基于实测数据的交叉路口广义力模型改进
2016-09-23 06:15张蓉蓉郑永安史忠科
系统工程学报 2016年1期
张蓉蓉,郑永安,史忠科
(西北工业大学自动化学院,陕西西安710129)
基于实测数据的交叉路口广义力模型改进
张蓉蓉,郑永安,史忠科
(西北工业大学自动化学院,陕西西安710129)
为了更准确的描述道路交叉路口车辆的跟驰行为,在广义力模型的基础上,提出了改进模型.改进模型去掉了Heaviside函数的影响,添加了两车速度差和车间距的高次项对后车加速度影响的补偿项.实验所用的数据是通过Matlab软件处理在西安市边家村实际道路交叉路口所拍摄的车辆跟驰视频中获得的.用实测数据分别对广义力模型和改进模型进行仿真验证实验并对实验结果进行了对比分析,结果表明改进模型能更好地描述实际道路交叉路口的车辆跟驰行为.
交通流;广义力模型;交叉路口;优化速度函数
1 引 言
城市交通系统是一个复杂庞大的系统,其复杂性在于车辆之间存在复杂的相互作用,主要表现在交通拥堵等方面.交通拥堵是当今社会发展亟待解决的问题,对交通流模型的研究,特别是交叉路口交通流模型的研究,对城市交通的控制以及交通拥堵问题的缓解具有十分重要意义[1-3].车辆跟驰行为是车辆间相互作用的最基本的驾驶行为,对跟驰模型的研究,可以更好地实现对交通流的调控.
跟驰理论是研究微观交通流问题的主要方法,已经取得了很多进展.Bando等于1995年提出了优化速度模型(optimal velocity model,OV模型),OV模型解决了Newell模型的无限加速的问题[4,5].Helbing和Tilch 于1998年利用实测数据对OV模型利进行辨识,结果表明OV模型会产生过高的加速度以及不切实际的减速度,并且可能出现车辆碰撞的现象.为了解决这些问题,Helbing和Tilch提出了GF模型,GF模型的思想为:前车速度比后车速度小的时候,应该考虑速度差对后车的影响[6].本文通过采集到的大量的实测数据对GF模型进行验证,发现该模型存在响应滞后、加速度过大以及与实测数据的偏差较大等问题.本文在验证GF模型的基础上,结合对实际路段驾驶行为的分析改进了GF模型,得到更能反映实际驾驶行为的车辆跟驰模型.
2 广义力模型
广义力(GF)模型如下

其中a=1/τ称为敏感系数;τ为前车司机的反应时间,λ是不同于a的系数;Δvk是两车的速度差;Δxk(t)是两车间距;xk(t)是后车t时刻行驶的距离;V(Δxk(t))是优化速度函数;H(x)是Heaviside函数,即单位阶跃函数.
优化速度函数V(Δxk(t))选取最常用的一种表达式,即

其中hc是车辆间的安全距离且为定值;vmax是车辆的最大速度[7],根据我国城市区域内车辆的速度限制在40km/h以内,因此,在仿真验证实验中取vmax=10m/s.
验证GF模型的数据来源于2013年3月和5月在西安市边家村交叉路口拍摄的车辆跟驰视频,数据处理流程为:1)在拍摄的视频中截取容易分辨车辆跟驰行为的视频段;2)用Matlab程序把视频段截成帧图像;3)手动读取图像中车辆的坐标,用直接线性变换得到车辆的实际坐标;4)用1stopt回归软件进行多项式拟合,得到位移随时间变化的曲线,求导可得到车辆行驶的速度.
其中线性变换的过程为:建立如图1中所示的坐标系,根据实际道路中车道线白线实际长为2m,宽度忽略不计;白线间纵向间距实际为3.8m,横向间距为3.8m.读取可视范围内的四个点坐标以及其对应的实际坐标.用直接线性变换解法,得到实际的距离[8].基本关系式如下

其中x,y分别表示图像中车辆的坐标;X,Y分别表示建立坐标系后,车的实际坐标(因为是平面图像,Z为0).
式(3)展开得到以li为未知数的方程,当有n个控制点时,可列出2n个方程式,写为矩阵的形式如下

其中A∈R2n×11为系数矩阵;L∈R2n×1为观测值矩阵,X∈R11×1,X的分量为未知数l1,l2,...,l11.
根据最小二乘法,由式(4)可求得未知数矩阵为

根据车道的实际数据,可以读到诸如(0,5.8)、(3.8,5.8)、(0,11.6)、(3.8,11.6)这些实际点的像素,代入式(5)就可以求出对应的实际坐标.得到实际点的像素之后,又变换了一次坐标系,把Y轴移到道路的中心,得到前车与后车距离原点的距离,然后对距离求导得到两车的速度.
模型的验证采用迭代思想,在t时刻两车位置及速度已知,在间隔时间T后,可以用式(6)和式(7)迭代出T+t时刻的后车速度和此刻的车间距[9,10],即


其中T表示每两帧间隔的时间,这里T=2/25 s;vk(t)为后车t时刻的速度;ak(t)为后车的加速度;vk(T+t)为后车T+t时刻的速度;vk-1(t)为前车t时刻的速度;vk-1(T+t)为前车T+t时刻的速度.
依据GF模型对读取的5组数据进行仿真,得到如图2~图6所示的后车速度和车间距的曲线.

图1 在图像中建立的直角坐标系Fig.1 Establishment of a cartesian coordinate system in the image

图2 第一组数据GF模型的后车速度和车间距曲线Fig.2 Following car speed and vehicle distance of GF model of 1st group
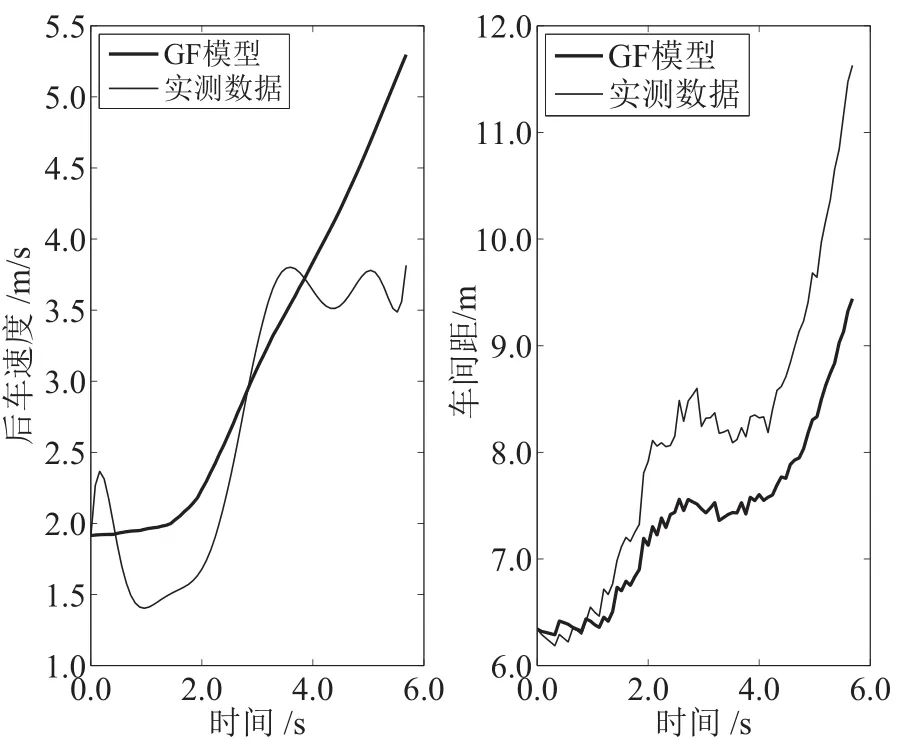
图3 第二组数据GF模型的后车速度和车间距曲线Fig.3 Following car speed and vehicle distance of GF model of 2nd group
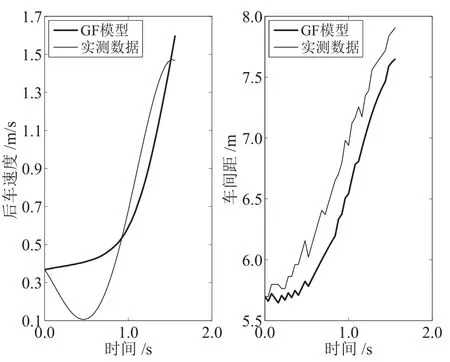
图4 第三组数据GF模型的后车速度和车间距曲线Fig.4 Following car speed and vehicle distance of GF model of 3rd group
对图2~图6中后车速度曲线的分析可以得到:图5几乎可以模拟出实测的后车的速度,误差较小;图2、图3、图4、图6与实际的数据相比存在响应滞后、瞬间加速度过大以及稳态误差较大的问题,并且随着时间推移,最终处于发散状态.
对图2~图6中车间距曲线的分析可以得到:图4、图5、图6中GF模型仿真的结果与实测的车间距数据刚开始时总体趋势一样,但在随着时间的增加,误差越来越大;图2、图3的GF模型仿真结果与实测的数据相比响应滞后且偏差较大,跟随的趋势也不符合,甚至会发散.
从实测数据的仿真实验结果可以看出,GF模型无论是从后车速度还是从车间距考虑都与实际交叉路口的情况有很大的差别,不具有普遍适用性.

图5 第四组数据GF模型的后车速度和车间距曲线Fig.5 Following car speed and vehicle distance of GF model of 4th group

图6 第五组数据GF模型的后车速度和车间距曲线Fig.6 Following car speed and vehicle distance of GF model of 5th group
3 改进模型及其与GF模型的对比
通过对GF模型的仿真验证实验可以看出,GF模型与实测的数据之间存在响应滞后和偏差较大的问题,不能准确描述交叉路口的车辆跟驰行为.其主要原因是:1)GF模型主要研究的是前车速度大于后车速度的情况,而当后车速度大于前车速度时并没有加以考虑,因此去掉Heaviside函数的影响;2)对GF模型的仿真结果分析,滞后的主要原因是GF模型的阶次较低,因此添加了两车速度差和车间距的高次项对后车加速度影响的补偿项.
改进后的模型如下

其中η=m1tanh[Δvk(t)]2/T2+m2tanh[Δxk(t)]2/T2,m1,m2分别为两项的系数.
对GF模型和改进模型进行仿真,得到如图7~图11所示的后车速度和车间距曲线.

图7 第一组数据两模型的后车速度和车间距曲线Fig.7 Following car speed and vehicle distance comparison between two models of 1st group

图8 第二组数据两模型的后车速度和车间距曲线Fig.8 Following car speed and vehicle distance comparison between two models of 2nd group
通过图7~图11的5组实验结果可以直观的看出,改进模型的仿真结果与实测的数据更接近,提高了响应速度,改善了原模型的滞后问题,减少了误差,能更好的描述交叉路口车辆的跟驰行为.
仿真得到的后车速度和车间距误差结果见表1和表2.
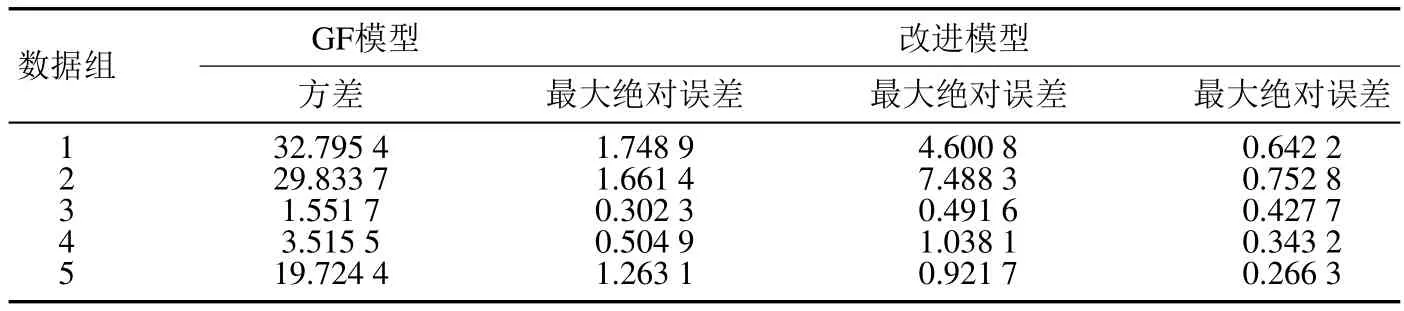
表1 两模型的后车速度误差对比Table 1 The error comparison of two models of following car speed
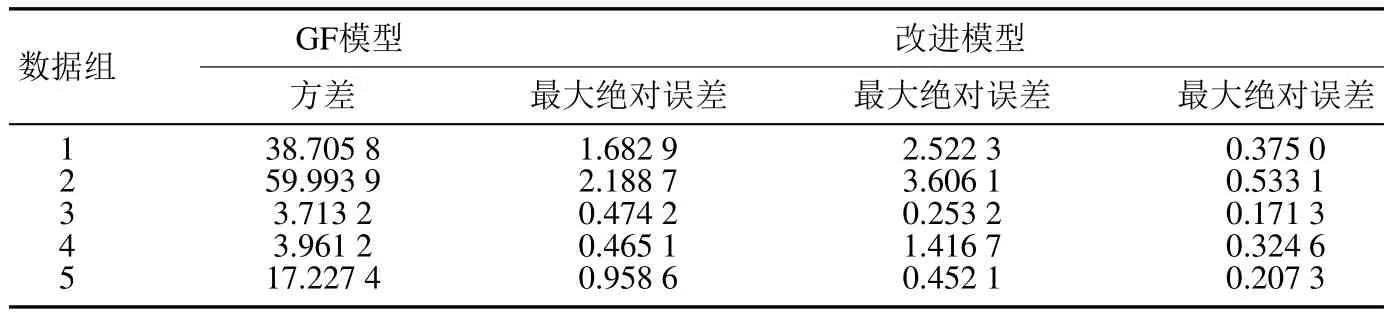
表2 两模型的车间距误差对比Table 1 The error comparison of two models of vehicle distance
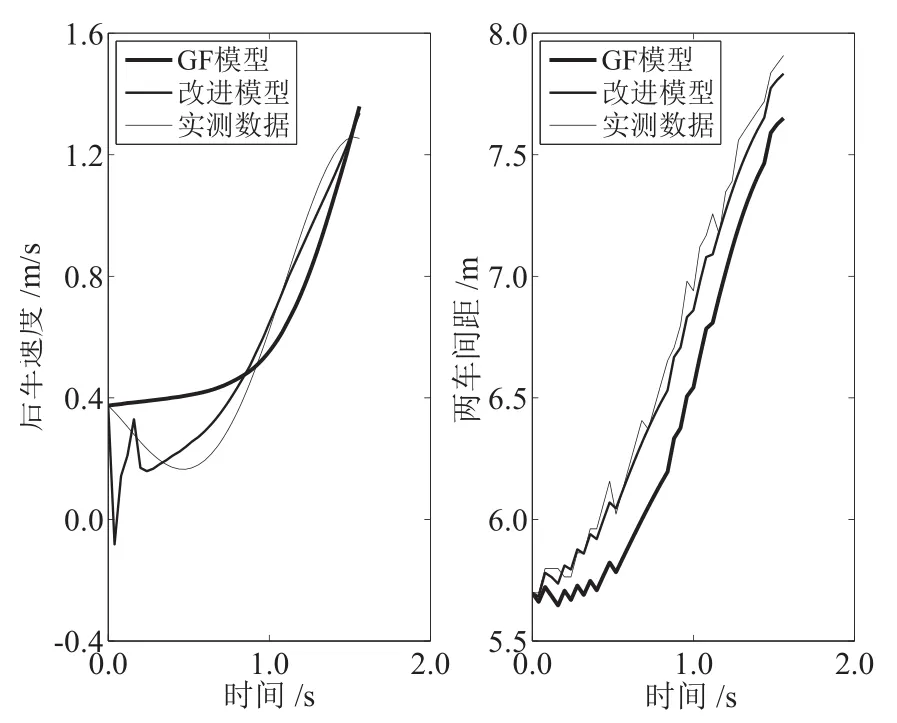
图9 第三组数据两模型的后车速度和车间距曲线Fig.9 Following car speed and vehicle distance comparison between two models of 3rd group

图10 第四组数据两模型的后车速度和车间距对比Fig.10 Following car speed and vehicle distance comparison between two models of 4th group

图11 第五组数据两模型的后车速度和车间距对比Fig.11 Following car speed and vehicle distance comparison between two models of 5th group
通过表1和表2中实验获得的数据可以看出,改进模型的后车速度与车间距的方差基本在2.0左右,最大绝对误差在0.8以内;GF模型的方差很大,最小的都接近4.0了,最大绝对误差也在2.0以上.由表1和表2的数据可以得出改进模型的误差比GF模型的误差要小很多,表明改进模型优于GF模型.从实验数据的仿真模拟结果图可以看出,改进后的模型与实际情况更相符,由于数据是在十字交叉路口不同时间段随机测试获得的,因此改进后的模型具有普遍适用性.
4 结束语
本文以城市交叉路口的跟驰模型为出发点,在验证GF模型的基础上,去掉了Heaviside函数的影响,添加了两车的速度差和车间距的高次项对后车加速度影响的补偿项,提出了改进模型.通过Matlab软件把实际读取的数据对GF模型和改进后的模型进行仿真验证,结果表明,改进模型比GF模型能更准确地描述实际交叉路口的车辆跟驰行为.
本文以GF模型为基础进行改进,提高了原模型的响应速度、降低了稳态误差等问题.但在模型验证时可以加以考虑驾驶行为的个体差异、车型大小以及对其他路段的可行性等因素,做进一步改进.
[1]史忠科,黄辉先,曲仕茹,等.交通控制系统导论.北京:科学出版社,2003. Shi Z K,Huang H X,Qu S R,et al.Introduction of Traffic Control System.Beijing:Science Press,2003.(in Chinese)
[2]蒋慧峰,陈森发.基于时不变综合系数的运输方式动力学模型.系统工程学报,2010,25(1):85–90. Jiang H F,Chen S F.Dynamic model of transportation modes based on time-invariant comprehensive coefficient.Journal of Systems Engineering,2010,25(1):85–90.(in Chinese)
[3]张发,宣慧玉,赵巧霞.速度差异混合交通流稳态特性与过渡特性.系统工程学报,2012,27(2):263–269. Zhang F,Xuan H Y,Zhao Q X.Characteristics of mixed traffic flow with different velocities in steady state and transient process. Journal of Systems Engineering,2012,27(2):263–269.(in Chinese)
[4]Jin S,Wang D,Tao P,et al.Non-lane-based full velocity difference car following model.Physica A,2010,389(21):4654–4662.
[5]Peng G H,Sun D H.A dynamical model of car-following with the consideration of the multiple information of preceding cars. Physics Letters A,2010,374(15):1694–1698.
[6]Zhao X,Gao Z.A new car-following model:Full velocity and acceleration difference model.The European Physical Journal BCondensed Matter and Complex Systems,2005,47(1):145–150.
[7]Zhang J,Li X,Wang R,et al.Traffic bottleneck characteristics caused by the reduction of lanes in an optimal velocity model.Physica A,2012,391(7):2381–2389.
[8]Wibirama S,Tungjitkusolmun S,Pintavirooj C.Dual-camera acquisition for accurate measurement of three-dimensional eye movements.IEEJ Transactions on Electrical and Electronic Engineering,2013,8(3):238–246.
[9]李迎峰,史忠科,周致纳.基于时变期望车距与最大车速的跟驰模型.交通与计算机,2008,26(3):1–4. Li Y F,Shi Z K,Zhou Z N.Car-following model based on time-variable expectation-headway and maximal velocity.Computer and Communications,2008,26(3):1–4.(in Chinese)
[10]Newell G F.A simplified car-following theory:A lower order model.Transportation Research,Part B:Methodological,2002,36(3): 195–205.
Improvement of GF model in intersections based on actual data
Zhang Rongrong,Zheng Yongan,Shi Zhongke
(School of Automation,Northwestern Polytechnical University,Xi’an 710129,China)
In order to describe the car-following behavior of the intersections more accurately,on the basis of generalized force(GF)model,an improved model was proposed.Compared with the GF model,the improved model removed the influence of Heaviside function and added the influence of the higher order terms of speed difference and vehicle distance on the following car’s acceleration as the compensation.The real-measured data used in the experiment were obtained by Matlab software from the video taken at the intersection near BianJia village in Xi’an City.The real-measured data were used for GF model and the improved model to simulate respectively.Results were analyzed,which showed that the improved model is much better than the GF model in describing the car-following behavior at the intersections.
traffic flow;GF model;intersection;optimal velocity function
TP273
A
1000-5781(2016)01-0111-06
10.13383/j.cnki.jse.2016.01.011
2013-10-09;
2015-04-20.
国家自然科学基金重点资助项目(61134004)
张蓉蓉(1988—),女,山西临汾人,硕士生,研究方向:交通图像处理,Email:zhangrong1004@126.com;
郑永安(1963—),男,陕西凤翔人,博士,教授,研究方向:飞行控制与导航,智能交通系统,Email:zhengyongan@nwpu.edu.cn;
史忠科(1956—),男,陕西宝鸡人,博士,教授,研究方向:非线性控制,飞行控制与导航,交通系统,交通检测、估计与防撞规划,Email:shizknwpu@126.com.
猜你喜欢
智能制造(2021年4期)2021-11-04
石油沥青(2019年2期)2019-04-28
小学生学习指导(中年级)(2018年11期)2018-11-29
新传奇(2018年16期)2018-05-14
农村农业农民·B版(2018年11期)2018-01-28
中国老区建设(2016年12期)2017-01-15
人民交通(2016年5期)2017-01-05
汽车文摘(2015年1期)2016-01-13
汽车文摘(2015年11期)2015-12-14
汽车文摘(2015年11期)2015-12-02