城市快速路施工区可变限速模型研究
2016-10-14 07:08李晓玲王伟智
福州大学学报(自然科学版) 2016年1期
李晓玲, 王伟智
(福州大学土木工程学院, 福建 福州 350116)
城市快速路施工区可变限速模型研究
李晓玲, 王伟智
(福州大学土木工程学院, 福建 福州350116)
引入可变限速的思想, 考虑影响施工区车速的因素如V/C、 大车率、 服从率等因素, 提出基于交通流理论和交通冲突技术的施工区可变限速模型. 通过仿真进行了模型的标定, 并基于算例得到施工区的限速值. 研究结果表明: 该模型能克服现有限速方法的不足.
快速路; 施工区; 可变限速; V/C; 大车率; 服从率; 交通冲突技术
0 引言
城市快速路服务于城市内的快速交通运输, 且兼高速公路和城市干道的特点, 在城市道路中的地位非同一般. 施工区常常不可避免地封闭车道, 导致施工区车速降低, 道路的通行能力大幅度减少, 施工区车辆从高速自由流向低速阻滞流过渡的过程中就存在很大的安全隐患. 当前我国的大部分施工区都缺乏相对规范化的交通组织和管理, 施工区的交通环境变得更加复杂, 导致了施工区成为道路上的瓶颈路段, 成为交通运输中最薄弱的地方, 经常发生交通拥堵和交通事故.
国内外对施工区的研究主要体现在3个方面: 施工区的相关规范研究、 施工区的交通特性研究以及施工区仿真研究等. 美国在施工区限速值确定及限速方法方面的研究具有一定的代表性, 对施工区各种限速措施效果进行了评价[1-2], 在施工区内实施了VSL(variable speed limits)可变限速控制策略[3]. 国内对施工区的研究主要是施工区交通信号控制研究[4]、 限速标志位置研究[5]和限速方案评价[6-7]等方面, 但对于施工区的限速值的确定通常是人为取值后评价限速方案的优劣, 缺乏科学性和可靠性.
针对可变限速的算法, 国内外主要包括3类: 基于交通流模型的算法、 加权法和智能算法. 基于交通流模型的算法主要是对交通流模型的推导、 改进和融合. 加权法是指先得到理论限速值, 然后对驾驶人行为、 道路条件、 交通条件等影响因素进行加权处理, 最终得到限速值. 智能算法主要包括神经网络、 模糊控制、 遗传算法、 强化学习等. 本文综合这3种方法的特点, 考虑影响施工区限速值的因素, 采用加权法和交通流模型法及交通冲突技术相结合的方法确定施工区的可变限速值.
1 快速路施工区分析
1.1施工区基本组成
参考《城市道路施工作业交通组织规范 (GA/T 900—2010)》[8], 施工区由警告区、 上游过渡区、 缓冲区、 工作区、 下游过渡区和终止区组成, 如图1. 图中: 数字1~7分别代表施工区的各控制区段的起终点.
1.2施工区的交通特性分析
在施工区, 道路环境发生了明显的变化. 为保证施工的顺利进行, 施工区相对一般道路增设标志标线、 隔离设施等, 导致驾驶员在单位时间内获取的信息量增多, 驾驶员的适应性变差; 道路上的参与者(驾驶员、 施工人员及施工机械操作人员)更多, 因此交通环境变得更加复杂.
此外, 施工区不可避免地要占用部分道路空间, 施工区的开放车道数或车道宽度减少, 导致施工区的通行能力大大降低. 施工区车道总宽度减少, 车辆在行驶时的交通冲突增多, 行车不安全性增加, 直接影响驾驶人的驾驶行为, 对驾驶员的驾驶技术提出更高的要求.
对于施工区的拥堵现象以及安全隐患, 在交通流中表现为车辆速度的变化. 驾驶员习惯性忽略限速、 合流等警示标志, 车辆由高速自由流向低速阻滞流转换的过程就存在潜在的安全隐患. 所以, 如何合理控制快速路施工区速度是至关重要的条件.
2 施工区限速影响因素
对于限速值的影响因素, 需要从影响速度的因素分析入手. 影响速度变化的因素有很多, 包括人的因素(驾驶员的技术、 年龄及驾驶员的生理、 心理状态等)、 车的因素(车型、 车龄等)、 路的因素(道路等级、 道路的平纵曲线、 线形、 车道、 视距及路面状况等)、 交通因素(交通量、 交通组成及交通管理措施等)及环境因素(季节、 气候、 时间及沿线道路街道化的程度等)等. 鉴于上节所述施工区的特殊性质, 主要讨论如下几项因素, 见图2.
3 可变限速模型
3.1基于交通流理论的速度模型
交通流模型是描述道路上速度、 流量、 密度三参数之间关系的模型. 以静态交通流模型为基础, 以施工区所能通过的交通量最大为目标, 建立速度模型. 最早的速度—密度模型是由格林希尔兹于1935年提出的, 即格林希尔兹线性模型, 该模型适用于密度适中的交通条件:
(1)
式中: vf为自由流速度, 一般介于限制速度和设计速度之间; kj为阻塞密度, 该值较难获得, 一般在115~155veh·km-1(veh为车流量)的范围内.
因此, 流量与密度关系则可以表示为:
(2)
令vm和km分别为交通流量最大qm时对应的车速和密度. 当交通流量最大时,vm=vf/2,km=kj/2,qm=vfkj/4. 对于特定道路上的交通流, 令流量最大时对应的速度为限速值, 即令vs1=vm,vs1即为基于交通流模型的限速值.
3.2基于冲突技术的安全速度模型
交通冲突技术(trafficconflicttechnique,TCT)是对冲突当事双方的相对位置和冲突速度进行观测并以安全临界标准检验冲突与事故接近水平的过程.
施工区的冲突示意图见图3, 车道1的车辆享有优先通过权, 车道2的车辆等待车道1车流的可插车间隙汇入其中. 此时的车辆2若不采取避让行为, 那么两车将在图中所示的碰撞点发生冲突, 产生交通事故.
假设车辆2是优先避险的冲突车辆, 速度为 v2(km·h-1), vc为冲突车辆在冲突结束后的速度, L为冲突车辆假想碰撞点的距离, 视为冲突距离, 冲突车辆的减速度为a (m·s-2), 通常取3~5m·s-2. 那么, 碰撞前时间tc(timetocollision,TTC)为:
(3)
交通冲突的严重性判别中, 以碰撞前时间作为冲突严重性判定指标, 采用累积频率分析方法, 针对不同的冲突初始分类, 给出类与类之间的界定值[9], 原理如图4.
文献[9]中, 以碰撞前时间tc为衡量指标, 对交通冲突严重性的划分得到了明确的结果, 即1.0≤tc≤2.0s时为非严重冲突, tc≤1.0s时为严重冲突, tc>2.0s时的交通危险事件不构成冲突. 因此, 取tc=2.0s作为评判是否发生冲突的标准. 若已知冲突距离或者制动减速度以及碰撞后冲突车辆的速度, 则冲突车辆的速度 v2便可计算得出. 令 vs2=v2, 得到基于交通冲突的限速值 vs2.
3.3可变限速模型

(4)
式中: vs为施工区限速值; εV/C为V/C修正系数; εh为大车率修正系数; εc为驾驶员服从率修正系数;εw为能见度修正系数.
4 模型标定

通过固定其他因素不变, 仿真时只变动一个因素, 分别得到以下的修正参数拟合函数, 见图5~7所示. 对于能见度和路面条件2个因素, 由于仿真软件当中没有相关设置, 所以采用美国ASSHTO的NCHRP模型, 该模型中反映了能见度、 路面摩擦因数与最大安全行驶速度的关系[10], 模型如下:
(5)
式中: v为行驶车速,km·h-1; i为路面摩擦系数; a为坡度; Ls为前后车的安全距离, 一般取5~10m; Lv为能见度,m.
求解得到最大安全行驶车速为:
(6)
将vm除以基准情况下的限速值即得到修正系数.
因此,V/C修正系数的拟合函数为εV/C=1.097 9(V/C)-0.379; 大车率修正系数的拟合函数为εh=-0.002 h+0.895 8, 其中h为大车率; 驾驶员服从率修正系数的拟合函数为εc= 4×10-5c2-0.003 9c+0.970 7, 其中c为驾驶员服从率.
5 算例
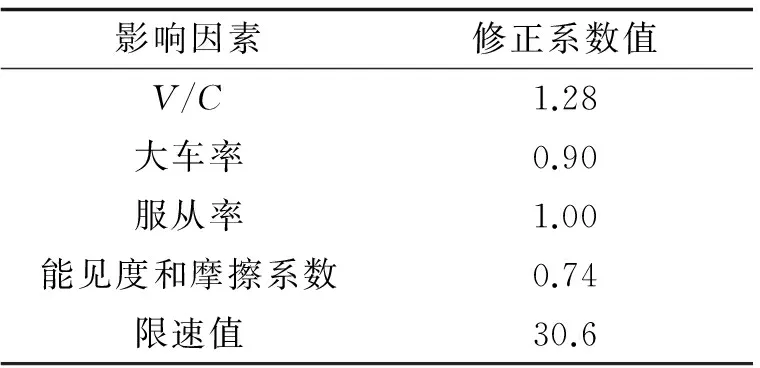
表1 施工区限速值计算Tab.1 Calculation of speed limitfor work zone

6 结语
对快速路施工区的特性进行分析, 施工区的安全隐患主要来源于车辆行驶车速的变化. 对影响施工区速度的因素进行分析, 提出基于交通冲突技术和交通流理论的限速模型, 并对模型的修正系数进行了标定. 模型中施工区长度和过渡区段的长度均为定值, 未进行深入分析控制区段长度的变化对施工区的影响, 此处应为日后将要研究的方向. 影响施工区限速值的因素还有很多, 其他关键因素对施工区限速的影响还需要继续研究.
[1]FONTAINEM,CARLSONP.Evaluationofspeeddisplaysandrumblestripsatrural-maintenanceworkzones[J].TransportationResearchRecord:JournaloftheTransportationResearchBoard, 2001(1 745): 27-38.
[2]COPELANDJJ.Speedmanagementstrategiesforruraltemporaryworkzones[D].Fredericton:theUniversityofNewBrunswick. 2003.
[3]KANGKP,CHANGGL,ZOUN.Optimaldynamicspeed-limitcontrolforhighwayworkzoneoperations[J].TransportationResearchRecord:JournaloftheTransportationResearchBoard, 2004(1 877): 77-84.
[4] 宋志洪, 梁子君. 城市半幅占道施工区交通信号控制方法研究[J]. 中国科技纵横, 2013(22): 49-50.
[5] 于仁杰, 马荣国, 韩海, 等. 高速公路施工区限速标志位置确定方法[J]. 交通运输工程学报, 2013, 13(5): 91-98.
[6] 黄凯, 何勇, 唐健娟, 等. 公路施工区限速值大小研究[J]. 公路, 2011(5): 112-115.
[7] 王强, 王显璞. 高速公路养护施工区限速控制研究[J]. 交通信息与安全, 2010 (1): 124-129.
[8]公安部道路交通管理标准化技术委员会.城市道路施工作业区交通组织规范:GA/T900-2010 [S]. 北京:中国标准出版社, 2011
[9] 项乔君, 陆键, 卢川, 等. 道路交通冲突分析技术及应用[M]. 北京: 科学出版社, 2008.
[10] 余凯, 张存保, 石永辉. 基于多元因素的高速公路可变限速值计算方法研究[J]. 交通信息与安全, 2011, 29(1): 4-7.
(责任编辑: 蒋培玉)
The variable speed limits of urban expressway work zones
LI Xiaoling, WANG Weizhi
(College of Civil Engineering, Fuzhou University, Fuzhou, Fujian 350116, China)
The paper introduces the variable speed limit thought, considers the V/C, large vehicle mix rates, the compliance rates and other factors, puts forward the variable speed control model based on traffic conflict technique and the traffic flow theory of the work zone. The paper calibrates the model through the vissim simulation, and based on an example calculates the value of speed limits. The result shows that the model can overcome the shortage of the current speed limits.
urban expressway; work zone; variable speed limits; volume/capacity; large vehicle mix rates; compliance rates; traffic conflict technique
10.7631/issn.1000-2243.2016.01.0115
1000-2243(2016)01-0115-04
2015-04-24
王伟智(1960-), 教授, 主要从事智能交通的研究, wwz@fzu.edu.cn
福建省自然科学基金资助项目(2013J01186)
U491.2
A
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车实用技术(2022年14期)2022-07-30
中国交通信息化(2022年5期)2022-07-23
北京航空航天大学学报(2022年5期)2022-06-06
汽车实用技术(2022年7期)2022-04-20
环球时报(2022-04-16)2022-04-16
汽车实用技术(2022年4期)2022-03-07
计算机系统应用(2019年6期)2019-07-23
汽车电器(2018年1期)2018-06-05
人间(2015年21期)2015-03-11