
具有未知输入非线性系统的自适应观测器设计
2016-10-18 09:27:40朱芳来李晓航
同济大学学报(自然科学版) 2016年9期
朱芳来, 蒋 鹏, 李晓航
(同济大学 电子与信息工程学院,上海 201804)
具有未知输入非线性系统的自适应观测器设计
朱芳来, 蒋鹏, 李晓航
(同济大学 电子与信息工程学院,上海 201804)
针对具有未知输入和传感器噪声的的非线性系统,讨论了基于T-S(Takagi-Sugeno)模型的未知输入观测器设计方法.首先,给出了基于非线性系统构造T-S模型系数矩阵的计算方法.然后,以T-S模型作为设计模型,通过扩展传感器噪声为辅助状态向量的方式,将系统扩展为增维系统.继而,针对T-S模型,设计模糊自适应观测器以达到对非线性系统状态,未知输入和传感器噪声同时估计之目的.为此,基于线性矩阵不等式,给出了观测器存在的充分性条件.最后,通过实例仿真验证了此方法的有效性.
自适应观测器;T-S模型; 未知输入重构; 传感器噪声重构; 不可测前件变量
在实际的控制系统中,未知输入具有广义的含义,它可以是模型参数的不确定性,可以是系统所受到的外部干扰,也可以是系统的执行器故障信号等.基于这样的原因,未知输入观测器(unknowninputobservers,UIO)设计的研究,具有重要意义和很好的应用前景,如在容错控制、故障诊断与隔离和基于混沌同步的保密通讯等方面的应用,都有很好的应用,因而UIO设计成为控制领域所关注的热点问题之一[1-3].例如,文献[1]针对一类带有未知输入和相应延迟的线性系统,设计了未知输入观测器. 文献[2]对具有未知输入的线性系统,在观测器匹配条件不满足的情况下,设计了降维和高阶滑模观测器来估计系统的状态.文献[3]通过代数矩阵运算的方式,对线性变参数系统设计了未知输入观测器.
T-S模糊模型作为描述复杂非线性系统的有效手段之一,自提出以来,便得到国内外学者的广泛关注.T-S模型有着简单的动态结构,且能以任意的精度逼近任何一个光滑的非线性函数,这使得借用线性系统的设计方法来解决一些非线性问题就成为可能,由于这样的原因,基于T-S模糊模型的观测器设计,成为观测器设计领域中的研究热点之一[4-8].例如,文献[4]针对非线性动态系统,通过一步一步的将高阶滑模观测器扩展为T-S模糊模型方法,提出了一种传感器故障检测与隔离问题的解决方案.文献[5]对动态T-S模糊系统,分析和设计了两种不同的滑模观测器.文献[6]对具有未知多项式输入的T-S模糊系统,设计了自适应观测器来同时估计状态和未知输入.文献[7]研究了离散模糊观测器设计方法,提出了一种新的将非线性矩阵不等式(LMI)条件转化为LMI形式的解耦方法,并将其应用到主动容错控制中.文献[8]针对具有传感器故障的模糊随机系统,设计了鲁棒观测器进行故障估计,同时,基于观测器给出了模糊容错控制方案.值得注意的是,许多现有的工作是建立在可测量前件变量T-S(Takagi-Sugeno)模型的情况下完成的,然而在许多实际情况下,其前件变量是不可测的.目前,在基于T-S模型的观测器设计研究中,对于前件不可测的情况得到了广泛关注,并提出了一些成果[9-11].例如,文献[9]对具有不可测前件变量的T-S模糊系统,设计了未知输入比例积分观测器.文献[10]针对不可测前件变量的T-S模糊系统,采用广义冗余的方法,设计了鲁棒H∞跟踪器.文献[11]基于不可测前件变量设计了观测器,以达到故障诊断的目的.然而从目前已有的研究成果来看,文献[1-3,6]只考虑了未知输入的估计,文献[4,8,11]也只对故障进行诊断,而对同时具有未知输入和传感器故障的观测器设计尚未有报道.因而,基于前件为未知的T-S模型,讨论同时具有未知输入和传感器噪声的未知输入观测器设计,具有重大意义.
本文针对不可测前件变量的T-S模糊系统,在具有未知输入和传感器噪声的情况下,提出一种模糊自适应观测器设计方法来估计非线性系统的状态,同时还给出了未知输入和传感器噪声重构的方法.本文的主要创新点体现在:对不可测前件变量的模糊系统,设计了模糊自适应观测器,并提出了状态、未知输入和传感器噪声同时估计的方法.
1 T-S模型构造
考虑一类非线性系统模型如下:

(1)
其中,x∈Rn,y∈Rp,u∈Rm分别为状态、可测输出和控制输入向量;η∈Rr和ω∈Rw分别是未知输入和传感器噪声.函数φ为非线性项.B∈Rn×m,D∈Rn×r,C∈Rp×n和E∈Rp×w为相应维数的矩阵.假设矩阵D和E列满秩.
假设1:函数φ是连续可微的,φ(0)=0.
考虑T-S模糊模型如下:

则:

(2)
式中:Ai∈Rn×n,Bi∈Rn×m是第i个局部模型具有相应维数的矩阵,而
式(2)中具体参数矩阵可由文献[12]提出的方法得到,对任意状态x(j),j=1,…,N,N是局部线性模型的个数,求出Aj和Bj,满足:
(3)

(4)
根据泰勒公式展开式(4)并忽略高阶项,则:
(5)
(6)
根据文献[13]给出的方法求解式(6),则对x(j)≠0,有
定义Dφ(x(j))为φ在x=x(j)出的雅克比矩阵,非线性系统(1)可转化为

其中
(7)
命题1根据假设1,对于任意的εφ>0,存在带有模糊权值hi(·)的T-S模糊系统(2),可近似地描述系统(1),其近似误差为
证明因为矩阵B,C,D,E是常数矩阵,所以这是对文献[14]中证明的简单扩展.
引理1给定一个标量δ>0.对任意的向量α和β,有:
注1隶属度函数通常是非线性的,且依赖于前件变量的选取.对于系统而言,如果前件变量只包含{u(t),y(t)},则前件变量是可测的;如果包含系统状态x(t),则是不可测的.本文讨论的前件变量取为z(t)=x(t),即前件变量是不可测的情形.
本文的主要目的,是以T-S模型(2)为设计模型,设计自适应观测器,来估计原非线性系统(1)的状态,同时给出未知输入和传感器噪声的重构方法.为后续阐述方便,在不引起歧义的情况下将变量进行简写,如Γ(t)写成Γ.
2 自适应观测器设计
(8)
如果系统(8)存在自适应观测器,就可以同时估计出x和ω.下面将设计一个自适应观测器来同时估计x,ω和η.
对于系统(8),设计自适应观测器如下:
(9)
注2式(9)通过自适应调节律实现了未知输入η的在线跟踪,所以称式(9)所设计的观测器为自适应观测器.与文献[15]中的方法相比,本文式(9)中的第4个方程对未知输入的估计,只用到了输出误差的信息,而文献[15],用到了输出误差的导数.
引理2存在两个矩阵G∈R(n+w)×n和F∈R(n+w)×p满足:
(10)
证明式(10)可等效为
(11)

存在.于是式(11)存在关于矩阵G和F的解,它们的一个解为
(12)
所以误差动态系统可描述为


(13)
则误差方程可被描述为
(14)
此外,如果令Hi=Li+NiF,则式(13)可等效描述为
(15)
同理
(16)
注3故障可分为常数和缓时变故障.例如,在现实系统中,硬件突然遭到破坏或者出现大的偏差,就可以称之为常数故障;由于组件磨损和老化而导致的执行器性能的缓慢下降,可作为缓时变故障.因而,对于常数故障的检测和重构,具有重大意义.
根据假设3和式(9)的第4个方程,未知输入估计误差动态方程为
(17)

(18)

定理1针对系统(8),对于给定的正的标量β和ε1,如果对正定矩阵P∈R(n+w+r)×(n+w+r)和矩阵Xi∈R(n+w+r)×p使如下的线性矩阵不等

(19)
通过引理1和假设2,且β>0,即可以得出:
所以

其中


观测器(9)的未知矩阵Ni,Li,G,F和Φi的计算方法总结如下:
步骤1:通过式(12)计算出矩阵G和F.


步骤4:通过式(15)和式(16),计算出矩阵Ni,和Li.
3 仿真
考虑一个由直流电机驱动的倒立摆[16-17],如图1所示.其基本控制输入方程为


图1 倒立摆
通过文中第1部分提到的方法,系统可转化为局部线性系统,如下:
取两个平衡点为
则
通过求解线性矩阵不等式(LMI)式(19)得到:
通过式(15)和式(16)可得:
根据设计的观测器得到系统的状态估计,如图2所示.由误差曲线图3可知,其是渐近收敛的.图4对传感器噪声进行了重构,图5则对未知输入进行了重构.由图2—5可知,系统的状态、传感器噪声和未知输入重构是令人满意的.

a x1
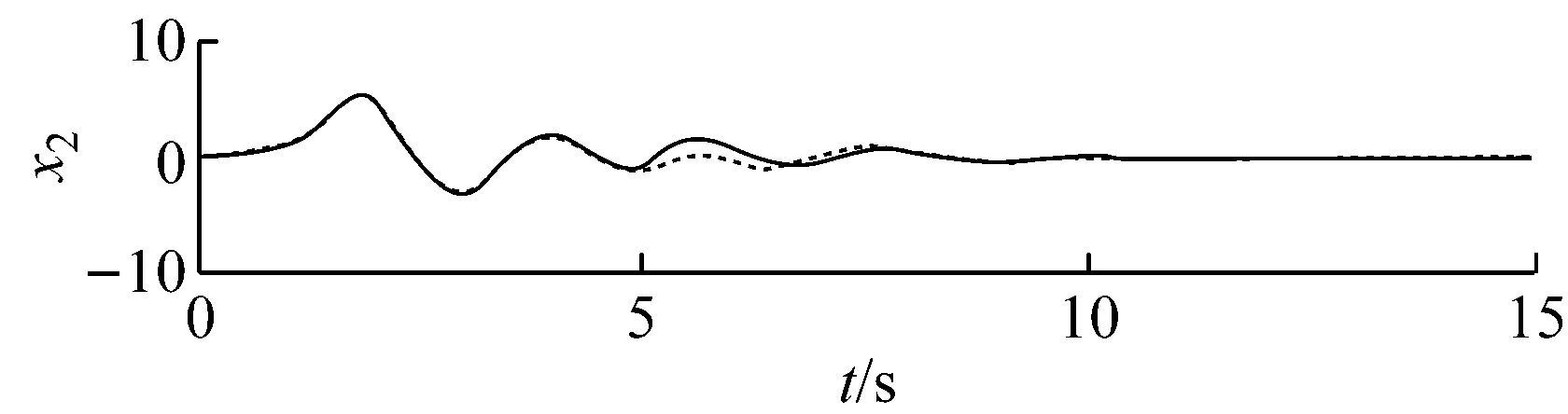
b x2
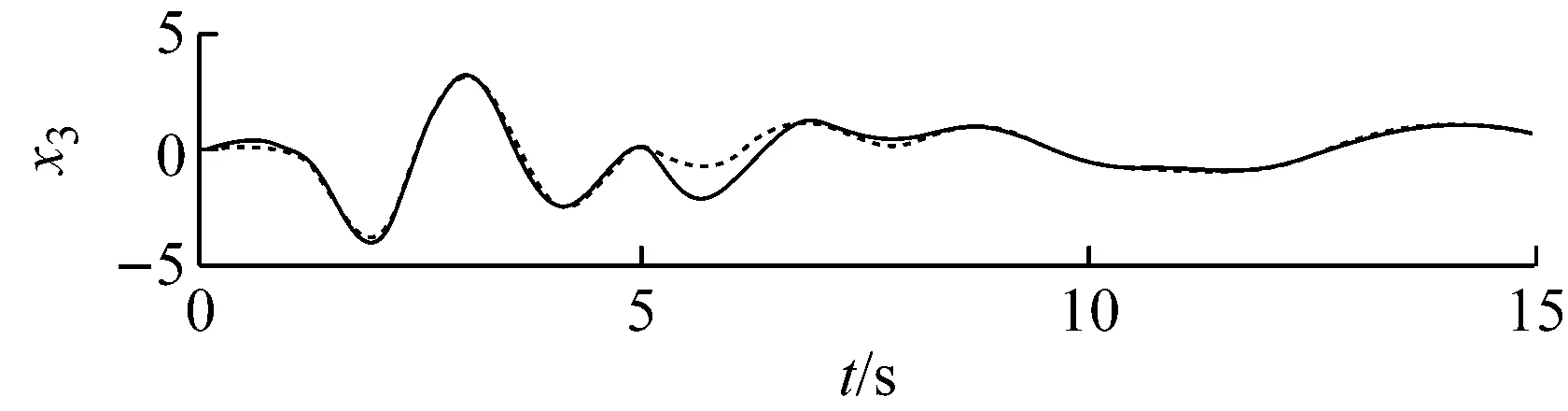
c x3
图2状态估计
Fig.2Stateestimation

a x1

b x2
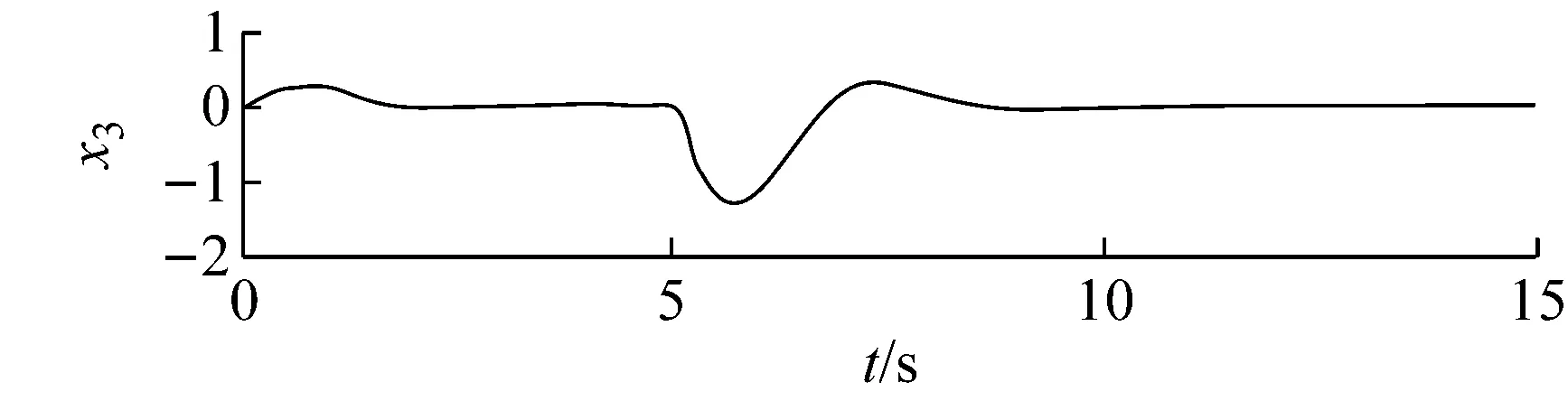
c x3

图4 传感器噪声重构Fig.4 Measurement noise reconstruction

图5 未知输入重构Fig.5 Unknown input reconstruction
4 结论
本文基于不可测前件变量的T-S模糊模型,对非线性系统提出了一种自适应未知输入观测器设计的方法,达到了对非线性系统状态,未知输入和传感器噪声同时估计之目的.通过线性矩阵不等式的方式,给出了观测器存在的充分性条件.仿真结果验证了所提出的方法对非线性系统的有效性.
[1]GangZ,FranciscoJB,WilfridP, et al.Unknowninputobserverforlineartime-delaysystems[J].Automatica, 2015,61: 35.
[2]ZhuF.Stateestimationandunknowninputreconstructionviabothreduced-orderandhighorderslidingmodeobservers[J].JournalofProcessControl,2012,22(1): 296.
[3]IchalalD.OnUnknownInputObserversforLPVSystems[J].IEEETransactionsonIndustrialElectronics,2015,62(9): 5870.
[4]HaouariFA,DjemaiM,CherkiB.SlidingmodeobserversforT-Sfuzzysystemswithapplicationtosensorfaultestimation[C]∥Control,Engineering&InformationTechnology, 2015 3rdInternationalConferenceon.Tlemcen:IEEE,2015:1-5 .
[5]BergstenP,PalmR,DriankovD.ObserversforTakagi-Sugenofuzzysystems[J].Systems,Man,andCybernetics,PartB:Cybernetics,IEEETransactionson,2002, 32(1): 114.
[6]LendekaZ,LauberbJ,GuerraTM.AdaptiveobserversforTSfuzzysystemswithunknownpolynomialinputs[J].FuzzySetsandSystems,2010,161(15):2043.
[7]TsengCS,ChenBS,LiYF.Robustfuzzyobserver-basedfuzzycontroldesignfornonlinearsystemswithpersistentboundeddisturbances:anoveldecoupledapproach[J].FuzzySetsandSystems,2009, 160(19): 2824.
[8]LiuM,CaoX,ShiP.Faultestimationandtolerantcontrolforfuzzystochasticsystems[J].FuzzySystems,IEEETransactionson,2013, 21(2): 221.
[9]YoussefbT,ChadliaM,KarimiHR.DesignofunknowninputsproportionalintegralobserversforTSfuzzymodels[J].Neurocomputing,2014,123(10):156.
[10]AsemaniMH,MajdVJ.ArobustH-infinity-trackingdesignforuncertainTakagi-Sugenofuzzysystemswithunknownpremisevariablesusingdescriptorredundancyapproach[J].InternationalJournalofSystemsScience,2015,46(16): 2955.
[11]GhorbelH,SouissiM,ChaabaneM, et al.Observerdesignforfaultdiagnosisforthetakagi-sugenomodelwithunmeasurablepremisevariables[C]∥Control&Automation(MED), 2012 20thMediterraneanConferenceon.Barcelona:IEEE,2012:303-308.
[12]TeixeiraM,ZakS.Stabilizingcontrollerdesignforuncertainnonlinearsystemsusingfuzzymodels[J].IEEETransactionsonFuzzySystems,1999,7(2) 133.
[13]ChongE,ZakS.AnIntroductiontoOptimization[M]. 4thed.Beijing:JohnWiley&Sons, 2013.
[14]GaoQ,ZengX,FengG, et al.T-S-fuzzy-model-basedapproximationandcontrollerdesignforgeneralnonlinearsystems[J].IEEETransactionsonSystems,2012,42(4): 1143.
[15]ZhangJ,SwainAK,NguangSK.RobustH∞adaptivedescriptorobserverdesignforfaultestimationofuncertainnonlinearsystems[J].JournaloftheFranklinInstitute,2014, 351(11): 5162.
[16]KawamotoS.Nonlinearcontrolandrigorousstabilityanalysisbasedonfuzzysystemforinvertedpendulum[C]∥FuzzySystems, 1996,ProceedingsoftheFifthIEEEInternationalConferenceon.Neworleans:IEEE,1996: 1427-1432.
[17]KazuoT,TakayukiL,HuaOW.Fuzzyregulatorsandfuzzyobservers:relaxedstabilityconditionsandLMI-baseddesigns[J].IEEETransactionsonFuzzySystems, 1998,6(2): 250.
AdaptiveObserverDesignwithUnknownInputsforNonlinearSystems
ZHUFanglai,JIANGPeng,LIXiaohang
(1.SchoolofElectronicsandInformationEngineering,TongJiUniversity,Shanghai201804,China)
Forthenonlinearsystemswithunknowninputsandmeasurablenoises,thedesignmethodofunknowninputobserverbasedontheT-Smodelisdiscussed.Atfirst,thecalculationmethodofthecoefficientmatrixoftheT-Smodelconstructedbasedonnonlinearsystemispresented.Then,theT-Smodelisusedasthedesignmodel,andthesystemisextendedtoanaugmentedsystembyextendingthemeasurablenoiseasanauxiliarystate.Andthen,fortheT-Smodel,afuzzyadaptiveobserverisdesignedtoachievetheobjectiveofthesimultaneousestimationsofthestates,theunknowninputsandthemeasurablenoisesofthenonlinearsystem.Meanwhile,thesufficientconditionoftheexistenceoftheobserverisgivenbasedonalinearmatrixinequality.Finally,simulationexamplesdemonstratetheeffectivenessofthismethod.
adaptiveobserver;T-Smodel;unknowninputreconstruction;measurementnoisereconstruction;unmeasuredpremisevariables
2015-10-29
国家自然科学基金(61074009).
朱芳来(1965—),男,教授,工学博士,博士生导师;主要研究方向为观测器设计,故障诊断与容错控制等.
E-mail:zhufanglai@tongji.edu.cn
TH317
A
猜你喜欢
小学生学习指导(高年级)(2021年4期)2021-04-29 02:17:10
数学年刊A辑(中文版)(2020年3期)2020-10-27 02:44:16
河北理科教学研究(2020年2期)2020-09-11 06:15:48
中学生数理化·八年级物理人教版(2017年9期)2017-12-20 08:11:30
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
数学年刊A辑(中文版)(2015年2期)2015-10-30 01:56:14
电测与仪表(2015年19期)2015-04-09 11:32:56
噪声与振动控制(2015年4期)2015-01-01 07:08:05
新高考·高二数学(2014年7期)2014-09-18 00:42:02
