
一种单连杆机械臂柔性关节的滑模变结构控制
2016-10-17 09:54安凯王飞飞
现代电子技术 2016年2期
安凯,王飞飞
(山东航天电子技术研究所,山东烟台264003)
一种单连杆机械臂柔性关节的滑模变结构控制
安凯,王飞飞
(山东航天电子技术研究所,山东烟台264003)
研究一种带柔性关节的单连杆机械臂的跟踪控制问题,其中体现关节柔性的是连接单连杆机械臂和驱动电机的两个仿腱线弹簧。利用Lagrange方程导出跟踪控制问题的数学模型,引进滑模变结构控制技术,给出Hurwitz多项式的确定以及滑模控制器的设计方法,并讨论Hurwitz多项式的根对控制效果的影响。将滑模控制器的表示式代入跟踪控制问题的数学模型中,得到状态变量的非线性微分方程组,利用Matlab进行仿真,得到了理想的控制输出效果。
单连杆机械臂;柔性关节;最优滑模跟踪控制;多目标规划
0 引言
由于柔性机械臂具有惯量低、能耗低、模态频率低、质量轻、工作效率高和载荷质量比大等特点,已广泛应用于航空航天、精密加工、坐标测量等领域。然而,柔性机械臂极易产生弹性振动,末端难以精确定位使其控制器的设计面临重大挑战,特别是在路径生成和跟踪的情形。通常此类非线性系统控制器的设计方法是首先通过反馈线性化将机械臂动力学方程化为线性方程[1⁃5],然后利用线性系统的技术设计控制器。但对于柔性机械臂,由于反馈线性化方法在控制器设计过程中不能充分获取非线性系统的动力学特性,因此跟踪误差难以消除。为了设计控制器使机械臂末端精确到达指定位置或跟踪预定的路径,许多研究者引进了微分几何的方法用于对柔性关节的控制。Yim[6],Oh and Lee[7]提出一种基于Backstepping设计的自适应输出反馈控制器,以解决柔性关节参数不确定问题。Moberg等[8]针对三关节机械臂模型,研究了反馈线性化方法的离散时间实现,对不确定模型的快速跟踪问题进行了仿真。Lin等[9]以及Spong[10]等人还将反馈线性化和积分流型技术引入非线性系统的控制中。Tomei[11]和Yeon[12]等人分别利用简单的PD控制和稳健的H∞控制实现了柔性关节的稳健控制。上述控制方法的一个共同的特点是控制器一经确定,在控制过程中不能根据非线性系统的输出进行适时调整,也不能充分获取非线性系统的动力学特性,因此必然产生跟踪误差。
滑模变结构控制作为一种非线性控制方法,与常规控制方法的根本区别在于控制的不连续性。它利用一种特殊的滑模控制方式,强迫系统的状态变量沿着人为规定的状态空间的滑动超平面滑到期望点。当系统状态穿越滑动超平面时,反馈控制的结构将发生变化,迫使系统状态变量回到该滑动超平面。因此滑模变结构控制对非线性系统的动力学特性和外在环境扰动等因素具有一定的适应能力,对系统中存在的不确定性具有极强的鲁棒性。滑模变结构控制系统的动态过程由到达阶段和滑动模态运动阶段构成,只要在到达阶段保证系统状态能趋近并进入滑动模态,就可以保证滑动模态运动阶段的稳定性。机械臂的关节柔性是影响机械臂动态精确度和稳定性的重要因素。虽然在控制器设计中考虑关节的柔性因素能改善系统的综合性能指标,但同时也因为受柔性因素影响控制器设计变得更加复杂。本文针对一种单连杆机械臂柔性关节模型,引入滑模变结构控制方法,以增强控制器对关节柔性导致的系统不确定性及外部扰动的自适应性,保证控制系统的全局渐近稳定性。
1 单连杆柔性关节机械臂模型
单连杆柔性关节机械臂模型如图1所示[13]。单连杆机械臂通过两个仿腱线性弹簧固连在电机上,以产生关节的柔性。电机固定在机械臂的基座上,基座平面与水平面平行。θ表示电机的角位移或连杆偏离竖直方向的角度,α表示柔性关节产生的偏差角度,θ+α表示连杆的实际角度。

图1 单连杆柔性关节机械臂模型
由Euler⁃Lagrange方程,柔性关节机械臂的能量方程为:

式中:


式中,电机的扭矩τ是由加在电枢两端的电压u产生的,它们之间的关系为:

由式(1)的前一个方程得:

由式(1)的后一个方程得:

式(2)和式(3)联立得:
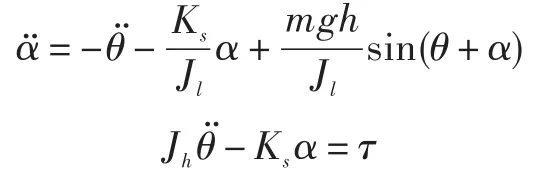

则机械臂的运动方程可表示为:

2 滑模变结构控制
以yd表示理想输出,则跟踪误差为e=yd-y,定义滑模函数为:

式中c1,c2,c3是使多项式λ3+c3λ2+c2λ+c1为Hurwitz多项式的参数。


因此滑动模态s(t)=0是Lyapunov稳定的。
3 滑动模态控制参数的选择
滑动模态s(t)=0的Lyapunov稳定性意味着:

但这并不意味着e→0。由于:

的特征方程为:

根据高阶线性微分方程理论,微分式(5)的解可表示为eλ1t,eλ2t,eλ3t,其中λ1,λ2,λ3是式(6)的根。因此只要λ1,λ2,λ3的实部均为负数,式(4)就意味着e→0。为简单起见可以选择式(6)的根均为负数,甚至全部为重根。比如λ=-λ0(λ0>0)是式(6)的3重根,则式(6)可表示为:


图2 轨迹跟踪(s(t)=e+3+3+)
对比这三幅图可以发现,随着特征根绝对值的增大,输出逼近理想输出的速度逐步提高,逼近过程中的最大偏差也在逐步缩小。需要指出的是尽管式(6)的根-λ0的绝对值越大,与此对应的式(5)中的e收敛于0的速度越快,而且如下的仿真结果也说明了这一点,但选择另外的η>0进行的仿真说明,增大特征式(6)的根-λ0的绝对值,非线性系统的输出y收敛于理想输出yd的速度不一定加快,逼近过程中的最大偏差也不一定会缩小。

图3 轨迹跟踪(s(t)=8e+12+6̈+)

图4 轨迹跟踪(s(t)=27e+27+9̈+)
在如下的仿真中η=27,而且通过另外的仿真可以看出,在s(t)一定时,从η=0.4开始直到η=27输出y收敛于理想输出yd的速度逐步加快,逼近过程中的最大偏差也逐步缩小。
尽管不能得出式(6)的根以及η与收敛逼近过程中的最大偏差的普遍结论,但上述事实至少可以说明:不能一概通过增大特征根绝对值的方法改善逼近效果;特征根以及η的选择既与输出逼近理想输出的速度有关,也与输出逼近理想输出的最大偏差有关,特征根以及η应视实际问题的侧重点作出选择。
4 仿真
为计算方便,假定所有参数为1,理想输出为:

于是在滑模控制之下系统的状态方程为:
于是:
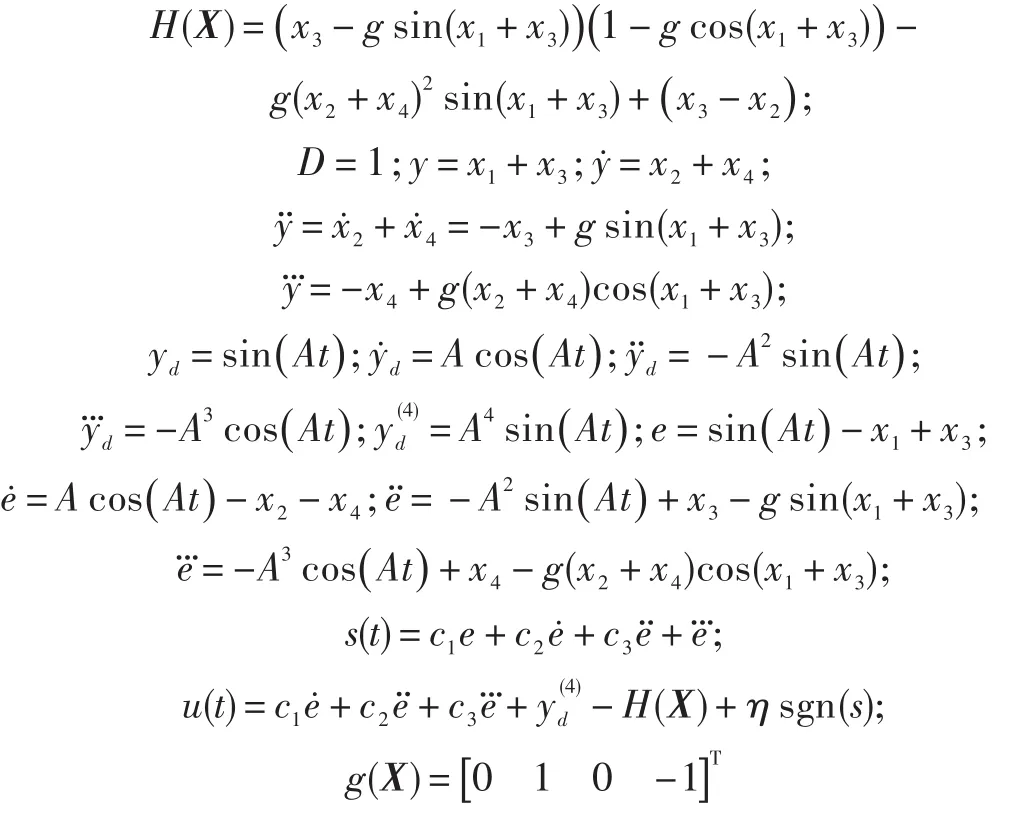

令A=0.1,按照特征方程

的3个重根为-1,-2和-3分别取

构造滑动模态,利用Matlab解微分方程组(7),输出和理想输出依次如图2~图4所示。图5是选择s(t)=27e+27+9̈+时得到的微分方程组(7)的解。

图5 状态变量(s(t)=27e+27+9̈+
5 结语
由于特征方程为:

的根全部为负数是p3+c3p2+c2p+c1为Hurwitz多项式的充分条件,因此多项式:

是Hurwitz多项式。其中λ1,λ2,λ3是任意的三个正数。因此Hurwitz多项式的选择具有相当大的任意性,可以通过λ1,λ2,λ3的选择获得更好的控制效果,比如收敛速度更快以及更小。
利用随机搜索法[14]对参数λ1,λ2,λ3进行随机搜索显然可找到更好的解,但运算量特别大。其实,控制器设计过程中,η>0的选择也与控制效果密切相关。η过大可以缩短过度时间,使收敛速度加快,但同时也容易导致“过调”,使增大[15]。将这样的最优滑模跟踪控制问题转化成一个多目标规划问题,从而直接求出4个待定参数λ1,λ2,λ3和η的值,甚至将微分方程组中变量的个数由4推广到自然数n,直接求出η和(λ+λ1)(λ+λ2)…(λ+λn-1)=λn-1++…+中λ1,λ2,…,λn-1的值是一个需要进一步研究的问题。
[1]BASCETTA L,ROCCO P.Revising the robust⁃control design for rigid robot manipulators[J].IEEE Transactions on Robotics,2010,26(1):180⁃187.
[2]SONG B,MILLS J,LIU Y,et al.Nonlinear dynamic modeling and control of a small⁃scale helicopter[J].International Journal of Control,Automation and Systems,2010,8(3):34⁃543.
[3]CHWA D.Tracking control of differential⁃drive wheeled mobile robots using a backstepping⁃like feedback linearization[J]. IEEE Transactions on Systems,Man and Cybernetics,Part A:Systems and Humans,2010,40(6):1285⁃1295.
[4]ORIOLO G,LUCA A,VENDITTELLI M.WMR control via dy⁃namic feedback linearization:design,implementation,and ex⁃perimental validation[J].IEEE Transactions on Control Sys⁃ tems Technology,2002,10(6):835⁃852.
[5]HYOCHOONG B,JUNG S L,EUN Y J.Nonlinear attitude control for a rigid spacecraft by feedback linearization[J]. KSME International Journal,2004,18(2):203⁃210.
[6]YIM W.Adaptive control of a flexible joint manipulator[C]// Proceedings of IEEE International Robotics&Automation. Seoul,Korea:IEEE,2001:3441⁃3446.
[7]OH J H,LEE J S.Control of flexible joint robot system by backstepping design approach[C]//Proceedings of IEEE Inter⁃national Conference on Robotics&Automation.[S.l.]:IEEE,1997:3435⁃3440.
[8]MOBERG S,HANSSEN S.On feedback linearization for ro⁃bust tracking control of flexible joint robots[J].IFAC Proceedings Volumes(IFAC⁃PapersOnline);2008,17(1):1⁃25.
[9]LIN L C,YUAN K.Control of flexible joint robots via external linearization approach[J].Journal of Robotic Systems,2007,1(1):1⁃22.
[10]SPONG M W,KHORASANI K,KOKOTOVIC P V.An integra manifold approach to the feedback control of flexible joint ro⁃bots[J].IEEE Journal of Robotics and Automation,1987,3(4):291⁃300.
[11]TOMEI P.A simple PD controller for robots with elastic joints [J].IEEE Transactions on Automatic Control,1991,36(10):1208⁃1213.
[12]YEON J S,PARK J H.Practical robust control for flexible joint robot manipulators[C]//Proceedings of IEEE International ConferenceonRoboticandAutomation.Pasadena,CA,USA:IEEE,2008:3377⁃3382.
[13]AHMAD M A,RAMLI M S,RAJA I,et al.The investiga⁃tions of input shaping with optimal state feedback for vibra⁃tion control of a flexible joint manipulator[C]//2009 Con⁃ference on Innovative Technologies in Intelligent Systems and Industrial Applications(CITISIA 2009).Sunway Campus,Malaysia:[s.n.],2009:446⁃451.
[14]安凯,邢进生,邱祖廉.模糊神经网络的二阶段变半径随机搜索算法[J].自动化学报,2000,26(5):616⁃622.
[15]安凯,马佳光,傅承毓.由Z传递函数确定PID控制器参数[J].光电工程,2001,28(6):7⁃9.
Sliding mode variable structure control for flexible joint of single connecting⁃rod mechanical arm
AN Kai,WANG Feifei
(Shandong Aerospace Electro⁃technology Institute,Yantai 264003,China)
Tracking control problem of a single connecting⁃rod mechanical arm with flexible joint based on sliding mode variable structure control is studied.The flexibility of the joint is incarnated by two linear springs in a tendon⁃like fashion.The mathematical model of the tracking control is formulated with Lagrange equations.The technique of sliding mode variable struc⁃ture control is introduced.The methods to choose the coefficients of Hurwitz polynomial and design the sliding mode controller are given.The effect of the roots of the Hurwitz polynomial on the tracking result is discussed in this paper.The controller ex⁃pression is introduced into the mathematical model for the tracking control to obtain a set of nonlinear differential equations of status variable.The ideal control output effect was got by simulation with Matlab.
single connecting⁃rod mechanical arm;flexible joint;optimal sliding mode tracking control;multiple objective programming
TN911⁃34;TP273
A
1004⁃373X(2016)02⁃0004⁃05
10.16652/j.issn.1004⁃373x.2016.02.002
安凯(1957—),研究员,博士后。主要从事光学工程、智能控制和机器人方面的研究。
2015⁃07⁃14
国家重点基础研究发展计划“973”资助(2013CB733000)
猜你喜欢
商用汽车(2021年4期)2021-10-13
装备制造技术(2020年2期)2020-12-14
汽车观察(2019年2期)2019-03-15
中国惯性技术学报(2019年6期)2019-03-04
汽车观察(2018年12期)2018-12-26
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
汽车观察(2018年10期)2018-11-06
汽车实用技术(2017年16期)2017-09-21
机械工程师(2015年10期)2015-02-02
