指标之一,它描述了导航系统为运载体提供的实时位置与运载体真实位置之间误差的离散和密集程度。误差的产生一般由测量仪器的不精确、观测者的主观误差和外界环境的随机噪声引起,有时还包含数据处理中有效数字截取带来的舍入误差。由于误差离散程度时好时坏,我们可以从统计的方法加以描述,即认为导航系统的精度在一定置信区间内误差不会超过某一阈值。通常我们采用均方根误差(数理统计中的标准差)的3倍作为限值,其统计概率值为99.7%。
当目标真实位置已知时(利用第三方提供的更高精度信息或者软件仿真提供的真值结果),我们可直接通过导航位置与真实位置做差的形式对精度进行评估,这种方式称为外符合检核。与此对应,当目标真实位置未知时,我们并不知道最佳估计值与真值之间距离多远,这时我们采用多次测量的数学期望作为真值,对测量结果进行内部一致性评估,这种方式称为内符合检核。
对应于外符合检核和内符合检核,精度又有准确度(accuracy)和精密度(precision)之分,准确度反映了测量值与真值之间的距离,精确度反映了测量值与其平均值之间的距离。
对于一个导航系统,尤其是深空探测的导航来说,进行实验的次数有限,而且需花费大量的财力、物力、人力,我们无法进行大量的实验,也就不能通过多次测量的方法来求得测量值的数学期望,因此本文所提到的精度指的是准确度,即通过仿真的方式来实现外符合检核。同时为了对系统的精度有个量化的估计,我们提出一个局部均方根误差(Local Root Mean Square Error,LRMSE)的概念,它可以用以下公式进行描述。
这里我们针对某次实验数据进行分析,∆代表本次实验的第k个时刻误差,n代表从当前时刻开始最近的n个误差(当n小于k时n取k值,i从0时刻开始)。这里我们假设系统状态为马尔科夫链,即k时刻的局部均方根误差只与k-1时刻的局部均方根误差有关,而令n = 2。与均方差相比,它避免了每个时刻多次求和取平均值的不便,而且每个时刻利用到了局部先验信息,通过对每个采样点误差在某个局部时间段进行积累,得到一个时间段内的误差精度范围和误差的变化趋势,有利于对精度做出一个判断和评价。
在精度评估过程一般都存在噪声,由于局部均方根误差采用的是L2范数,L2范数对残差的加权比较大,某些时刻的噪声甚至可能对结果产生很大的影响,干扰了对精度的评估。针对这种现象,这里提出Huber[4]损失函数法,Huber函数能克服少数几个奇异点对精度评估的影响。Huber函数的一般形式为
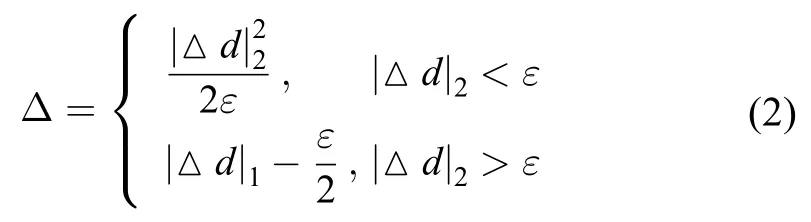
其中:∆d表示真值与估计值之间的残差,|∆d|2表示残差的L2范数;|∆d|1表示残差的L1范数。当误差大于阈值ε时,我们采取了L1范数,由于L1范数对数据的加权最小,因此当数据距离真值较远时,应用L1范数可减小这部分误差的权重。当数据非常准确时,那么观测值距离真值的大小便成了重要的影响因素,这时选择L2范数可放大这部分数值的差异。由于L1范数永远大于L2范数,故式(2)还可改写成
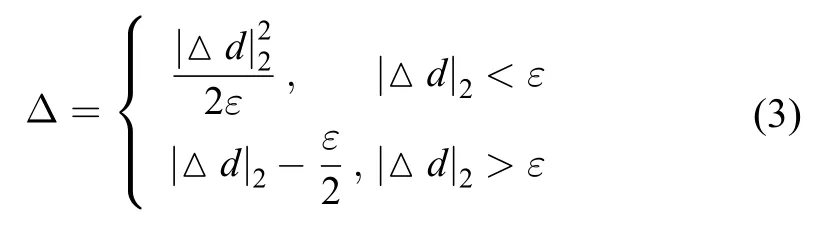
在建立的Huber函数中,ε的选取特别重要,这里我们采用Huber[5]提出的方法,ε取为计算值和观测值误差数列的0.6倍。结合本文的应用环境,前向均方差和Huber函数分别改写为

1.2可用性评估指标设计
可用性是导航系统面向用户的使用性能指标,它定义为系统向探测器提供可靠导航信息的时间比例,是评估方案里的又一基本指标之一,它表征了导航系统可用程度。根据用户的体验,可用性可分为空间信号(Signal in Space,SIS)可用性和服务可用性。空间信号可用性是指观测星体提供观测信息的能力和程度;服务可用性是指接受观测信息后,得到的导航信息误差不超过一定范围,而能正常提供导航服务的能力和程度。造成系统不可用的原因有很多,有的是计划中的,有的是非计划中的,在天文导航系统中,计划中不可用的情况有系统维护和校准,非计划不可用的情况有观测星体丢失、星敏感器故障等。本论文仿真实验中,我们假设所有星体在各自时段内均可被观测捕捉,且不考虑星敏感器故障等偶发事件,只考虑误差过大导致导航不可用的情况。
由可用性的定义可知,可用性表示服务时间可用的比率

其中:K代表可用性;T(total)代表整个导航过程;A(available)代表可用部分。如此若以时间为评价基准,则有

其中:T代表系统运行的总时间;ti表示第i航段满足服务的时间;K为可用性比率。
1.3连续性评估指标设计
导航系统的连续性指的是在一段时间内,导航系统持续提供导航服务而不发生非计划中断的能力。类似的,连续性也分为两个层面:空间信号连续性和服务连续性。空间信号连续性是指观测星体持续提供观测信息而不因星等过高或者超出视野范围而出现观测信号中断或切换观测星体导致观测信号不连续的能力。服务连续性是指接受观测信号后能持续提供导航信息的能力。
根据可靠性的原理,研究一个系统在一定时期发生故障的概率,可通过该系统在任意给定的一个小时内可靠运行的概率来表示,在这段时间内没有发生计划性故障,该连续性概率可用公式表示为

MTBF表示平均故障间隔时间(mean time between failure),分析式(8)可知,MTBF越小,意味着发生故障更加频繁,系统的连续性越差,可靠性也越差。例如一个深空探测器正常运行100小时,则对应的连续性概率为。
1.4实时性评估指标设计
实时性指的是导航系统运算一个周期所需时间的长短或者针对外界环境做出反应所需要的时间。它包含两个方面的含义:第一点主要针对的是算法的复杂度,结合实际情况,导航系统需结合运算速度、功耗、成本等因素,在满足精度条件的基础上,尽可能地在足够短的时间内解算出自己的位置信息;第二点考虑的是导航系统受到偶然随机扰动后快速针对新状态进行导航的能力。在本文中主要以在同等硬件配置下,完成某项算法所花费的时间作为该算法实时性的评估。
2 综合评估设计
为了对整个导航系统提出一个综合的评价,需要综合考虑精度、可用性、连续性、实时性和稳定性几个指标,对导航方法的优良性给出评价。此外,深空探测在巡航段、捕获段不同时段对各指标存在不同的要求,因而还存在着如何分配这些指标权重的问题。下面就解决多指标评估的问题提出剩余效应函数的方法。
当一个决策问题有多套解决方案时,依照决策者的主观愿望和价值倾向,每个方案均对决策者有不同的价值和作用。反映一套方案对决策者价值和作用大小的量值称作效用。而效用函数表示的是一个方案获得的效用与该方案各个指标之间的数量关系。效用分为两种:基数效用和序数效用。基数效用论者认为,效用如同长度,重量可具体衡量并加总求和,效用的度量单位称作效用单位;序数效用论者认为,效用的具体大小是无法具体衡量的,效用的高低只能通过排序、等级来表示。在本文的评估方法中,巡航段、捕获段等不同阶段各指标的重要性有所不同,但是并不能以一个具体量化的数值区分不同指标间的重要性,因而本文采用序数效用分析每个导航算法的好坏。
效用函数具有两个特征:
1)效用函数递增法则。任一指标的提高,都将导致算法最终的效用的提升。也就是说,效用函数是关于各个指标的单调增函数,其各个指标的一阶偏导数大于0,效用函数的切线斜率永远是正的,其数学表达式为

2)边际效应递减法则。边际效用指在某一时间段内任一指标增加一个单位所带来的新增效用,即总效用的增量。边际效用递减即意味着随着单个指标的提高,其效用的增量将变得越来越少,也就是说效用函数关于各个指标的二阶偏导数小于0,数学符号表示为

在上文中我们已给出了导航评估系统所应评价的各个指标以及各指标具体的计算方法。我们还需要提出一个数学模型来反映实际的效用模型,且该数学模型必须完全具备以上两个特征。综上我们采用线性支出型(LES)效用函数作为指标综合评估模型,其效用函数为

在计算各个指标的过程中,可用性x2、连续性x3指标都是越高越好,而精度误差x1、实时性x4却是越低越好。为便于比较,对逆向指标我们进行同向化处理,取,于是效用函数改写为

3 粒子滤波算法及其改进
粒子滤波(Particle Filter,PF)是一类通过随机样本点表示系统状态变量的后验概率分布的递推贝叶斯滤波方法[6-8],在处理非高斯、非线性系统方面具有广泛的应用。而序贯重要性采样为当前应用最广的一类粒子滤波方法,它通过蒙特卡罗方法[9-10],将一批有相应权重的离散随机采样点来近似状态变量的后验概率密度函数,这些采样点即称作粒子,利用这些粒子及它们的加权值来近似估计状态,当样本点足够大时,与最优贝叶斯估计相近。但该方法缺点是存在粒子退化问题,即经过多次迭代之后,粒子的权重出现分化,少数权值大的粒子多次选取而起主导作用,多数权值小粒子对结果影响微乎其微却又占据较多的运算资源。为解决粒子退化问题,目前有两种解决思路,要么选取合适的重要密度函数,要么进行重采样。该两类思路效果各自存在一些问题。由于无法得知后验概率分布,选取合适的重要概率密度函数并不容易实现,而重采样则又带来粒子多样性降低的问题。下面介绍粒子滤波及基于重要密度函数选择的改进粒子滤波算法。
3.1基本粒子滤波
传统粒子滤波步骤归纳如下。

2)更新。更新粒子权值并归一化
3)重采样。采用SIR法(sampling-importance resampling)对粒子进行二次重采样,更新粒子后,每个粒子的权值为。
4)计算粒子滤波值。
3.2扩展卡尔曼粒子滤波
为对非线性系统实现更好的逼近效果,扩展卡尔曼粒子滤波(EKPF)在常规粒子滤波算法的基础上,利用卡尔曼技术[11]在当前估值展开成泰勒级数并对每个粒子进行更新,将得到的后验概率密度作为重要性密度函数,再从重要性密度函数中产生新的粒子,更新权值后进行重采样并计算粒子滤波值。其算法步骤为
1)初始化

2)利用EKF更新粒子

3)利用EKPF对每个粒子进行更新

4)重复式(14)~(17)步骤
3.3无迹粒子滤波
由于EKPF需要对非线性方程进行线性化处理,处理的过程中不可避免地引入了舍入误差。无迹粒子滤波(Unscented Particle Filter,UPF)采用UKF(Unscented Kalman Filter,无损卡尔曼滤液)[12]对每个粒子进行更新并生成重要性密度函数,由于UPF无需计算雅克比矩阵,没有对高阶项的截断误差,在处理严重非线性系统时,能比EKPF获得更高精度。其算法步骤为
1)初始化
2)使用UT变换更新粒子
生成2n+1个sigma点,n为状态向量维数。
计算时间更新方程
计算量测更新方程
3)产生粒子

4)重复式(14)~式(17)步骤
4 实验仿真分析
这里以地火转移轨道为模型,采用自主天文导航方法,选取某3颗小行星作为观测对象,以评估在相同噪声环境下,不同滤波算法对于同一导航系统的性能优劣。我们采用STK(Satellites Tool Kit)导出探测器、小行星、地球、火星在日心坐标系下的1 000个采样时刻的位置数据,并以此作为真值。
4.1指标评估
1)精度评估
从图1我们可以得到3种滤波算法的局部均方根误差范围,其最终值如表1所示。
2)可用性评估
可用性表征的是导航系统提供能够提供导航服务的能力。我们由式(7)计算可得3种粒子滤波算法的可用性大小,如表2所示。
3)连续性评估
一个系统在一定时期发生故障的概率,可通过该系统在任意给定的一个小时内可靠运行的频率来近似表示。按照上述概念我们通过MATLAB仿真求出3种粒子滤波算法的连续性概率,如表3所示。
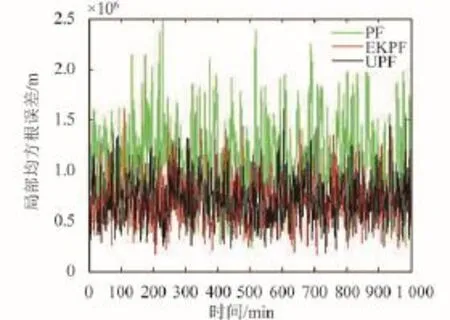
图1 局部均方根误差图Fig.1 Figure of root mean square error

表1 局部均方根误差比较Table 1 Comparison of LRMSE
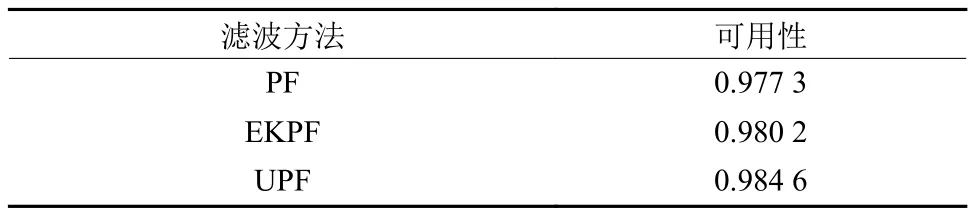
表2 可用性比较Table 2 Comparison of availability
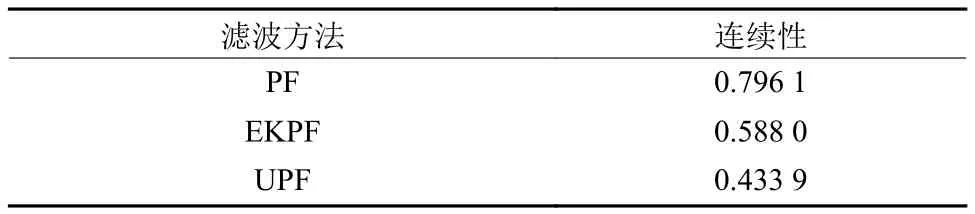
表3 连续性比较Table 3 Comparison of continuity
4)实时性评估
这里记录的是算法的运算速度,由于同一个算法在不同性能的计算机上运算时间可能会有差异,这里的实时性指标仅作不同算法运算速度比较的参考。在仿真中采用1 000个步长,单个步长采样时间为60 s,运行时间如表4所示。粒子滤波算法选取的粒子数越多,运算的变量的维数越多,运算时间也就越长。
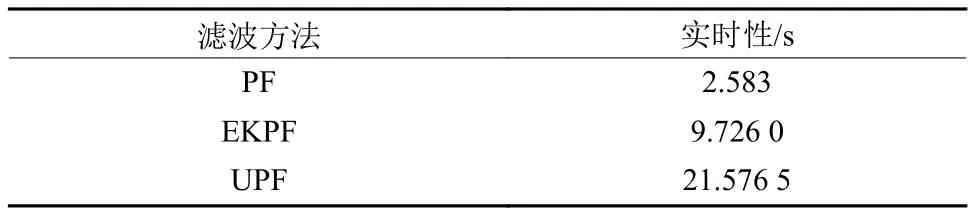
表4 实时性比较Table 4 Comparison of instantaneity
4.2综合评估
在巡航阶段,导航精度I1一直处于首要地位,其次再关注导航的可用性I2、连续性I3和实时性I4。这里我们采用序数效用论,结合AHP法中Saaty(1978)[13]建议的1~9标度法对这4个指标进行重要性排序,并对相应指数分别赋予不同的权重a1=8/15,a2=4/15,a3=2/15,a4=1/15,结合上述公式,我们可计算出PF、EKPF、UPF滤波算法在深空探测自主导航系统中的效用,如表5所示。
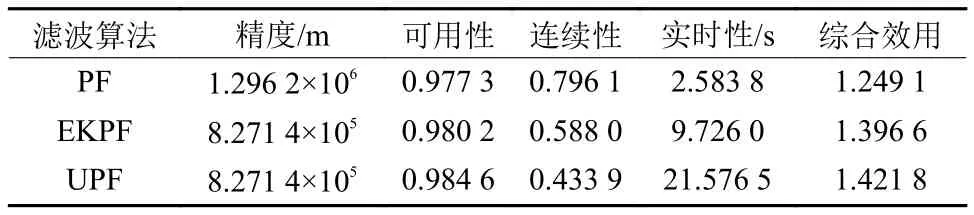
表5 3种粒子滤波算法的综合评估比较Table 5 Comparison of the integrated assessment of three kinds of particle filter algorithm
5 结 论
本文针对不同的粒子滤波算法,研究在同一评估方法中所产生的效用。由于UPF在精度和可用性这两个关键性的指标上具有出色的结果,在最终的综合效用评估上,其影响有较明显的体现。针对UPF粒子滤波实时性方面的短板,随着计算机硬件水平的提高,几种算法实时性上的差异将得到缩小。最后文中给出的仿真案例说明了该评估方法的有效性。
[1]吴伟仁,王大轶,宁晓琳. 深空探测器自主导航原理与技术[M]. 北京:中国宇航出版社,2011. Wu W R,Wang D Y,Ning X L. Principle and technology of autonomous navigation for deep space probe[M]. Beijing:China Astronautic Publishing House,2011.
[2]李作虎. 卫星导航系统性能监测及评估方法研究[D]. 兰州:解放军信息工程大学,2012. Li Z H. Research on monitoring and assessment of satellite navigation system performance[D]. Lanzhou:PLA Information Engineering University,2012.
[3]胡志刚. 北斗卫星导航系统性能评估理论与试验验证[D]. 武汉:武汉大学,2013. Hu Z G. BeiDou navigation satellite system performance assessment theory and experimental verification[D]. Wuhan:Wuhan University,2013.
[4]Huber P. Robust estimation of a location parameter[J]. Annals of Mathematical Statistics,1964,35(2):73-101.
[5]Bube K,Nemeth T. Fast line searches for the robust solution of linear systems in the hybrid L1/L2 and Huber norms[J]. Geophysics,2007,72(2):A13-A17.
[6]Handschin J E,Mayne D Q. Monte Carlo techniques to estimate the conditional expectation in multi-stage non-linear filtering[J].International Journal of Control,1969,9(5) :547-559.
[7]房建成,宁晓琳. 深空探测器自主天文导航方法[M]. 西安:西北工业大学出版社,2010. Fang J C,Ning X L. Autonomous celestial navigation method for deep space probe[M]. Xi'an:Northwestern Polytechnical University Press,2010.
[8]朱志宇. 粒子滤波算法及其应用[M]. 北京:科学出版社,2010. Zhu Z Y. Particle filter algorithm and its application[M]. Beijing:Science Press Ltd. ,2010.
[9]Crisan D,Doucet A. Convergence of sequential Monte Carlo methods[D]. Univ. Cambridge,2000.
[10]Doucet A,de Freitas J,Gordon N. Sequential Monto Carlo methods in practice[M]. New York:Springer,2001.
[11]Kalman R E. A new approach to linear filtering and prediction problems[J]. Journal of Basic Engineering,1960,82(1):35-45.
[12]张瑜,房建成. 基于Unscented卡尔曼滤波器的卫星自主天文导航研究[J]. 宇航学报,2003,24(6):646-650. Zhang Y,Fang J C. Study of the satellite autonomous celestial navigation based on the unscented Kalman filter[J]. Journal of Astronautics,2003,24(6):646-650.
[13]Saaty T L. A scaling method for priorities in hierarchical structures[J]. Journal of Mathematical Psychology,1978,1(1):57-68.
通信地址:电子科技大学计算机学院机器人研究中心(611731)
电话:(028)61830633
E-mail:fangfangzhao.uestc@gmail.com
Performance Evaluation and Application of Particle Filter in Autonomous Celestial Navigation System
WANG Liang1,ZHAO Fangfang2,CHEN Cuiqiao2,XU Zhao qian2
(1. China Robotics Institute, University of Electronic Science and Technology Chengdu Sichuan 611731, China;2. China Robotics Institute, School of Computer University of Electronic Science and Tachnology, Chendu Sichuan 611731, China)
In order to evaluate the performance of the deep space celestial autonomous navigation system,the utility function model is proposed. This paper adopts MATLAB as a simulation platform,deep space exploration as a simulation background,Earth-Mars transfer orbit as a model,and attempts to propose an effective assessment method in Celestial Autonomous Navigation. At the same time,several common non-linear filtering algorithms will be applied in this model,with the way of numerical and graphical display to show the navigation performance effectiveness of different filtering algorithm. The results show that the evaluation method can reflect and evaluate effectively the performance of different filtering algorithm.
evaluation method;particle filter;deep space exploration;autonomous navigation
V448.2
A
2095-7777(2016)03-0246-7
10.15982/j.issn.2095-7777.2016.03.008
赵方方 (1991- ),女,硕士研究生,主要研究方向:计算机应用技术。
[责任编辑:杨晓燕]
2016-05-26;
2016-06-20
国家重点基础研究发展计划(2014CB744206);上海市深空探测技术重点实验室开放课题(DS201504-001)
猜你喜欢
包装工程(2023年24期)2023-12-27 09:18:26
海洋信息技术与应用(2021年1期)2021-06-11 01:20:34
中学生数理化·八年级物理人教版(2020年11期)2020-12-14 06:58:24
少儿美术(2019年7期)2019-12-14 08:06:22
中学生数理化·八年级物理人教版(2018年4期)2018-06-27 08:08:02
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
百科探秘·航空航天(2016年9期)2016-12-01 03:04:14
中国塑料(2016年9期)2016-06-13 03:18:48
河南科技(2015年7期)2015-03-11 16:23:13
现代农业(2015年5期)2015-02-28 18:40:44