基于PCHD模型的VSC-HVDC的无源控制及滑模辅助改进控制
2016-10-14 02:49:32钱甜甜苗世洪刘子文冉晓洪吴英杰
电工技术学报 2016年3期
钱甜甜 苗世洪 刘子文 冉晓洪 吴英杰
(强电磁工程与新技术国家重点实验室(华中科技大学) 武汉 430074)
基于PCHD模型的VSC-HVDC的无源控制及滑模辅助改进控制
钱甜甜苗世洪刘子文冉晓洪吴英杰
(强电磁工程与新技术国家重点实验室(华中科技大学)武汉430074)
无源控制因具有全局稳定性且不存在奇异点,逐渐被应用到基于电压源换流器的高压直流输电(VSC-HVDC)控制中。提出一种设计方法较为简单的基于端口受控耗散哈密顿系统(PCHD)模型的无源控制策略,然后加入辅助滑模控制以提高其鲁棒性。在Matlab/Simulink中的仿真实验表明,所提两种控制策略与优化后的PI控制策略相比,具有较好的动态性和鲁棒性。
柔性直流输电系统无源控制鲁棒性动态性
0 引言
在基于电压源换流器的高压直流输电(Voltage Sourced Converter Based HVDC,VSC-HVDC)工程实际控制中,PI控制器处于主导地位,但是PI控制器在面对系统内部和外部扰动时不能表现出良好的性能。其中最主要的原因是VSC-HVDC是一个复杂的非线性、多输入多输出系统,而传统的PI控制策略是基于线性的。随着非线性控制理论和智能控制理论的发展,已经有很多学者将其应用到VSC-HVDC系统的控制中,例如反馈线性化理论、滑模控制理论、自适应控制理论、神经网络控制理论、模糊控制策略和粒子群优化控制等[1-6]。
近年来,学者们尝试将无源控制理论运用到VSC-HVDC系统的控制中,取得了一些成果。文献[7]根据整流器的功率EL数学模型,利用改进的阻尼注入方法设计无源功率控制器,使整流器具有功率响应快、直流电压稳定性好以及抗负载扰动能力强的优点。文献[8]针对三相电压型PWM整流器设计了一个算法简单且无静差的IDA-PB(Interconnection and Damping Assignment-Passivity Based)控制器,IDA-PB控制是一种基于PCH(Port Control Hamiltonian)系统模型的无源控制方法。文献[9]基于风电接入下VSC-HVDC的欧拉-拉格朗日(Euler-Lagrange,EL)模型,设计了换流器的无源解耦控制器,该控制方法使VSC-HVDC具有更好的动静态性能,使大型风电场柔性直流输电系统具有更强的鲁棒性。文献[10]根据MMC的欧拉-拉格朗日EL模型及无源性,提出了一种新的用阻尼注入方法设计无源控制器,以改善MMC的动静态性能,使MMC具有功率响应快及直流电压稳定性好的优点。
现有针对VSC-HVDC的无源控制分为两类:①基于EL模型,利用反对称矩阵和存储函数简化了控制器的设计;对系统参数变化及外来摄动有较强鲁棒性;系统结构简单,易于实现;具有全局稳定性,无奇异点;②基于PCHD模型,有多种方法设计无源控制器,如IDA-PBC(Interconnection and Damping Assignment-Passivity Based Control)方法,不仅能能量成型,还能阻尼注入和互联矩阵,设计具有灵活性,可设计出更优秀的控制器;同时也有基于EL模型的无源控制器的优点[11]。现有的PBC(Passivity Based Control)控制策略大多是双闭环控制,即内环为电流无源控制策略,用以求得输入控制量;外环为PI控制策略,用以求得内环电流的参考值。这种控制策略与双闭环PI控制策略相比,不会增加控制器的复杂性,而且能更好地改善VSC-HVDC系统的运行性能。
由于无源控制采用的是基于精确参数的模型,在不确定因素下,会对系统的运行平衡点产生影响,进而影响控制器的控制性能,而且现有的基于PCHD模型的控制器,其设计策略较为复杂。
本文提出了一种基于PCHD模型的简便控制策略,并加入了辅助滑模控制,借助其良好的鲁棒性和设计的简便性,改善了系统在一些扰动因素下的运行性能。最后在Matlab/Simulink中,对所提控制策略的有效性进行了对比验证。
1 VSC-HVDC的PCHD模型
1.1d-q坐标下VSC-HVDC的数学模型
VSC-HVDC系统的结构图如图1所示。VSC-HVDC系统一端换流器在a-b-c三相静止坐标系下的数学模型如式(1)所示,假设三相主电路参数完全相同,且整流侧和逆变侧的结构对称,电气参数相同,所有量均采用标幺值表示。


图1 两端三电平VSC-HVDC系统的结构图Fig.1 The structure diagram of three levels VSC-HVDC system

(1)

式(1)做Park变换,得到d-q同步旋转坐标系下的数学模型如式(2)所示。在Matlab中,Park变换的转换矩阵如式(3)所示。
(2)
(3)
式中,Id、Iq分别为VSC-HVDC系统在d-q坐标系下注入到换流站的交流线路电流;Ud、Uq分别为系统换流站在d-q坐标系下的交流电压,Ud=SdUdc,Uq=SqUdc;Usd、Usq分别为系统交流侧在d-q坐标系下的电压;Sd、Sq分别为开关函数的d、q轴分量;RDC为其中—端换流站和直流侧的等效电阻;ω为交流系统的角频率。
1.2PCHD模型下的VSC-HVDC系统
将式(2)转换为PCHD模型下的数学表达式为
(4)
式中
(5)
(6)
u=(UsdUsq)T
(7)
系统的Hamilton能量函数为
(8)
则
(9)
系统的互联矩阵如式(10)所示,且J=-JT。
(10)
阻尼矩阵如式(11)所示,且R=RT≥0。
(11)
输入矩阵为

(12)
2 PCHD模型下的控制算法
(13)
为了将VSC-HVDC系统渐近稳定在期望的平衡点xo附近,构造一个加入反馈控制后的闭环期望能量函数Hd(x),使它在xo处取极小值。寻求反馈控制:u=β(x),使闭环系统为
(14)
式中,Jd、Rd分别为期望的互联和阻尼矩阵,且
(15)
设待定的互联和阻尼矩阵为
Ja=0
(16)
(17)
取闭环系统期望的Hamilton函数为
(18)
推导出相应的控制规律

(19)
(20)
式(19)做变形,可得到VSC-HVDC对应的控制规律
(21)
且可证明
-[Jd(x)-Rd(x)](D-1xo)=
-[Ja(x)-Ra(x)](D-1x)+Gβ(x)
(22)
(23)
3 无源滑模控制
选取滑模面
(24)
则
(25)
根据基于趋近律的滑模控制,令
(26)

(27)
可解出
(28)
联立式(20)和式(27)可得到
(29)
将式(28)代入式(20)中,得到无源滑模控制算法为
(30)

图2 VSC-HVDC的整体控制图Fig.2 Control block diagram of the VSC-HVDC system
4 仿真实验
为了验证所提控制策略的有效性,本文在Matlab/Simulink中进行了仿真实验。选用两端三电平的VSC-HVDC系统,其具体参数如表1所示。且本文采用标幺值进行计算,交流侧和直流侧的基准功率为200 MW,交流侧的基准电压为81.65 kV,直流侧的电压基准值为100 kV。无源控制器和无源滑模控制器的电流内环控制参数为:r1=r2=0.65 (pu), ρ1=ρ2=1 300。 外环PI控制器参数为:P、Q控制端,kp1=4,ki1=5,kp2=4,ki2=5;Udc、Q控制端,kp1=3,ki1=45,kp2=4,ki2=5。为了体现所提控制算法的有效性,本文将VSC-HVDC系统在无源滑模控制、无源控制和双闭环PI控制策略下的运行性能进行了对比分析。为保证对比分析的合理性,3种控制算法的外环PI控制参数选取一致。

表1 两端三电平VSC-HVDC系统的主要参数Tab.1 The main system parameter of three levels VSC-HVDC system
4.1整流侧有功功率阶跃情形下
如图3所示,整流侧有功功率的参考值在2 s时从1 (pu)阶跃为-1 (pu),3.5 s时从-1 (pu)阶跃为1 (pu)。无功功率的参考值在1~5 s都保持为0 (pu)。从3种控制器下的VSC-HVDC运行性能来看,相较于PI控制器,无源滑模控制器和无源控制器均能使系统的有功功率较快较稳地跟踪有功功率参考值。且从图3中可以看出,在PI控制器和无源控制器下,系统的有功功率变化仍会对无功功率产生一定影响。而在无源滑模控制器下,有功功率阶跃带给无功功率的影响非常小。


图3 整流侧有功功率阶跃情形下系统的响应情况Fig.3 The response of VSC-HVDC system when the active power at rectifier side steps
4.2逆变侧交流系统母线单相接地短路
如图4所示,VSC-HVDC系统逆变侧交流母线在2 s时a相接地短路,持续时间为100 ms。从图中可以看出,在无源滑模控制器的作用下,系统的有功和无功功率以及逆变侧交流母线电压的超调量和稳定时间,都较无源控制器和PI控制器下的小。超调量的减少十分重要,因为它可以避免换流器电流的饱和。


图4 逆变侧交流母线单相接地短路情形下系统的 响应情况Fig.4 The response of VSC-HVDC system when there is a single phase earthing-short fault on the AC busbar at inverter side
4.3系统换流变压器和换流站的等效阻抗发生变化
为测试所提控制方法在系统参数变化下的鲁棒性,使系统两端换流变压器和换流站的等效阻抗由原来的0.3 (pu)减少为0.15 (pu),整流站端的有功功率指令为0~2 s、1 (pu),2~4 s、0.5 (pu)。无功功率的参考值在1~4 s都保持为0 (pu)。系统整流侧和逆变侧的有功和无功功率响应分别如图5所示。从图中可以看出,当系统参数变化较大时,加入了辅助滑模控制的无源滑模控制器对于系统参数变化不敏感,但其依然能很好地跟踪功率指令值,且传输的功率比较平稳,鲁棒性最优;无源控制器的鲁棒性能次之;PI控制器,在有功功率指令保持为1 (pu)时,虽然传输的功率仍能保持平稳状态,但传输的有功功率与设定值有4%左右的偏差;当系统的有功功率指令由1 (pu)变为0.5 (pu)时,其阶跃处超调量较大,传输的有功和无功功率都不够稳定,鲁棒性较弱。
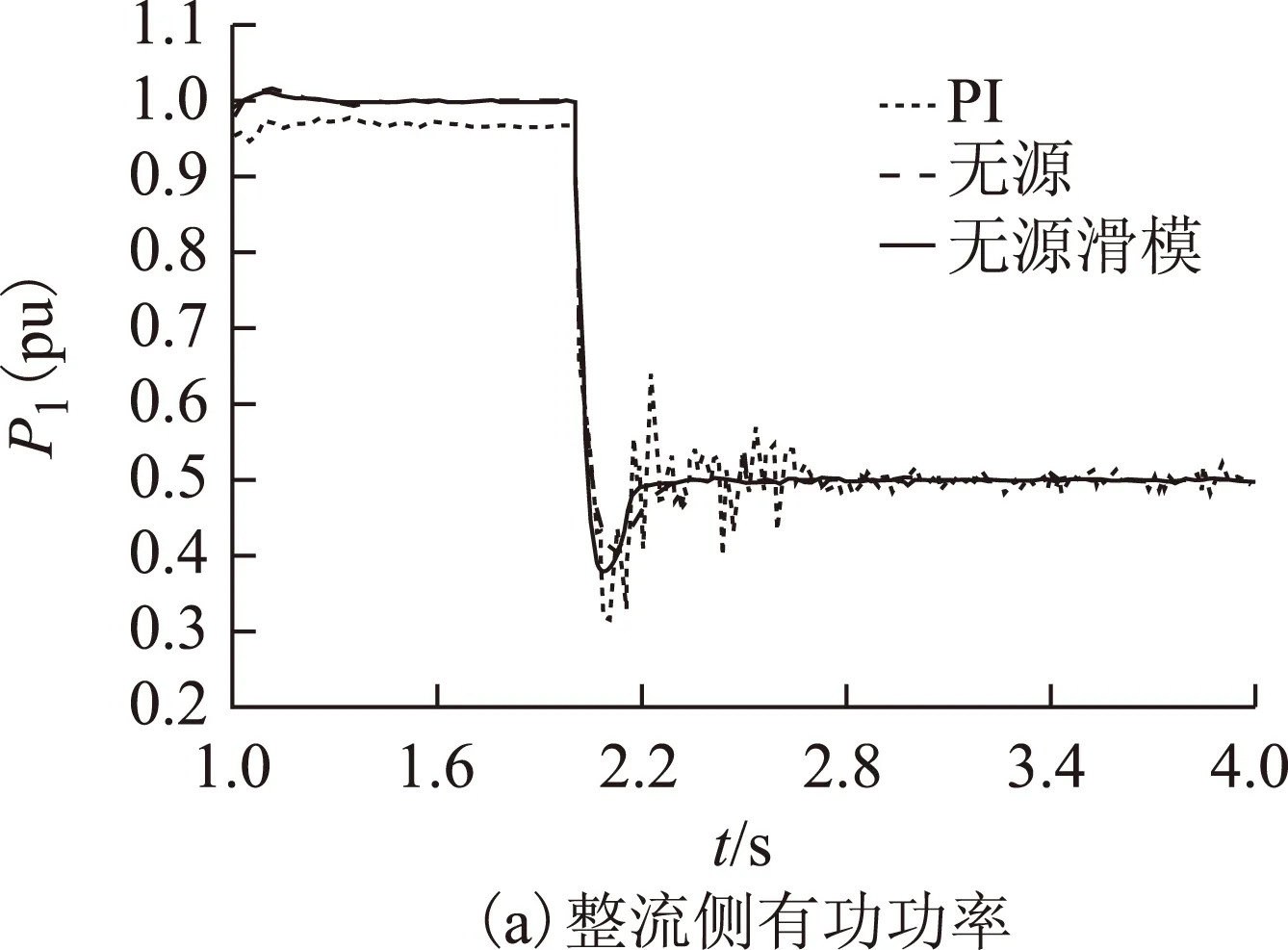
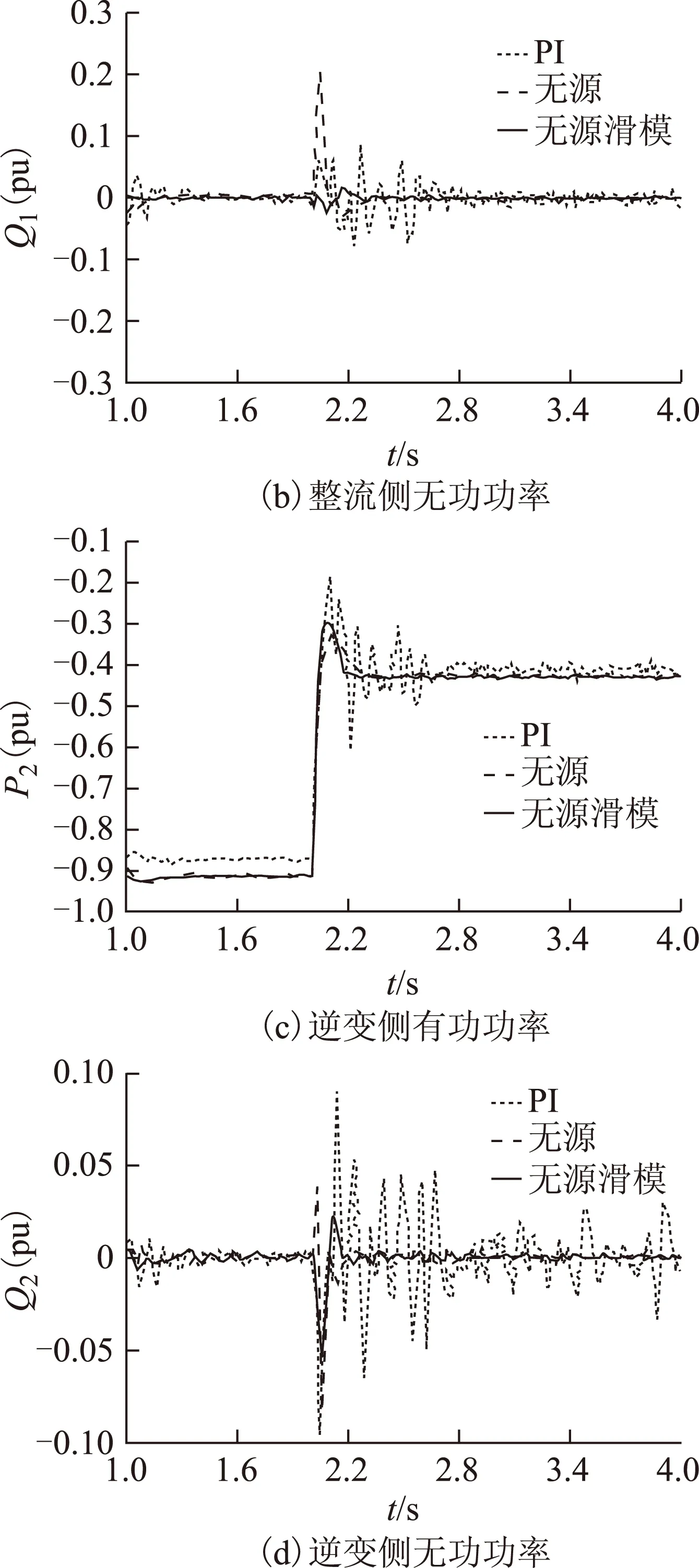
图5 两端换流变压器和换流站的等效阻抗发生变化下 系统的响应情况Fig.5 The response of VSC-HVDC system when the equivalent impedances of the converter transformers and convertor stations change
5 结论
基于PCHD模型的无源控制算法是无源控制理论的最新进展。本文针对VSC-HVDC系统,提出了一种较为简便的基于PCHD模型的无源控制设计策略。为了进一步提高其鲁棒性,结合滑模控制的设计方法,又提出了一种无源滑模控制策略。仿真实验表明,基于PCHD模型的无源控制和无源滑模控制比PI控制具有更好的动态性和鲁棒性,且设计方法简单。但仍然存在一些问题:无源滑模控制器的滑模参数取值范围较小;电流参考量的求取即外环控制仍采用PI控制,特别是控制Udc的一侧,会在一定程度上影响VSC-HVDC系统的鲁棒性。
[1]Moharana A,Dash P K.Input-output linearization and robust sliding-mode controller for the VSC-HVDC transmission link[J].IEEE Transactions on Power Delivery,2010,25(3):1952-1961.
[2]李爽,王志新,王国强,等.三电平海上风电柔性直流输电变流器的PID神经网络滑模控制[J].中国电机工程学报,2012,32(4):20-28.
Li Shuang,Wang Zhixin,Wang Guoqiang,et al.PID neural network sliding-mode controller for three-level offshore wind power VSC-HVDC converter[J].Proceedings of the CSEE,2012,32(4):20-28.
[3]郑连清,池俊锋,陆治国.基于三级模糊自适应PI控制的VSC-HVDC 控制器设计[J].电力系统保护与控制,2011,39(23):117-122.
Zheng Lianqing,Chi Junfeng,Lu Zhiguo.Three-step fuzzy adaptive PI controller for VSC-HVDC system[J].Power System Protection and Control,2011,39(23):117-122.
[4]杨伟,章慧芸,仲海波.基于模糊神经网络的 VSC-HVDC 系统控制器的研究[J].电力系统保护与控制,2014,42(8):115-120.
Yang Wei,Zhang Huiyun,Zhong Haibo.Research on controller of VSC-HVDC system based on fuzzy neural network[J].Power System Protection and Control,2014,42(8):115-120.
[5]王珂,刘建涛,李亚平,等.柔性直流输电系统的自适应下垂反馈控制方法[J].电力系统保护与控制,2014,42(9):48-53.
Wang Ke,Liu Jiantao,Li Yaping,et al.An adaptive power control strategy based droop feedback for VSC-HVDC[J].Power System Protection and Control,2014,42(9):48-53.
[6]王国强,王志新.粒子群与PIDNN控制器在VSC-HVDC中的应用[J].中国电机工程学报,2011,31(3):8-13.
Wang Guoqiang,Wang Zhixin.Application of PSO and PIDNN controller for VSC-HVDC[J].Proceedings of the CSEE,2011,31(3):8-13.
[7]王久和,黄立培,杨秀媛.三相电压型PWM整流器的无源性功率控制[J].中国电机工程学报,2008,28(21):20-25.
Wang Jiuhe,Huang Lipei,Yang Xiuyuan.Power control of three-phase boost-type pwm rectifier based on passivity[J].Proceedings of the CSEE,2008,28(21):20-25.
[8]张晓华,张卫杰.三相电压型PWM整流器的IDA-PB控制[J].电工技术学报,2009,24(3):122-127.Zhang Xiaohua,Zhang Weijie.IDA-PB control for three-phase pwm voltage source rectifier[J].Transactions of China Electrotechnical Society,2009,24(3):122-127.
[9]范心明,管霖,何健明,等.风电接入下柔性直流输电的无源解耦控制[J].电工技术学报,2013,28(10):311-219.Fan Xinming,Guan Lin,He Jianming,et al.Decoupling passivity control of VSC-HVDC connected wind power[J].Transactions of China Electrotechnical Society,2013,28(10):311-219.
[10]蔡新红,赵成勇.基于欧拉-拉格朗日模型的模块化多电平换流器的无源控制[J].电工技术学报,2013,28(10):224-232.
Cai Xinhong,Zhao Chengyong.Euler-Lagrange model based passive control for modular multilevel converter[J].Transactions of China Electrotechnical Society,2013,28(10):224-232.
[11]王久和.三相三线电压型PWM整流器非线性控制策略[J].北京信息科技大学学报 (自然科学版),2014(5):003.
Wang Jiuhe.Nonlinear control strategies for three phase three line voltage source PWM rectifier[J].Journal of Beijing Information Science and Technology University,2014(5):003.
[12]Ortega R,van der Schaft A,Maschke B,et al.Interconnection and damping assignment passivity-based control of port-controlled Hamiltonian systems[J].Automatica,2002,38(4):585-596.
[13]Petrovic V,Ortega R,Stankovic A M.Interconnection and damping assignment approach to control of pm synchronous motors[J].IEEE Transactions on Control Systems Technology,2001,9(6):811-820.
[14]Ortega R,van der Schaft A,Castanos F,et al.Control by interconnection and standard passivity-based control of port-Hamiltonian systems[J].IEEE Transactions on Automatic Control,2008,53(11):2527-2542.
[15]范心明,管霖,夏成军,等.基于PCHD模型的柔性直流输电鲁棒控制[J].电力系统自动化,2013,37(15):40-46.
Fan Xinming,Guan Lin,Xia Chengjun,et al.PCHD based robust control of VSC-HVDC transmission based on port-controlled Hamiltonian with dissipation[J].Automation of Electric Power Systems,2013,37(15):40-46.
Passive Control and Auxiliary Sliding Mode Control Strategy for VSC-HVDC System Based on PCHD Model
Qian TiantianMiao ShihongLiu ZiwenRan XiaohongWu Yingjie
(StateKeyLaboratoryofAdvancedElectromagneticEngineeringandTechnologyHuazhongUniversityofScienceandTechnologyWuhan430074China)
Because of its global stability and singular-point-free property,The passivity based control (PBC) is gradually applied to the voltage sourced converter based high voltage direct current (VSC-HVDC) control system.A relatively simple port controlled hamiltonian with dissipation (PCHD) based PBC control strategy is proposed in this paper.And then an auxiliary sliding mode control strategy is used to enhance the robustness of the strategy.The simulation results in Matlab/Simulink prove that the proposed two strategies have better robustness and dynamic performance comparing to the PI controller.
Voltage sourced converter based HVDC,passivity based control,robustness,dynamics performance
2015-02-03改稿日期2015-09-25
TM72
钱甜甜女,1990年生,博士研究生,研究方向为交直流输电及其控制。
E-mail:qiantiantian@hust.edu.cn
苗世洪男,1963年生,博士,教授,博士生导师,研究方向为电力系统继电保护与运行控制、微电网与配电网新技术等。
E-mail:shmiao@hust.edu.cn(通信作者)
国家自然科学基金资助项目(51377068)。
猜你喜欢
农业机械学报(2020年2期)2020-03-09 07:35:30
中华建设(2019年7期)2019-08-27 00:50:18
电子制作(2019年12期)2019-07-16 08:45:14
电子制作(2019年11期)2019-07-04 00:34:54
北京航空航天大学学报(2017年6期)2017-11-23 05:57:06
项目管理技术(2016年12期)2016-06-15 20:29:33
西南交通大学学报(2016年6期)2016-05-04 04:13:11
互联网天地(2016年2期)2016-05-04 04:03:23
通信电源技术(2016年5期)2016-03-22 01:10:10
中国学术期刊文摘(2016年2期)2016-02-13 16:01:41