临近空间高超声速目标跟踪算法研究*
2016-10-17 01:29:42毕红葵
航天电子对抗 2016年4期
李 凡,毕红葵,段 敏,丰 骁
(1.空军预警学院研究生管理大队,湖北 武汉 430019; 2.空军预警学院,湖北 武汉 430019)
临近空间高超声速目标跟踪算法研究*
李凡1,毕红葵2,段敏2,丰骁1
(1.空军预警学院研究生管理大队,湖北 武汉 430019; 2.空军预警学院,湖北 武汉 430019)
针对临近空间高超声速飞行器运动特性,综述了交互多模型算法(IMM)相对单模型算法的优越性。以临近空间飞行器一个机动转弯部分轨迹进行仿真试验,仿真并分析了匀速(CV)、匀加速(CA)、Singer、当前统计(CS)、Jerk模型算法及IMM算法优点及局限性。结果表明,IMM算法跟踪机动目标在机动时稳定性、精度、机动适应性方面优于单模型算法,但存在实时性、模型转换可能性先验确定等问题,并针对这些问题提出可能的解决方法。
IMM算法;临近空间;高超声速目标;运动特性
0 引言
临近空间高超声速飞行器具有飞行高度高、巡航速度快、突防能力强、打击威胁大等特点。美国X-51A、X-43A的试飞成功,对防空预警体系提出重大挑战。开展临近空间高超声速飞行器跟踪算法的技术研究,对防空预警体系建设具有重大的现实意义和军事价值[1-2]。
目标跟踪是雷达数据处理中的核心问题,对目标准确、稳定的跟踪是进行有效拦截的前提。目前对于常规机动目标跟踪研究已趋于成熟,基于单模型如CV、CA、Singer、CS等已有较多文献资料[3],而专门针对临近空间高超声速目标跟踪研究还处于初步阶段。文献[4~5]提出一种IMM跟踪临近空间高超声速目标的思路;文献[6]提出一种基于目标运动状态辩识的DG-VSMM算法提取目标运动特征信息自适应选用模型集;文献[7]通过测量误差变化调整采样间隔,保证一定精度的情况下达到雷达资源优化的目的。本文基于临近空间高超声速目标运动特性,以临近空间高超声速目标一个机动跳跃部分轨迹为对象,对IMM算法与单模型算法跟踪性能进行对比分析,实验结果表明在目标机动时IMM跟踪效果优于单模型。同时,分析了IMM在跟踪临近空间高超声速目标时存在实时性差以及模型转移概率难以确定的问题,并提出新的有潜力的解决方案。
1 轨迹处理
1.1临近空间高超声速飞行器运动特性分析
文献[8]指出临近空间高超声速飞行器飞行轨迹大致可以分为上升段、巡航段和俯冲段三个阶段。上升段发射方式包括火箭地面发射和机载空中发射,推动模式包括单模式(火箭)推动和双模式(火箭加超燃冲压发动机)推动;巡航段包括有动力巡航段和滑翔段,有动力巡航段超燃冲压发动机间歇启动,机动性强,在几万米高空周期跳跃飞行(“蛇形”机动)以保持巡航高度和巡航速度,滑翔段飞行器巡航高度不断降低;由于速度极快,攻角微变会导致攻击落点变化很大。俯冲段为飞行器最终攻击阶段,通过制导攻击目标完成作战任务。全弹道轨迹运动特性复杂多变、有很强的机动能力,单模型有一定的局限性,难以描述其复杂的运动过程,而IMM适应性更广,能够表征以加速度和角速度变化形式出现的机动。
1.2坐标转换
乘波体飞行轨迹为地球直角坐标系,假设观测坐标系为NED坐标系,假定雷达的经度、维度、高度和大地方位角分别为L、B、H、A,则其在地球坐标直角坐标系中的坐标位置为[3]:
(1)


(2)

由此,可得目标相对于雷达的运动状态,受到雷达视距的影响,目标高度从零开始。为方便后续讨论分析,选用二维X-Y平面,不考虑目标在横向上的运动。
2 IMM算法
设系统状态与量测方程为:

(3)

(4)
IMM算法使用多个运动模型算法同时描述目标真实运动模式(模式指目标真是运动状态,区分于模型概念),假设不同模型间转换服从已知的转移概率的马尔科夫链,基于似然函数确定每个模型在滤波结果所占的权值,最终通过加权求和得到滤波输出。可以分为模型状态交互输入、模型可能性计算、模型概率更新以及交互输出4个步骤。
1)模型状态交互输入

(5)

(6)
2)模型可能性计算
(7)

3)模型概率更新
(8)
4)交互输出
(9)
(10)
多个模型通过卡尔曼并行滤波,得到基于不同模型算法的滤波结果参与滤波输出(CV、CA、Singer、CS、Jerk、CT的具体算法公式与步骤参见文献[3])。
3 临近空间高超声速飞行器跟踪算法仿真
IMM算法包含了多个滤波器,其中有多个模型并行工作,目标状态估计是多个滤波器交互作用的结果。为验证IMM算法较单模型算法的优越性,以CV、CA、Singer、CS、Jerk、CT模型算法、IMM(CA、Singer、CS),其中Singer、CS模型最大加速度200m/s2,对某型乘波体飞行器巡航轨迹进行跟踪算法仿真。
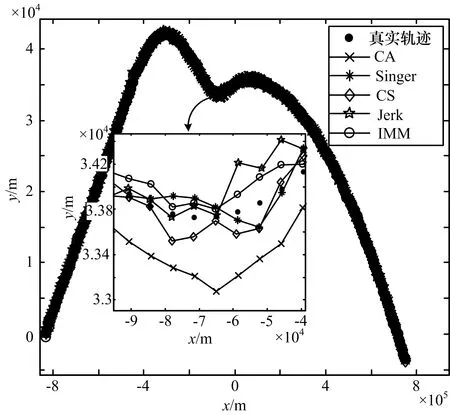
图1 滤波轨迹与真实轨迹比较
由图1可知,几种模型算法基本都可以实现对目标的跟踪,但在目标转弯时刻CA明显偏离程度较大。IMM算法整体位置均方根误差在x方向和y方向都小于其他4种单模型,同时出现的误差突变点较少,跟踪较为稳定,如图2所示。
CA对近似匀速、匀加速的运动跟踪精度较高,但机动适应性不强,在y机动突变时位置均方根误差值升高;Singer对机动介于匀速和匀加速之间的运动适应性较强,在y方向出现机动突变时速度均方根误差明显比CA的小且稳定;CS能较为真实地反映“当前”目标机动范围和强度的变化,但对于目标不发生机动或者机动强度较弱时,跟踪性能下降,“当前”统计加速度出现较大误差;由于目标不是强机动的,Jerk模型受机动频率影响较大,收敛速度慢,对于弱机动目标跟踪精度较低,跟踪效果最差;IMM算法具有较宽的覆盖范围,对目标机动适应性好,能通过模型转移概率调整模型集内各模型比重,使其更加贴近目标实际运动模式,提高了跟踪精度和稳定性。
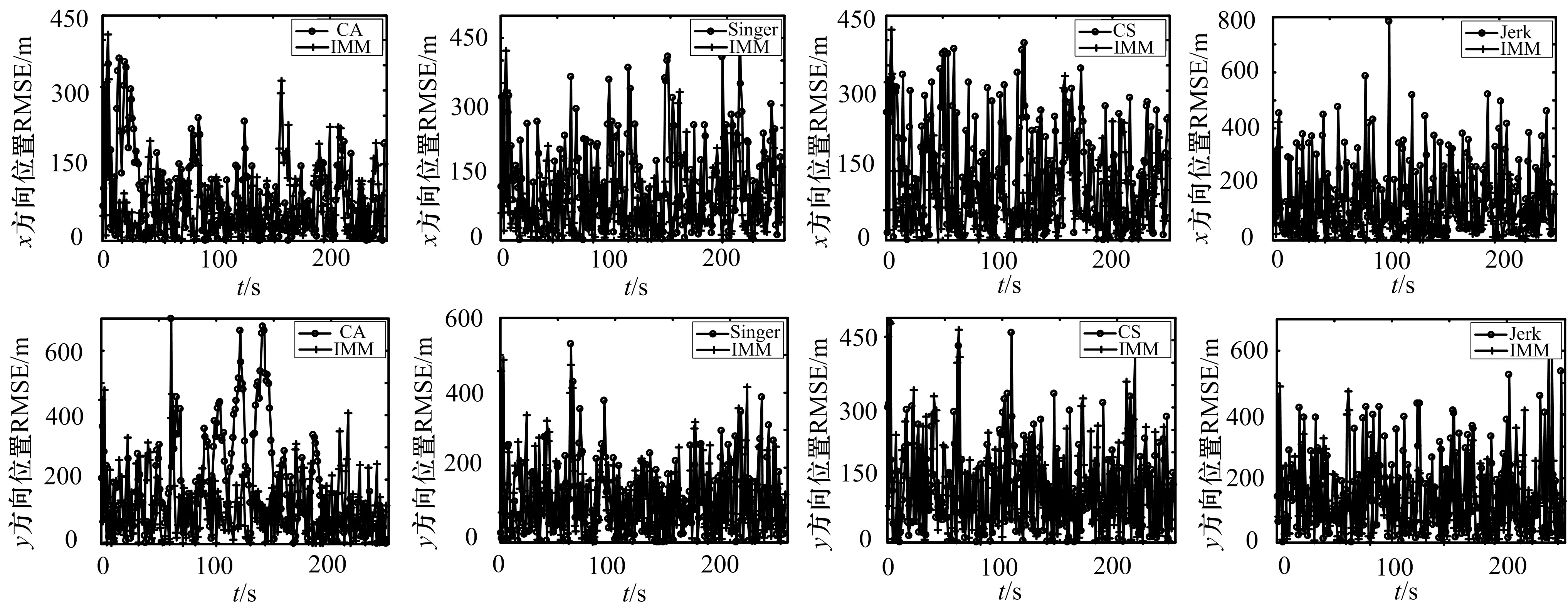
图2 位置误差均方根比较
为了从整体上比较算法的性能,定义以下统计指标:总体均方差(CRES)、相对误差压缩比(CECC)、耗时(T)分别为:
(11)
T=t/M
(13)

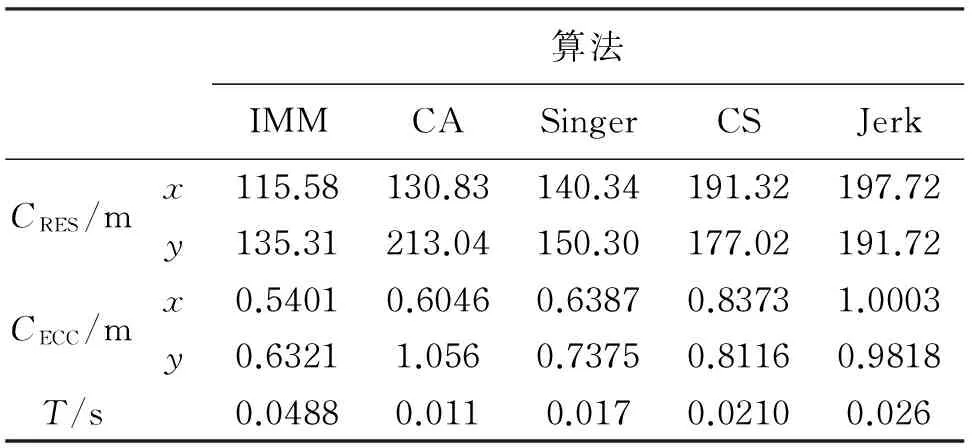
表1 总体性能对比算法
表1中IMM算法总体均方差和相对误差压缩比单模型算法小。在目标机动时,IMM能够调整模型可能性降低滤波误差,但在目标运动模式近似某种单一模型时其跟踪精度比单模型的低,同时IMM耗时高于单模型,IMM需要同时计算多个模型的滤波结果,完成模型概率更新、输出交互等步骤,而传统的单模型计算过程简单,耗时较少。
综上所述,CA计算量小,适合实时跟踪的需要。对于做匀速、匀加速或者近似匀速、匀加速运动的目标,采用CA能达到很高的跟踪精度。Singer具有比CA和CV更宽的覆盖范围,适合描述介于匀速运动与匀加速运动之间的机动行为,但是多个参数基于先验信息,难以有效估计目标强机动时的状态变化。CS能更为真实地反映目标机动范围和强度的变化,是目前较好的实用模型,然而模型对非机动、轻微机动或者机动强度超过其先验条件的情况跟踪精度较低,而且运算量较大。Jerk适合描述强机动,对于弱机动跟踪效果差,收敛速度较慢。上述单模型对环境要求极高,在目标出现机动时会产生较大误差,适应性较差。原因在于模型结构简单、描述的运动模式较为单一,受先验信息影响较大。
IMM算法可以在模型间实现快速、平滑的切换,因此可以适应突发的机动情形,是一种有效的、鲁棒的算法。但是其存在以下几个问题,1)模型转换由转移矩阵决定,通常先验设定,模型转移概率大小难以确定;2)在目标机动时具有较高精度,弱机动或不机动时精度低于单模型;3)使用VSMM在一定程度上可以解决模型竞争激烈的问题,但容易引发模型转换在同类模型“聚焦”;4)实时性较差。
4 结束语
本文介绍了临近空间高超声速飞行器运动特性。基于某型乘波体飞行器巡航段滑翔轨迹,通过100次的Monte-Carlo仿真,对比了CA模型、Singer模型、CS模型和Jerk模型与IMM算法的跟踪效果,从跟踪精度、稳定性方面进行对比分析,综合分析了单模型针对系统运动模式的优点以及局限性,为后期IMM算法模型集的选取提供参考信息。其中使用CUDA提高实时性以及引入随机有限集实现模型转移概率自适应将是下一步研究的重点。■
[1]李志淮,谭贤四,王红,等.临近空间高超声速目标跟踪制导雷达最有波位编排模型[J].光电子激光,2013(4):794-797.
[2]铁鸣,吴旭升,毕敬,等.高超声速飞行器总体性能虚拟飞行试验验证系统[J]. 系统工程与电子技术,2013,35(9):2004-2010.
[3]何友,修建娟,关欣,等.雷达数据处理及应用[M].北京:电子工业出版社,2013.
[4]关欣,赵静,张政超,等.一种可行的高超声速飞行器跟踪算法[J].电讯技术,2011,51(8):80-84.
[5]Seah CE,Hwang I.Algorithm for perfor-mance analysis of the IMM algorithm[J]. IEEE Trans. on Aerospace and Electronic Systems,2011,47(2):1114-1124.
[6]肖松,李志淮,谭贤四,等.临近空间高超声速飞行器DG-VSMM跟踪算法[J].弹道学报,2013,25(2):15-19.
[7]李昌玺,毕红葵,许文杰,等.一种自适应高超声速目标跟踪算法[J].空军预警学院学报,2013,27(1):48-51.
[8]李惠峰.高超声速飞行器制导与控制技术[M].北京:中国宇航出版社,2012.
[9]秦雷,李君龙,周荻.基于AGIMM的临近空间高超声速目标跟踪算法[J].系统工程与电子技术,2015,37(5):1009-1014.
[10]李建江,张磊,李兴钢,等.CUDA构架下的灰度图像匹配算法[J].电子科技大学学报,2012,41(1):110-113.
Research on hypersonic target tracking algorithm in near space
Li Fan1, Bi Hongkui2, Duan Min2, Feng Xiao1
(1.Department of Graduate Management,Air Force Early Warning Academy,Wuhan 430019,Hubei, China; 2.Air Force Early Warning Academy,Wuhan 430019,Hubei,China)
Aiming at the motion characteristics of the hypersonic vehicle in near space, the advantages of the relative single model algorithm is summarized. Simulation experiments are carried out, the characteristics and limitations of CV, CA, Singer, CS, Jerk model algorithm and IMM algorithm in the near space vehicle are analyzed. The results show that the IMM algorithm in tracking maneuvering target in maneuvering stability, precision, maneuvering adaptability is better than the single model algorithm, but there are these problems of real-time characteristics, model conversion prior possibility to determine, and possible solutions are proposed.
IMM algorithm;near space;hypersonic target;movement characteristics
国家自然科学基金青年基金(61401504)
2016-01-11;2016-06-06修回。
李凡(1992-),男,硕士生,主要从事临近空间高超声速目标跟踪算法研究。
TN957
A
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01 06:29:48
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
装备制造技术(2020年3期)2020-12-25 05:21:52
当代陕西(2019年12期)2019-07-12 09:12:02
汉语世界(The World of Chinese)(2019年1期)2019-03-18 01:50:16
小哥白尼(趣味科学)(2018年5期)2018-06-21 06:24:32
电子制作(2018年2期)2018-04-18 07:13:25
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12
小哥白尼·军事科学画报(2014年8期)2015-04-07 03:54:50
太空探索(2014年5期)2014-07-12 09:53:28