假肢踝足装置分结构动态检验标准的方法改进
2016-10-11 02:11:45丁浩
质量技术监督研究 2016年4期
丁 浩
(福建省康复辅具技术服务中心,福建 福州 350001)
假肢踝足装置分结构动态检验标准的方法改进
丁 浩
(福建省康复辅具技术服务中心,福建 福州 350001)
文中对现有踝足装置分结构动态检测方法进行改进,使得在进行动态检测时的载荷更加接近于日常使用时所受到的载荷情况,提高了预测踝足装置使用寿命的准确性。
踝足装置;动态检验;载荷循环参数;国家标准
1 引言
“假肢”是一种用于整体或部分补偿肢体缺失或缺陷的体外装置。下肢假肢能代偿人体下肢的主要功能,经过一定的康复训练,可达到与健全人基本一致的步态效果,对于下肢截肢患者而言,装配下肢假肢是必不可少的。
整个国际社会都非常关心假肢的使用安全,人们也意识到检验标准将有助于假肢更好地发展,我国在2001年至2004年之间等同采用国际标准陆续发布了分为八个部分下肢假肢结构检验标准(GB/T 18375.1-8)。随着康复辅具技术的发展以及国际下肢假肢结构检验标准的不断改进,我国的下肢假肢结构检验标准修订工作也已开始进行。福建省康复辅具技术服务中心通过对国内外下肢假肢检验相关标准的研究,在原有的国家标准基础上对下肢假肢中踝足装置分结构的动态检验方法进行改进,定义相关术语,确定性能的要求并建立相关检验方法。
文中规定的动态强度检验程序,是用单一的试验力产生复合的试验载荷。在试验样品上的复合载荷取决于载荷各个分力的峰值,这些载荷模拟发生在行走过程中支撑期不同瞬间的载荷情况。
文中描述的检验方法为所有踝足装置作为单独组件(包括踝部件或踝部连接件)和所有假脚作为单独组件的分结构动态试验。
2 术语和定义
2.1踝足装置 ankle-foot devices[1]
设计替代踝部、足部部分功能的下肢假肢部件,包括单独的踝关节和足部组件等。
2.2验证强度 proof strength
对应偶然严重事件的静态载荷,假肢装置的结构需可以承受该负荷并仍然实现预定功能。
2.3极限强度 ultimate strength
对应极端单一事件的静态载荷,假肢装置的结构需可以承受该负荷但此后无法使用。
2.4疲劳强度 fatigue strength
假肢装置结构可承受的一个指定周期数的循环性载荷。
2.5批次 batch
提交给实验机构接受试验的一组假肢的装置试验样品,用以证明该样品符合本标准的一个或多个要求。
3 试验配置
3.1概述
为了在适当的坐标系里对试验样品进行对线调整,确定如下定义:
(1)假脚纵轴;
(2)踝关节等效中心;
(3)踝关节等效中心线。
3.2假脚纵轴
除非生产商特别规定,默认假脚纵轴应是通过脚前掌最宽部分的平分点和假脚长后四分之一处平分点的连线(见图1)。
3.3踝关节等效中心
3.3.1踝关节等效中心应按照3.3.2到3.3.4所述确定。
注:假脚跖屈和背屈机械轴的位置与试验样本在相应坐标系的对线是不相关的。
3.3.2按照3.2中所述的方法或生产商提供的说明确定假脚纵轴的位置。
3.3.3将假脚放置在水平面上,并将生产商所推荐高度hr的物块垫在假脚后跟(见图1)。
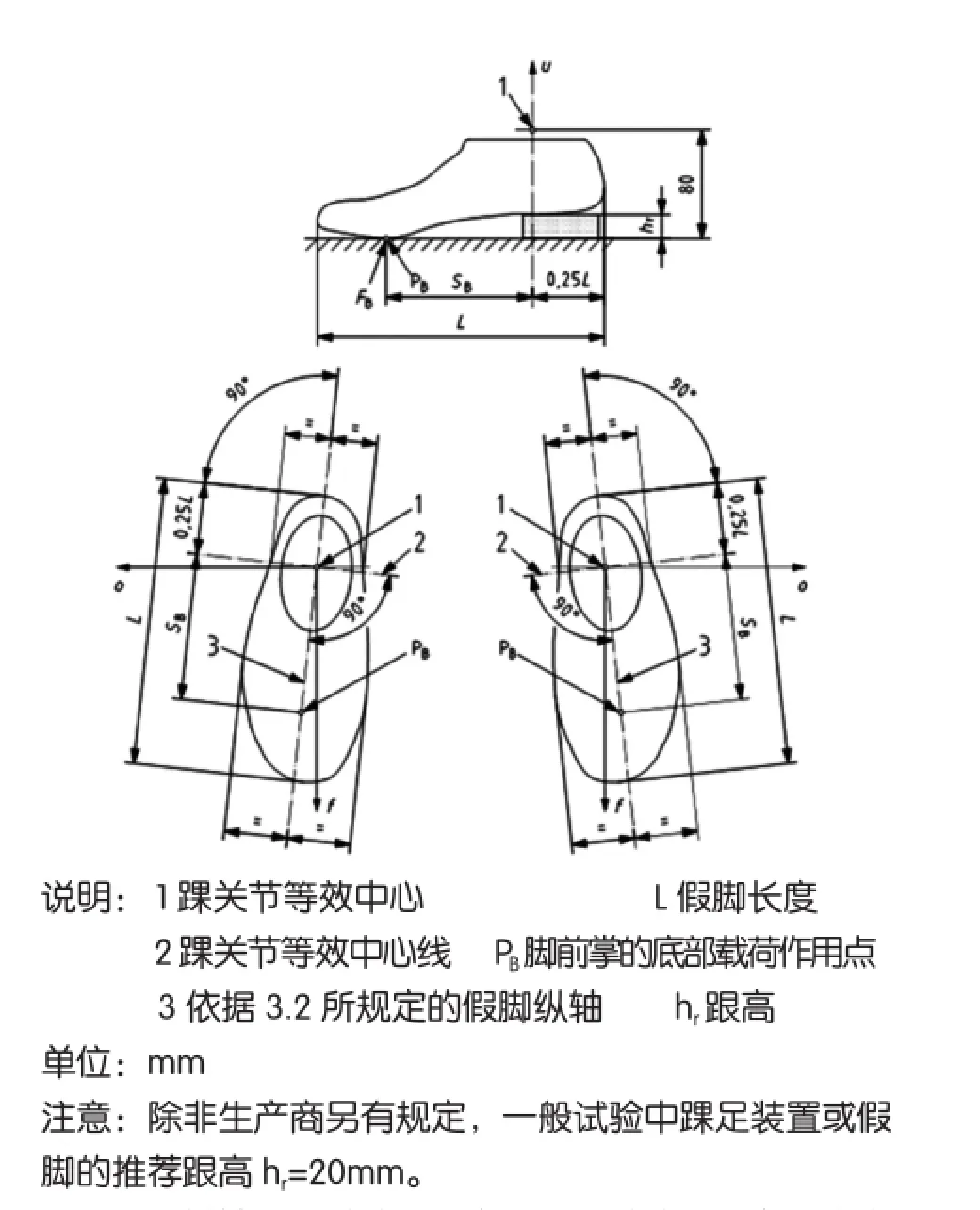
图1 假脚纵轴、踝关节等效中心和踝关节等效中心线的测定示意图
3.3.4踝关节等效中心位于:
(1)通过假脚纵轴的垂直平面内;
(2)在位于底部参照面以上80mm处的踝部参照面内,即在通过PB的水平线的上方80mm处;
(3)从假脚最后部算起脚长的四分之一处。
3.4踝关节等效中心线
踝关节等效中心线是一条通过踝关节等效中心的水平线,并和假脚的中心线垂直。
3.5踝足装置分结构动态试验中的试验力和力矩的名称和符号
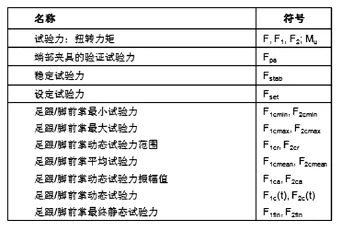
表1 试验力和力矩的名称和符号
3.6 踝足装置分结构试验中的试验加载条件
踝足装置部件的分结构动态试验由角度α决定的后跟部的载荷方向以及由角度β决定的脚前掌的载荷方向。坐标系内载荷作用线的位置见图2。每种试验和试验加载条件下试验角度与力的规定值见表2与表3。
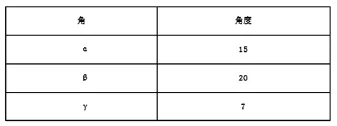
表2 踝足装置部件分结构检验的载荷方向角
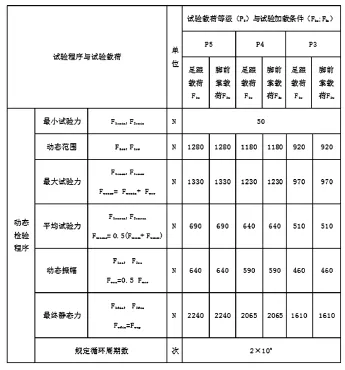
表3 所有踝足装置分结构检验的试验力与动态检验的规定周期数[2]
4 试验样品及实验设备
4.1用于踝足装置动态检测的样品要求
(1)踝足装置和假脚样品一批次数量应不少于2;
(2)可用刚性杠杆代替踝足装置或假脚部分部件(底部载荷应用杠杆),剩余的假肢结构样品必须满足国家标准所规定的主结构试验标准。
4.2踝足装置分结构试验的试验样品设置[3]
该踝足装置部件在坐标系中的对线应按照图2、表2及试验呈交文件规定进行设置。
假脚纵轴(见3.2)应转动γ=7°,如图2所示,表2规定了踝足装置和假脚“脚趾伸出”的位置。

图2 试验设备上假脚的位置
4.3试验设备要求[4]
(1)试验设备产生的动态试验力应按照表3相关试验程序、试验加载条件和试验载荷等级达到规定值,并按表2的规定作用于角度α和β决定的方向上,如图2所示。
(2)动态试验力应通过加载平台转移到脚后跟和脚前掌部位,加载平台可调节到垂直于脚后跟加载角度α和脚前掌加载角度β决定的方向上。加载平台应使横向力的传递最小化(如图2)。
(3)试验设备将产生两个脉冲试验力F1c(t)和F2c(t),如图3所示。
(4)脉冲试验力F1c(t) 和F2c(t)波形应为正弦波[如图3 a),b)和c)]。如果该试验力因某种原因无法为正弦波,则脉冲试验力F1c(t) 和F2c(t)波形应该是平滑没有毛刺的。
(5)试验力F1c(t) 和F2c(t)应为单脉冲力,在动态范围F1cr和F2cr内振荡,从最小试验力F1cmin和F2cmin到最大试验力F1cmax和F2cmax,此处:
F1cmax= F1cmin+ F1cr
F2cmax= F2cmin+ F2cr
(6)为了设置试验设备使产生的脉冲试验力F1c(t) 和F2c(t)为正弦波,一般要求平均试验力F1cmean和F2cmean、动态幅值F1ca和F2ca以及试验力F1c(t)和F2c(t)的输入值满足以下公式:
F1c(t) = F1cmean+ F1casin(ωt),其中F1cmean= 0.5 (F1cmin+ F1cmax) 且F1ca= 0.5 F1cr;
F2c(t) = F2cmean+ F2casin(ωt-nπ)其中F2cmean= 0.5(F2cmin+ F2cmax)且F2ca= 0.5F2cr。
其中,sin(ωt)描述的频率为f=ω/(2π)Hz的正弦波,(ωt - n π)指的是F2c(t)产生一个相位偏移,对应于n=1时的半个正弦波周期[图3a)和c)]和一个n=2时的完整正弦波周期[图3b)]。
(7)脉冲试验力Fc(t)的瞬间最小值Fcmin公差为±25N,瞬间最大值Fcmax公差为规定最大值的±3%,动态试验频率的公差规定为使用检验频率的±10%。
如果脉冲试验力F1c(t) 和F2c(t)大小超过以上规定的公差,应关闭试验设备。
注:经验表明,重复加载超过最大试验力F1cmax或F2cmax多于10%的值可导致试验样品过早的损坏。

图3 踝足装置的分结构动态试验的加载周期的载荷循环参数[5]
5 试验方法
(1)踝足装置分结构动态试验应如(2)至(12)中所描述的对同一试验样品的足跟和脚前掌交替进行加载。
(2)该试验应遵循以下基本要求:
(a)在动态试验过程中,当循环周期数达到一个定值时,特定部分应使用依据生产商的操作规程或是呈交文档中指明的替代件进行替代。记录所有的替代情况。
(b)一个试验样品完成并通过动态试验后,应对其足跟和脚前掌施加试验力F1fin和F2fin的最终静态载荷,先后以100N/s至250N/s之间的速率进行加载,并在每一次加载时维持(30±3)s。
(c)无论试验样品是否通过动态试验,都需以呈交文档中所规定的放大倍率进行外观检查,记录所有出现的断裂或裂缝产生的位置和性质,同时记录使用的放大倍率。
(3)在符合规定的样品批次中的准备一件试验样品并进行调整。
记录应用的试验加载等级、角度α、角度β以及试验力F1和F2相对应的值,确定足跟和脚前掌载荷的方向和大小,以及规定的循环周期数。
(4)根据表2的规定,设置足跟载荷方向的角度为α,脚前掌载荷方向的角度为β,并调整足跟加载平台和脚前掌加载平台与其各自的载荷方向相垂直。
(5)按照图2的说明将试验样品安置到试验设备中。
(6)先后对试验样品的足跟加载最大试验力F1cmax以及对脚前掌加载最大试验力F2cmax,根据表3中的规定确定相应试验载荷等级下最大试验力的值。
如果试验样品的足跟和脚前掌相继经受住了F1cmax和F2cmax的载荷,则进行(7)这步骤。
如果试验样品的足跟或脚前掌未能经受住F1cmax和F2cmax的载荷,则记录各加载方向上的试验力达到的最大值,并终止试验。
(7)对试验样品的足跟和脚前掌交替施加脉冲试验力F1c(t)和脉冲试验力F2c(t),根据表3中的规定和4.3中的要求确定相应试验载荷等级下脉冲试验力的值,根据试验呈交文件其周期频率应在0.5Hz至3Hz之间,使试验样品和试验仪器达到规定设置要求。
注:要求试验到达规定设置要求的循环周期取决于试验样品的特性和试验仪器的控制机制。
注意在调整规定设置要求期间,应用在足跟和脚前掌的力的最大值不能超过最大力F1cmax和F2cmax多于10%。
确定试验样品和试验仪器已经达到规定设置要求,然后进行步骤(8)根据图3的规定确定脉冲试验力F1c(t)和F2c(t)的波形图,并确保公差在控制在规定的范围内。
记录要求的频率,以及达到稳定状态要求的周期数和应用的脉冲试验力F1c(t)和F2c(t)。
如果无法达到要求的频率或是无法应用规定的脉冲试验力F1c(t)和F2c(t),则使用不同的频率重复(7)之前的步骤,该频率为实验机构和生产商所商定的,介于0.5Hz至3Hz之间。
记录所有不同于要求值的频率协议。
如果脉冲试验力F1c(t)和F2c(t)无法应用实验机构和生产商所商定的所有频率,记录该情况并终止试验。
(8)对试验样品交替进行的足跟加载脉冲试验力F1c(t)以及对脚前掌加载脉冲试验力F2c(t),并根据表3中的规定确定相应试验载荷等级下试验力的值,按照试验呈交文件确定一个介于0.5Hz至3Hz之间的频率,或是依据任何关于频率的协议确定一个不同的介于0.5Hz至3Hz之间的频率,进行表3所规定的循环次数。
检查脉冲试验力F1c(t)和F2c(t)的波形图。如果波形图不符合4.3的要求则终止试验。
记录应用的频率、检查波形图的结果以及是否继续试验的决定。
(9)在动态试验期间,对任何需替代的部分进行替代。流程需按照如下进行:
当加载的循环次数达到生产商的使用规程或试验呈交文件中标明这些部件应该被更换或替代的值时,停止试验仪器。记录关闭时的循环次数。
根据生产商的使用规程或试验呈交文件对特定部分进行更换或替代。
从(3)或(7)重新开始试验,这取决于这些部分的机械特性以及这些更换或替代的试验样品是否需要重新装配的复杂程度。
记录更换或替代的细节和重新启动条件的结果,以及相关的条款编号。
(10)继续进行试验直到发生损坏或是足跟和脚前掌都达到了表3所规定的循环周期次数。记录关闭时的循环周期和是否发生损坏情况。
(11)对一个已经完成并通过动态试验的试验样品先后在足跟加载由角度α所确定方向的最终静态试验力F1fin和在脚前掌加载由角度β所确定方向的最终静态试验力F2fin,依据表3确定相应加载等级下该试验力的值,以100N/s至250N/s之间的速率进行加载。每一种加载情况都需保持最大加载值持续(30±3)s并记录结果。
如果试验样品在进行足跟加载最终静态试验力F1fin或是在脚前掌加载最终静态试验力F2fin发生损坏,记录该情况以及试验力在两个方向上达到的最大值或是最终静态试验力F1fin和F2fin持续时间的最大值。
(12)判断并记录试验样品是否通过了(2)至(11)的试验程序,依据(15)的性能要求检查步骤(6),(10)和(11)的结果。
(13)如果试验样品未能满足(15)的性能要求,则检查它的材质,如有可能,检查所有损坏位置,并记录结果。
(14)对未能通过或者完成了踝足装置分结构动态试验和最终静态试验的试验样品进行外观检查,查出存在的断裂或裂缝的位置以及性质。
(15)性能要求
判定通过踝足装置分结构动态试验,试验样品应符合以下性能要求:
(a)试验样品应可以承受以规定的数值和倾角的最大试验力F1cmax和F2cmax分别对足跟和脚前掌先后进行静态加载;
(b)试验样品应可以承受以规定等级和范围的脉冲试验力F1c(t)和F2c(t)分别对足跟和脚前掌交替进行动态加载,并达到规定的循环周期;
(c)试验样品应可以承受以规定的数值和倾角的最终静态试验力F1fin和F2fin分别对足跟和脚前掌先后进行静态加载,并在各情况持续(30±3)s。
6 结束语
改进后的踝足装置动态检测方法使检测时的载荷模式更加接近于日常使用时所受到的载荷情况,提高了预测踝足装置使用寿命的准确性。理论上讲,附加的假肢检测还应考虑以下因素:预期使用功能、新材料的发展、环境的影响以及作为使用者的活动习惯。对这些因素的影响,目前尚无标准,所以要不断进行补充。
[1] GB/T 14191 假肢学和矫形器学术语 第1部分:体外肢体假肢和体外矫形器的基本术语[S].
[2]ISO/TR 16142:1999 医疗器械-医疗器械的安全和性能基本原则的标准选择指南[S].
[3]ISO 22523:2006 假肢和矫形器--要求和试验方法[S].
[4]ISO 22675:2006 假肢 踝足装置和假脚试验——要求和试验方法[S].
[5]ISO 10328-2006 假肢 下肢假肢的结构检验——要求和检验方法[S].
An Improved Approach to Standards for Prosthetics Ankle-foot Devices Separate Cyclic Test
DING Hao
(Fujian Technical Aids Service, Fuzhou 350001, Fujian, China)
In order to the loading during test closing to real conditions of lwalking, in this paper , the improved method of ankle-foot devices separate cyclic test is made. The method increases the prediction of the accuracy of the service life of ankle-foot devices .
Ankle-foot devices; Cyclic test; Load cyclic parameters; National standard
2016-05-12
丁浩,男,福建省康复辅具技术服务中心,助理工程师
猜你喜欢
中学生数理化·八年级物理人教版(2023年11期)2023-12-26 07:50:10
水上消防(2022年2期)2022-07-22 08:45:00
数学物理学报(2022年3期)2022-05-25 13:33:28
中外文摘(2020年19期)2020-10-31 12:51:08
意林·全彩Color(2018年7期)2018-08-13 09:35:14
中成药(2017年12期)2018-01-19 02:06:54
北京航空航天大学学报(2016年9期)2016-11-16 02:02:39
中国康复理论与实践(2015年7期)2015-05-09 08:31:38
发明与创新(2015年33期)2015-02-27 10:40:00
噪声与振动控制(2015年4期)2015-01-01 07:08:05