
基于Adams和CFD的海洋观测装置释放稳定性分析
2016-09-28 03:42余海波董峻魁刘宜胜
浙江理工大学学报(自然科学版) 2016年9期
余海波,董峻魁,刘宜胜
(浙江理工大学机械与自动控制学院,杭州 310018)
基于Adams和CFD的海洋观测装置释放稳定性分析
余海波,董峻魁,刘宜胜
(浙江理工大学机械与自动控制学院,杭州 310018)
应用Adams软件建立了一种海洋观测装置的释放试验仿真动力学模型,通过研究装置在不同海况和布放速度条件下的入水前动力学特性,得到了装置的速度、加速度和布放轨迹;应用CFD流体力学分析软件建立了三维流体分析模型,研究了入水后的流体力学特性,得到了装置插入海底的速度和角度。入水前和入水后两部分的运动仿真结果显示:海洋观测装置的整个释放过程能够安全稳定地进行,采样矛杆能够顺利地插入海底。该研究为保护装置上的测试元件及提高海洋观测装置的释放精度和稳定性提供了理论依据与实验基础,也为海洋观测装置的整体设计与制造提供了理论参考。
海洋观测;释放;稳定性;Adams;Fluent
0 引 言
为了保护海洋生态环境,促进海洋经济可持续发展,对海洋的观测与研究变得越来越重要[1]。海洋观测主要是对海底沉积物的观测与分析,因为海底沉积物的粒度特征是判断自然地理环境和水动力条件的良好标志,沉积物的声速和声衰减系数对于海洋声场分析、工程地质勘探及海洋地球科学研究都具有重要意义[2]。目前沉积物的测量技术一般可以分为两类:沉积物取样实验室测量和海底原位测量[3]。沉积物取样实验室测量方法相对简单,但是该方法容易改变沉积物周围的原始沉积环境(压力、温度、盐度等),难以获得准确的沉积物声学参数[3];而原位测量技术不会对沉积物造成扰动,能够获得实际状态下的声学参数,该测量技术已成为获得海底沉积物声学参数最直接有效的手段[4]。
随着对海洋的不断探索,海洋观测平台已逐步成为高新技术领域的研究热点[5-7]。传统的原位观测方法很难满足及时性和高覆盖范围的监测要求,而深海测试平台布放在深海海底,能对海底进行长期的实时监测[8]。如今,深海测试平台正朝着多功能化的观测网络的趋势发展,它可以为海洋生态环境的研究提供更多可靠的实时数据,为海洋对气候影响的研究给予支持,为海底地震引起的海啸等灾害提供预警[9]。
本文分别使用三维建模软件PROE、动力学软件Adams以及CFD流体力学分析软件,建立原位观测装置模型,通过在不同海况和释放速度条件下对原位观测装置进行模拟释放,结合有限元数值模拟结果中的速度云图和实测试验结果,分析不同海况和释放速度对释放稳定性的影响,为进一步提高海洋观测装置释放的安全性和释放效率提供一定的理论依据。
1 原位观测装置模型
原位观测装置总体设计图和海试实物照片如图1所示。原位观测装置主要部件包括声速仪、水听器、矛杆、接听器、电子仓、高度计等。原位观测装置通过矛杆上安装的水听器进行测试,利用插入沉积物的水听器阵列接收的声波时间差和振幅差,以得到海底沉积物原位声速和声衰减数据。8个声学水听器按照计算好的距离均匀分布,当矛杆靠自重插入海底后,船上的计算机控制处于矛杆侧端的声学发射换能器发出声信号,声信号穿透沉积层后,通过埋置在沉积物中良好耦合的水听器阵列进行接收和反馈。装置释放到海底以后船上的工作人员通过对信号衰减的分析能够对周围的海洋沉积物进行准确的测量和评估。
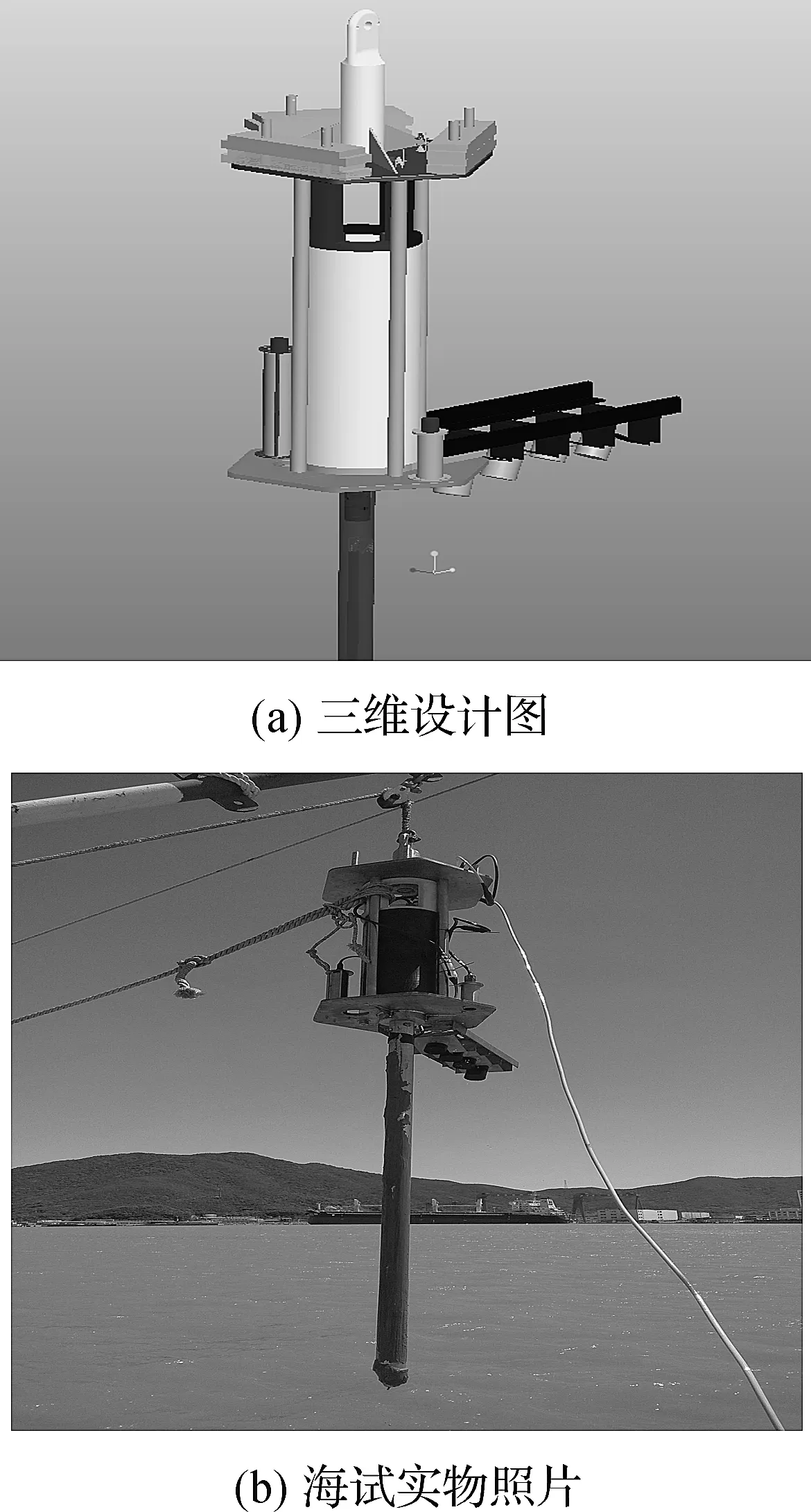
图1 原位观测装置三维设计图与实物照片
原位装置的释放在海面上进行,所以需要提前在近海进行释放实验验证释放的可靠性。由于机械结构设计的原因,释放过程中需要尽量保证矛杆垂直插入海泥里,所以能否将装置安全平稳并且垂直地插入海底是决定整个现场释放试验能否成功的关键,鉴于海洋环境的特殊性,本文将原位观测装置的释放仿真分为水上释放和水下运动两部分,分别采用在虚拟样机Adams模拟释放和Fluent流体软件中仿真计算,然后进行现场释放测试评估。
该释放实验在舟山近海水域进行,仿真模型包括释放所用的船体、卷筒、滑轮、钢丝绳等,全程模拟了在3级海浪条件下船体及钢丝绳的晃动对释放实验稳定性的影响。实验所用钢丝绳的直径为18mm,其有效横截面积254.34mm2,原位观测装置重量为612kg,高度为3.2m,宽度为1.1m。本文主要研究旋转杆在0到10s内,通过转动把原位装置支出船体,然后在10s后开始释放重物入水的过程。
2 仿真模型构建
2.1波浪载荷
船舶受海洋环境载荷作用产生振动运动,如果将船体近似为一个刚体,海浪对它的影响是一个平稳随机的过程,其幅值变化符合高斯分布规律[10],将海浪视为无限个由随机大小的波幅和波长组合的波浪,在仿真条件下,结合实际释放海域的海浪情况忽略高次的谐波,则建立波浪方程如式(1)所示:
(1)
其中:ξai、ωi、εi分别表示第i个谐波的振幅、角频率以及初始相位,初始相位εi的取值是0到2π之间的随机数。
2.2动力学方程
在Adams软件中采用多体系统动力学中的拉格朗日乘子法建立系统运动方程,在理想约束反力条件下,采用该运动方程能使系统避免出现不做功的情况,可以使方程未知变量的数量减到最少[11-13]。目前使用的虚拟样机技术仿真软件Adams就是采用该方法建立整个系统的动力学方程,其普遍形式可以表示为:
(2)
完整约束方程为:
φ(q,t)=0;
非完整约束方程为:

2.3建模原理与参数
根据释放实验的实际情况,按照整个释放系统结构参数进行虚拟样机建模,如图2所示。将旋转杆简化成通过旋转幅与船体连接的杆件,在钢丝绳一端定义运动函数模拟绞车的旋转,并根据绞车的转速添加驱动函数。滑轮和旋转杆通过固定幅连接,将波浪载荷加载到船体的质心上模拟海浪的运动。
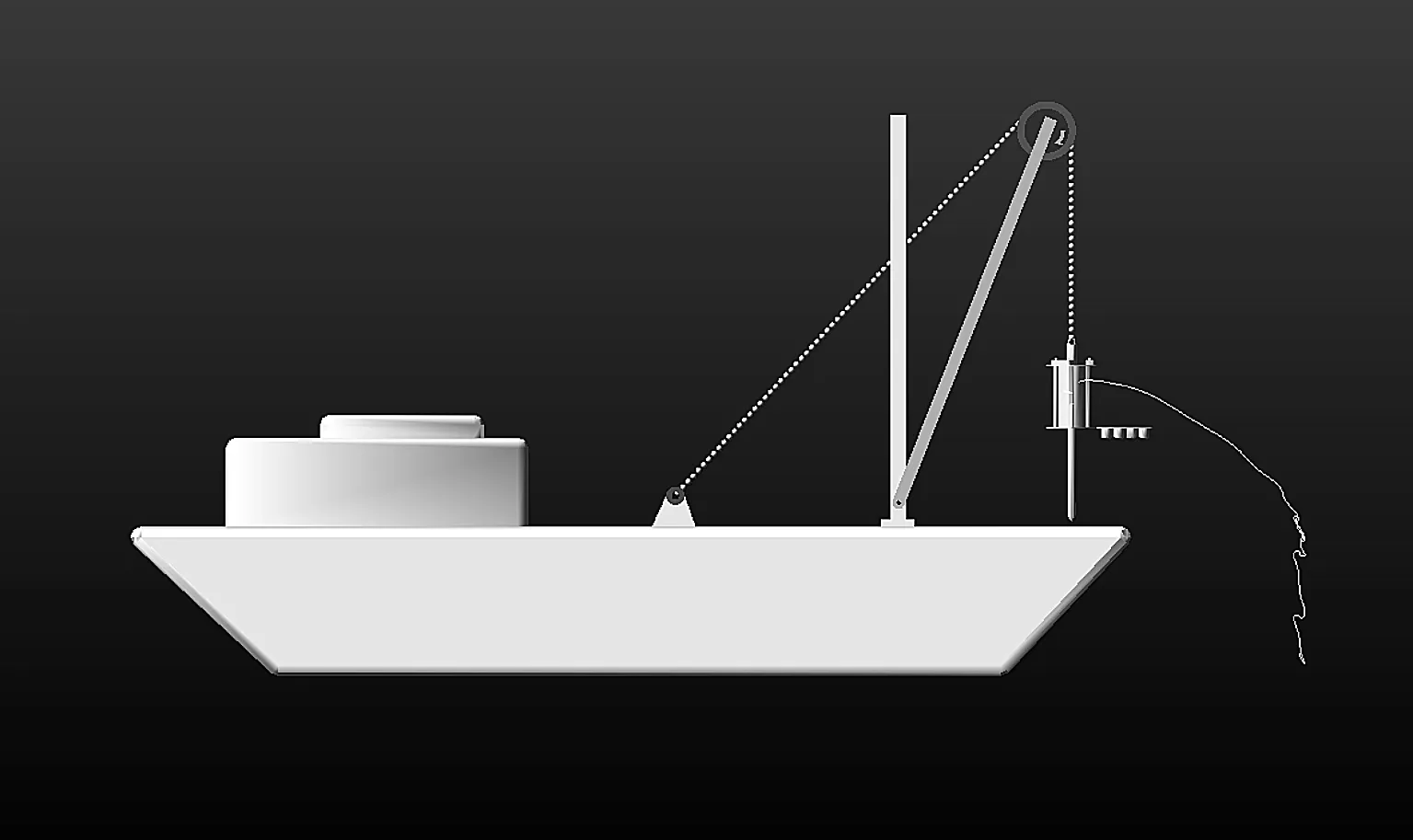
图2 原位观测装置释放实验虚拟样机模型
在Cable模块中钢丝绳的建模采用了利用轴套力来对柔性体进行有限元离散化的思想,将一段柔性体离散成若干个小圆球,再利用广应力对各个小球间进行柔性连接,广应力可以分别定义刚度系数、阻尼系数和6个方向上的分力,直接和轴套力的方程相匹配,也可以通过Adams函数对非线性轴套力编写程序,描述非线性的柔性体的运动学问题,轴套力的计算公式为[10]:
(3)
其中:Fx、Fy、Fz、Tx、Ty、Tz分别表示X、Y、Z方向上的力和力矩;R、θ、V、ω分别表示两小球之间相对位移、转角、速度、角速度;K、C分别表示刚性系数和阻尼系数。这些参数决定了钢丝绳的材料特性和动力学性能,取值根据实际选用的钢丝绳确定。
钢丝绳和绞车、滑轮之间的相互作用力用接触力代替并进行约束,Adams/Cable模块定义了离散小球与滑轮、卷筒的接触算法,各项参数需要根据材料属性、材料接触和碰撞参数推荐表进行设置,具体参数见表1。求解器所涉及到的参数根据实际情况进行不断调试和更改,在静平衡和动力学求解时采用GSTIFF积分求解器和I3积分格式提高运算效率和稳定性。

表1 接触参数
3 仿真结果与分析
本文仿真分别应用了动力学软件Adams中的View和Post processor两个基本模块,分析了原位观测装置在释放过程中的运动学和动力学特性,原位观测装置释放动画效果如图3所示,仿真得到的运动曲线基本与在舟山实际海试时原位观测装置的运动情况相符,海试实验能够顺利进行。
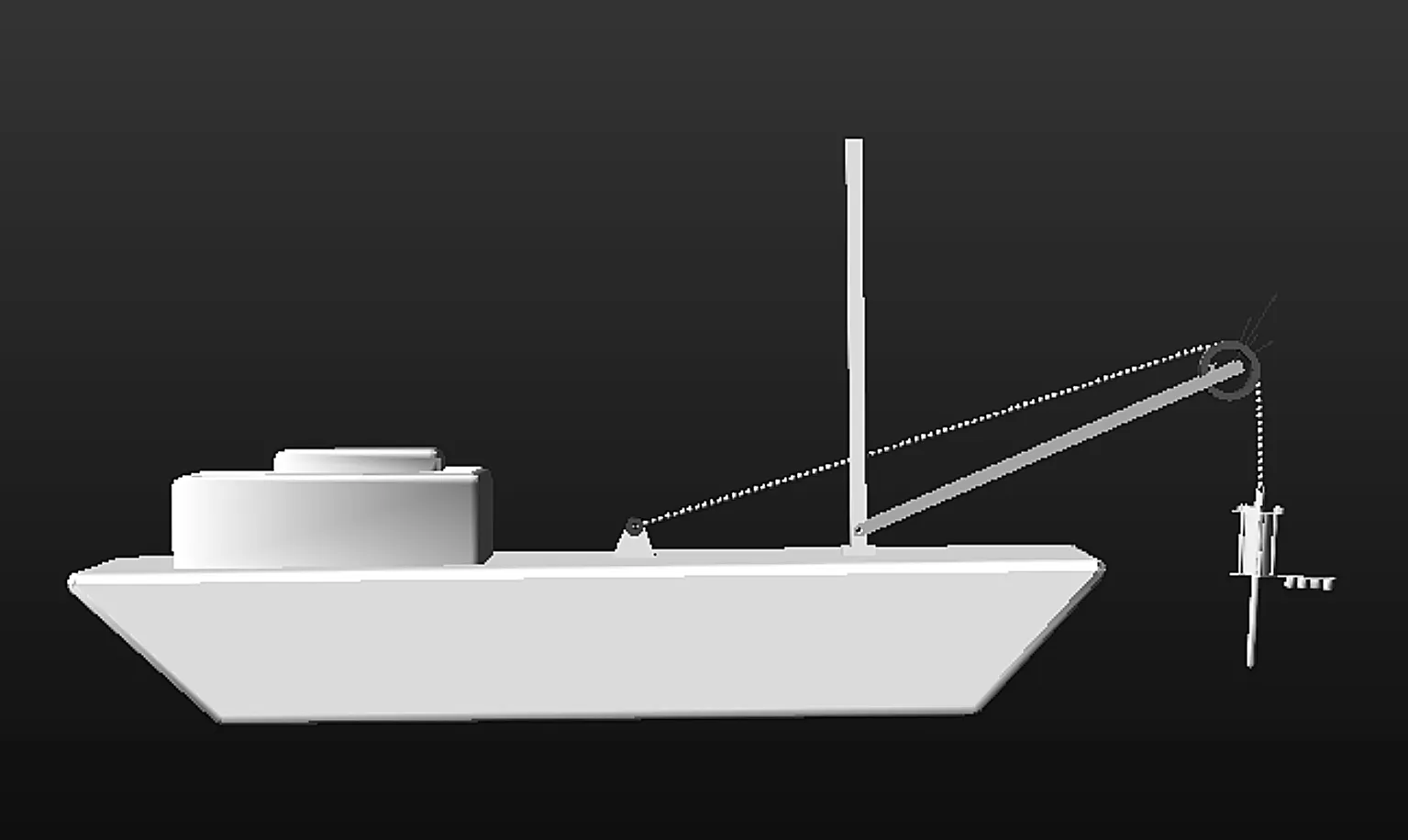
图3 原位观测装置释放动画效果
根据释放实验的现场情况,在不同的海况和释放速度条件下对装置进行模拟分析,分别得到了原位观测装置在3级和4级两种常见海况下的运动轨迹,波浪振幅的大小依据海浪的级数查询并按照比例进行设置。不同海况下装置的运动轨迹如图4所示,可以发现随着海况级数的增加,测试装置运动轨迹的波动性也越大,不利于装置的释放。
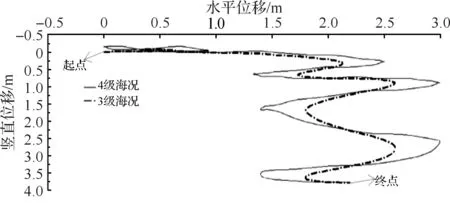
图4 不同海况下原位装置的运动轨迹
图5为不同释放速度时原位装置的运动轨迹。从图5中可以发现,释放的速度越大,摆动幅度越小,结合海试情况研究发现导致上述现象产生的原因是:释放过程中随着装置下降速度的增加,钢丝绳的长度逐渐增加,附加到释放端的质量也逐渐增大,传播过程中摆动的动力势能就会分散到绳子上,结果导致测试装置分散到的势能变少,绳子摆动幅度自然逐渐变小。

图5 不同释放速度时原位装置的运动轨迹
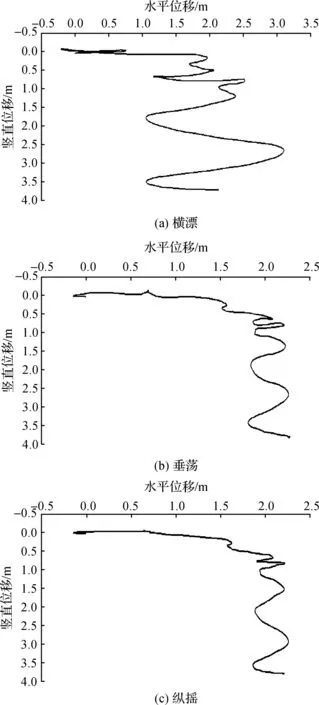
图6 原位装置释放时的轨迹
本文对3级海况下原位测量装置释放情况进行了动力学分析。结果发现,船舶在6个自由度上分别受到横荡、纵荡、艏摇、横摇、纵摇、垂荡的作用力,其中横漂、垂荡、纵摇对其在海面上的运动稳定性影响最大,为了简化仿真模型,本文忽略了横漂、垂荡和纵摇3种情况的耦合作用,针对性研究了在3种情况下的释放轨迹(图6)、加速度(图7)和绳子受力图情况(图8)。
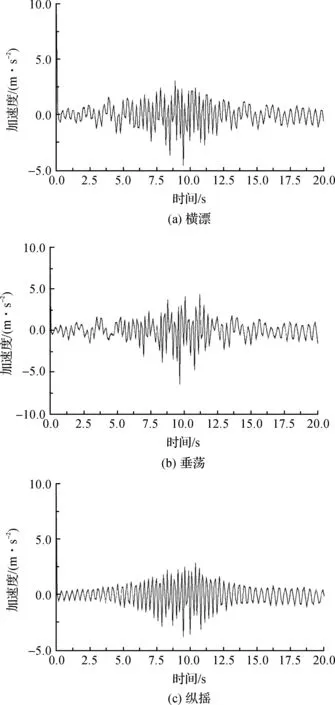
图7 原位装置释放时的加速度
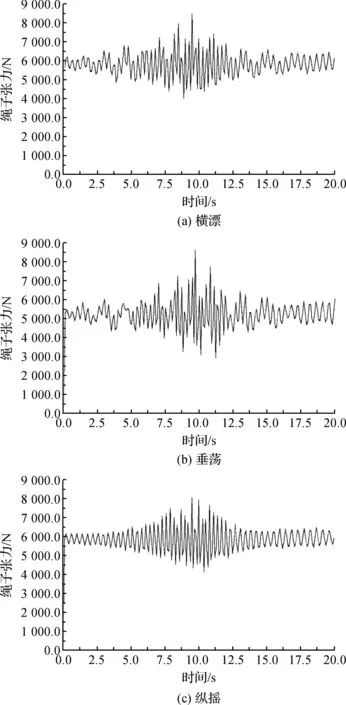
图8 原位装置释放时的钢丝绳张力
图6曲线表明,原位观测装置的释放运动轨迹和实际释放实验情况基本吻合,当受到横漂作用力时,装置在X方向上的偏移很大,而在垂荡和纵摇时摆动的幅度相对较小,所以可以得出横漂对装置在释放时的摆动影响最大;在垂荡时,Y方向绳子会产生轻微的松弛,因为船体在海浪的作用下产生颠簸,这会导致测试装置产生轻微的失重现象。
图7曲线表明,原位观测装置的固有频率远大于船体的振动频率,这能有效防止共振的产生。随着绳子的增长,加速度逐渐变小,有利于释放实验的平稳进行。系统的固有频率随着绳子逐渐地增长而变小,这也符合单摆模型的运动规律。在旋转杆停止转动,开始释放钢丝绳时会产生较强的加速度,这里可以适当减小释放的速度以减少瞬间的拉力对装置的影响,增加装置释放的平稳性。
图8曲线表明,横漂和纵摇时,钢丝绳的张力大小与变化趋势基本一致,而在垂荡时,由于船体的上下波动会使钢丝绳产生瞬间冲击力,导致系统产生极大的冲击,而随着绳子逐渐变长,系统的固有频率变小,绳子的张力也会逐渐变小,释放运动会逐渐平稳。
4 水下流体建模与分析
4.1CFD仿真设置
为了对原位观测装置释放过程中在水下的下落情况进行研究,利用了Workbench中自带的计算流体力学软件Fluent,首先将PROE里的模型导入ANSYS workbench,使用DM模块添加了一个圆柱形流场,然后对模型进行网格划分[14],最后导入到Fluent中对模型水下释放过程的稳定性进行分析,整个流场尺寸参数见表3,边界条件设置见表4。

表3 流场尺寸参数
表4 边界条件
在海洋环境中,不同海况下波浪的幅度和周期都不一样,船体受到的海洋载荷也不同,所以在水面上的仿真过程中加入了波浪载荷,而装置在水下运动时,由于深海环境下的水很平静,水流很缓慢,类似于静水环境,所以主要研究其静水运动特性。装置在海水中自由下降的过程为非定常问题,海洋环境符合k-ε湍流模型,运动过程中仅受重力、海水浮力以及海水绕流阻力的影响,需要通过当前时间步的计算结果来确定下一时间步的原位观测装置的受力和运动情况,在模型网格计算中属于被动型网格,网格的划分和控制难度较大。为减少网格数量,减少计算机,现将原位观测装置的物理模型做适当简化,并采用了非结构网格,以减少与计算结果相关性不大的微小网格,提高计算精度,整体网格划分如图9所示。
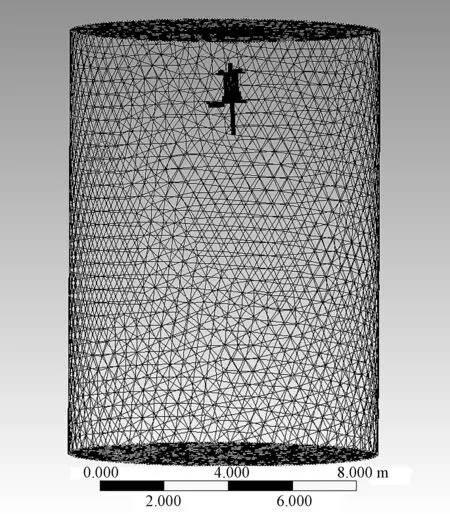
图9 整体网格划分
4.2仿真结果分析
在PROE中读取出简化模型的质量以及三个方向的惯性矩,定义初始速度等条件,通过VS2008编译到UDF中,定义模型周边为动网格运动区域,设置为每个时间步进行一次迭代更新,与Fluent形成实时动态的数据链接,克服了Fluent自带解释器的缺陷,提高了运行效率,仿真时间步长需小于最小网格尺寸,设定为0.002 s,经过软件长时间的迭代运算,压力云图和速度矢量图如图10和图11所示。
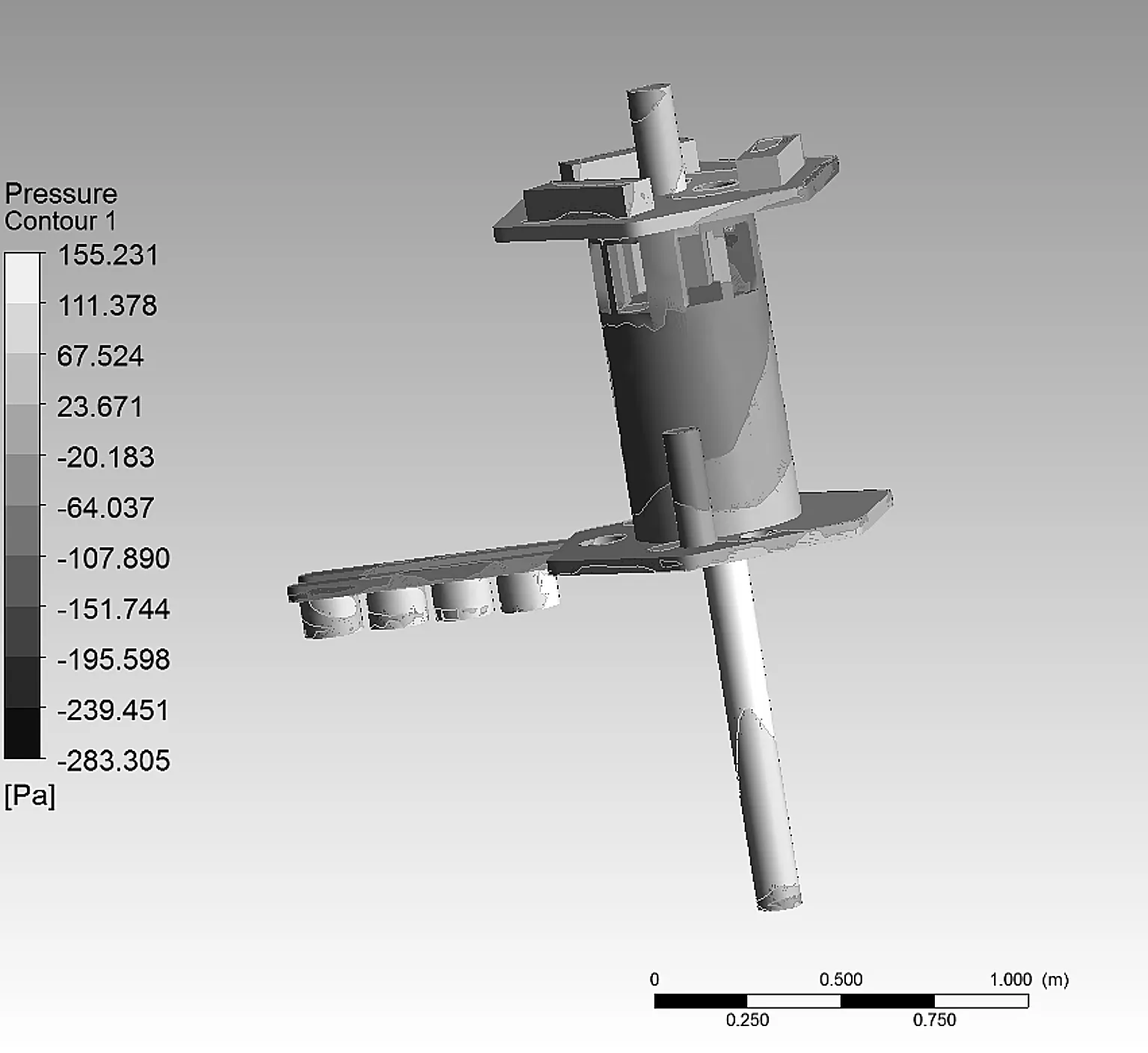
图10 压力云图
从仿真结果中可以发现:
a)原位观测装置的动态稳定性良好,运动到流场底部时装置绕X轴最大旋转角度为2.852°,绕Y轴的最大旋转角度很小约为0.499°,绕Z轴的最大旋转角度较大为5.417°,该角度满足装置插入海底的实际条件。
b)原位观测装置在水下释放过程中,由于机构的设计原因导致下底板的压力加大。整体压力云图如图10所示,可以发现最大压力出现在锚杆和下底板的连接处,因此加工时需要加大锚杆固定处的强度以免出现锚杆脱落或断裂等情况。
图11 速度矢量图
c)原位观测装置的6DOF模型在触及海底边界时会出现负网格导致运算错误,迭代自动终止。在接近海底边界时网格二次划分的质量也较差,因此在距离海底一定距离时的迭代数据较为精确,速度矢量如图11所示,原位观测装置经过1.438 s到达海底,速度为4.03 m/s,水对装置的阻挠力较大加速度约是3.17 m/s2。经过现场海试测验,结合释放速度和海况,原位海洋测试装置能够顺利地插入海底并完成对海底声速和声衰减的测量,成功地对海底沉积物进行分析。
5 结 论
a)利用Adams软件建立了原位观测装置的船上释放模型,分析了原位装置入水前的动力学特性与入水后的运动特性,得到了不同海况下装置的释放轨迹、速度、加速度、钢丝绳的张力变化,为原位装置在实际释放过程中,选择海况、配重、绞车参数等提供了理论依据和数据参考,也为后续的装置改进工作以提高装置的释放稳定性提供了分析工具。
b)利用PROE的建模功能和Fluent流体分析中的动网格技术对原位观测装置的静水稳性进行了校核,通过添加少量配重使原位装置获得较好的稳性。建立了原位观测装置水下运动的通用模型,并使用Fluent中的6DOF模块,记录了装置的运动状态。仿真结果表明原位观测装置在自由下降过程中稳定性良好,基本没有倾斜,满足实际工作要求。
[1] 高艳波,李慧青,柴玉萍,等.深海高技术发展现状及趋势[J].海洋技术,2010,29(3):119-124.
[2] 宫立新,杨燕雄,张甲波,等.海滩原位观测技术及应用[J].海洋地质前沿,2014,30(3):148-55.
[3] 侯正瑜,郭常升,王景强,等.一种新型海底沉积物声学原位测量系统的研制及应用[J].地球物理学报,2014,58(6):1977-1984.
[4] LI H X, TAO C H, LIU F L, et al. Effect of gas bubble on acoustic characteristic of sediment: taking sediment from East China Sea for example[J]. Acta Physica Sinica,2015,64(10):109101.
[5] WATERWORTH G. Connecting long-term seafloor observatories to the shore [J].Sea Technology,2004,45(9):10-13.
[6] PERSON R, AOUSTIN Y, BLANDIN J, et al. From bottom lander to observatory networks [J]. Annals of Geophysics,2006,49(2/3):581-593.
[7] DUENNERBIER F K, HARRIS D W, JOLLY J, et al. The Hawaii-2 observatory seismic system [J]. IEEE Journal of Oceanic Engineering, 2002,27(2);212-217.
[8] 陈鹰,杨灿军,金波.海底观测系[M].北京:北京海洋出版社.2006:21-65.
[9] 上海海洋科技研究中心,海洋地质国家重点实验室.海底观测:科学与技术的结合[M].上海:同济大学出版社,2011:12-23.
[10] 黄祥鹿,陆鑫森.海洋工程流体力学及结构动力响应[M].上海:上海交通大学出版社,1992:21-36.
[11] 郑建荣.虚拟样机技术入门与提高[M].北京:机械工业出版社,2002:15-30.
[12] 郭卫栋.虚拟样机技术与ADAMS应用实例分析[M].北京:北京航空航天大学出版社,2007:25-35.
[13] 王德胜,孔德文,赵克利.机械式矿用挖掘机钢丝绳在MSCADAMS中的建模方法[J].计算机辅助工程,2006,15(21):364-366.
[14] 韩占忠,王敬,小平.Fluent流体工程仿真计算实例与应用[M].北京:北京理工大学出版社,2007:10-30.
(责任编辑: 康锋)
Analysis of Release Stability of Oceanographic Testing Device Based on Adams and CFD
YUHaibo,DONGJunkui,LIUYisheng
(Faculty of Mechanical Engineering & Automation, Zhejiang Sci-Tech University, Hangzhou 310018, China)
The paper used Adams software to establish a simulation model for the release of ocean observation device to study the observation device before entering the water dynamics in different sea conditions and the speed of cloth, and obtain the velocity and acceleration of the device. The paper used CFD fluid dynamics analysis software, the three-dimensional fluid analysis model was established and the hydrodynamic characteristics of the fluid were studied. The speed and angle of the device to be inserted into the sea floor are obtained. Motion simulation results of two parts before and after water entry show: the whole release process of the marine observation device can be safely and stably carried out and sampling spear rod can be inserted into the seabed. It provides a theoretical basis for the protection of the test components and the mechanical structure of the device and the final release of the ocean. It provides a theoretical reference for the design and manufacture of marine test equipment.
oceanographic testing device; release; stability; Adams; Fluent
10.3969/j.issn.1673-3851.2016.09.018
2016-06-21
国家高技术研究发展计划(863计划)(2012AA09A404)
余海波(1990-),男,浙江湖州人,硕士研究生,主要从事机构设计和稳定性仿真方面的研究。
刘宜胜,E-mail:lysleo@zstu.edu.cn
TP23
A
1673- 3851 (2016) 05- 0742- 07 引用页码: 090405
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
海洋通报(2022年2期)2022-06-30
军事护理(2022年4期)2022-05-08
陶瓷学报(2021年5期)2021-11-22
海洋石油(2021年3期)2021-11-05
河北环境工程学院学报(2021年1期)2021-03-19
装备制造技术(2020年3期)2020-12-25
空间科学学报(2020年6期)2020-07-21
太空探索(2016年6期)2016-07-10
船海工程(2015年4期)2016-01-05
