
交流电机控制与MATLAB仿真软件结合的教学实例探讨
2016-09-27 00:06魏尚北牛超
求知导刊 2016年20期
关键词:仿真教学
魏尚北+牛超
摘 要:矢量控制是交流调速理论中最抽象、最重要的内容之一,本文根据目前交流电机控制教学中存在的问题,将MATLAB仿真技术运用到交流电机矢量控制系统教学中,通过对各个单元模块的仿真建模,把抽象的理论知识分解成对各个模型的认识,使得一个复杂系统的输入、输出以及控制变得简单、直观,从而实现生动形象地引导学生理解矢量变频调速原理,提高教学质量的目的。
关键词:MATLAB;仿真教学;交流电机矢量控制
一、引言
交流调速系统是电机学、电力电子学、微电子学、自动控制理论等多学科交叉应用的一门学科。传统教学方法一般按照原型电机、坐标变换、磁场定向的矢量控制思路进行讲授, 这种传统的教学方法理论性强,难度大,致使学生难以理解和掌握相关内容。此外,利用实验平台学习和研究矢量控制知识,存在实验装置有限、实验平台对学生的编程能力要求较高、坐标变换、矢量控制的思想也不够直观等问题。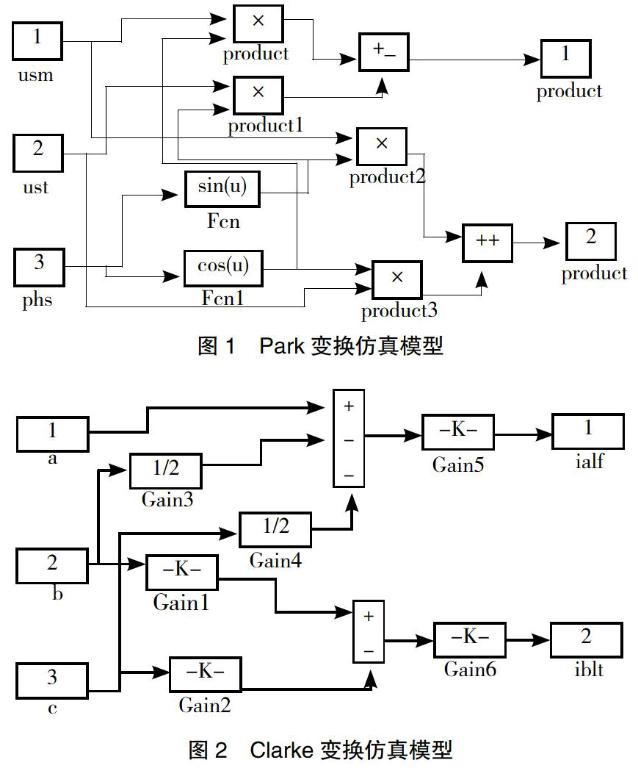
利用MATLAB软件可非常容易地构建虚拟与实际相符合的实验平台,使得复杂系统的输入、输出及控制变得相当简单和直观,从而生动地引导学生理解矢量控制原理,激发学生学习兴趣,提高教学质量。
二、交流电机矢量控制的原理
交流电机矢量控制的原理是由交流电机坐标变换理论,通过3s/2r静止和旋转变换,获得等效成同步旋转坐标系下的直流电机,再通过模仿直流电机的控制方法,求得直流电机的控制量,最后经过相应的坐标反变换,重新获得三相输入电流(或电压),从而控制感应电机。
三、教学与仿真软件的结合
由矢量控制原理可知,交流电机矢量控制变频调速包含了坐标变换、控制器、变频电源、速度检测等相关单元,系统相对复杂,学习起来较困难。MATLAB软件Sim-Power Systems模型库中包含常见的电源、电力电子器件模块、电机模块及相应的驱动和控制测量模块,将这些图形模块应用到交流电机矢量控制调速仿真,能够简化编程工作,方便对模型的描述。
1.坐标变换模块仿真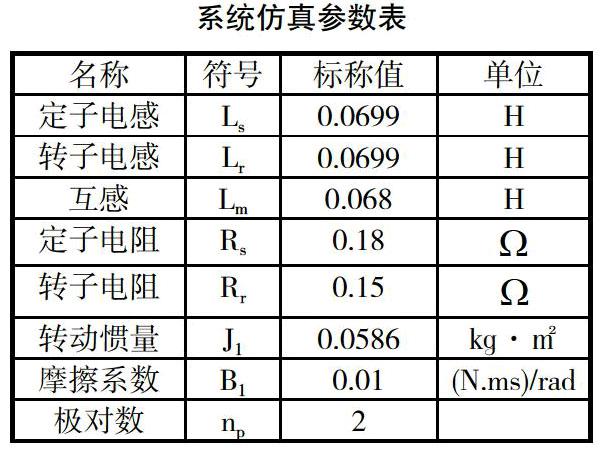
矢量控制坐标变换主要包含Clarke变换和Park变换,学生对这种坐标变换难以理解。因此可利用实际平台进行坐标变换,从而提高学生的编程能力。在Simulink环境下,只需找到相应的功能模块,手动拖动库中的功能模块,将其放在新建的文件中,将其连接起来,并按照要求修改各元器件的参数即可。如图1、图2所示建立的Park变换和Clarke变换仿真模型。
2.变频电源模块仿真
交流电机矢量控制的变频电源模块主要包含空间矢量脉宽调制模块和IGBT模块,其实现主要包含以下三步:首先判断参考向量Uref所处扇区。其次计算基本空间电压向量的作用时间,最后确定电压空间向量的切换点,从而形成PWM波。[1]
3.交流电机矢量控制系统仿真模型
交流电机矢量控制系统采用双闭环控制,转速环和电流环为PID控制器, 整个系统分为5个独立的功能模块[2]: 控制器模块、交流电机本体模块、坐标变换模块、空间矢量脉宽调制模块、IGBT模块和磁链观测模块。
四、教学内容仿真实验
交流电机控制系统的仿真模型建立以后,就可以进行课程内容的验证性实验,实验中各个环节的动态过程在示波器上能够形象地展示出来,方便学生通过图形理解交流电机矢量控制。感应电机的参数如表所示。仿真波形如图3、图4所示。
由仿真波形图可看出,所建立的模型与实际系统相符合,从系统速度响应曲线可以看出该系统具有良好的调节性能,同时学生通过观测波形图,可以更好地理解和掌握交流电机矢量控制系统知识。
MATLAB仿真在交流电机矢量控制教学中的应用,能使抽象、模糊的理论知识变得清晰和容易理解,并且在模型建立的过程中,仿真方案的设计和问题的排除也是对学生创新思维的一种锻炼。
将仿真技术引入到课堂,将理论教学与仿真实验手段相结合,能为交流电机矢量控制的教学提供一种新的手段。
参考文献:
[1]贾民力,张金霞,樊 明,等.基于SIMULINK异步电动机SPWM控制的动态仿真[J].青海师范大学学报(自然科学版),2012,(3): 34-39.
[2]魏祥林,王晓兰,周启华.基于SIMULINK的“异步电机矢量控制变频调速”辅助教学[J].中国电力教育,2011,(9):189-192.
猜你喜欢
科教导刊·电子版(2017年3期)2017-03-12
东方教育(2016年14期)2017-01-16
东方教育(2016年4期)2016-12-14
数字技术与应用(2016年9期)2016-11-09
科教导刊·电子版(2016年22期)2016-11-02
大学教育(2016年7期)2016-07-27
科技视界(2016年15期)2016-06-30
电脑知识与技术(2016年2期)2016-03-22
教育教学论坛(2015年33期)2015-12-10
教育教学论坛(2014年9期)2014-10-08
