含间隙结构的襟翼动力学仿真
2016-09-22 09:30陈炎
中国科技信息 2016年11期
陈 炎
科学评价
含间隙结构的襟翼动力学仿真
陈 炎
本文针对某型飞机襟翼收放机构,提出含间隙的机构运动副模型的观点。在民机研制行业起到优化详细设计的作用。
如付诸现实将产生减少研制周期,减少试验投入的经济效益。
襟翼作为飞机增升装置之一,在飞机起飞着陆过程中起着重要作用。传统襟翼运动模型对机构运动副间隙进行理想化处理,忽略了间隙对运动的影响。本文以某型飞机外襟翼运动机构为研究对象,根据机构中含有的运动副模型,选用合理的接触碰撞模型,并利用LMS Virtual.Lab Motion建立考虑运动机构间隙的襟翼运动机构刚柔耦合仿真模型,在此基础上,对襟翼运动机构运动副在不同间隙下的动力学特性进行分析。分析结果显示机构运动副的间隙对驱动影响较大,选择合理的运动副间隙值可以改善内外侧机构驱动力矩差值大的现象。
飞机襟翼作为现代大型飞机增升装置之一,是飞机的重要组成部分。在飞机起飞和着陆时起到增升、增阻的作用,以提高飞机的气动性能,缩短飞机起降滑跑距离。为了实现襟翼的正常收放,常用襟翼运动机构主要有以下几种类型:铰链式,“四连杆机构”式和滑轨-滑轮架式。由于滑轨-滑轮架式机构具有富勒运动效果好、整流罩高度低和宽度窄的优点,其性能及效果更好, 在大型客机中得到了广泛的应用。
滑轨-滑轮架式机构主要由整体滑轨、滑轨面、滑轮架、滚轮等零件组成,滚轮在滑轨的约束下沿滑轨相对运动。为了保证良好的气动特性,襟翼要在起飞及着陆时运动到预定的卡位。由于设计及加工的限制,机构运动副之间存在的间隙会使构件产生附加运动,从而影响了机构的运动精度;同时,在滚轮与滑轨发生相对运动过程中,两者之间的间隙若不合理,会发生滚轮与滑轨间过度磨损,滑轨断裂和卡阻等现象,这些现象都可能会导致飞机在起飞或着陆阶段襟翼机构不能正常收放,增加了飞行的不安全性。鉴于上述原因,运动副间隙对襟翼运动的影响难以忽视,研究含运动副间隙的襟翼机构的运动学和动力学模型具有重要的意义。
本文以某型飞机外襟翼运动机构为研究对象,利用LMS Virtual.Lab Motion建立考虑运动机构间隙的襟翼滑轨-滑轮架式运动机构刚柔耦合仿真模型,在此基础上,对襟翼运动机构在不同间隙下的动力学特性进行分析。
含间隙的襟翼动力学模型分析
在分析含间隙的襟翼机构动力学问题时,通常采用机构接触碰撞模型。接触碰撞模型一般可以采用拉格朗日乘子法或者惩罚函数法,综合考虑滚轮与导轨面之间作用关系,本文采用惩罚函数法近似模拟滚轮与导轨面之间相互作用力,其中包括法线接触力和切向接触力。
法线接触力采用非线性等效弹簧阻尼模型作为接触力的计算模型,模型由两部分构成,一部分是由两个零件之间的相互切入而产生的弹性力,另一部分是由于相对速度而产生的阻尼力,其表达式为:

其中:Fk表示等效弹性力,Fd为等效阻尼力,Kn表示等效接触刚度,m表示变形指数。δ表示接触点法向穿透深度;表示接触点法向相对速度;C(δ)表示与δ有关的阻尼函数。
由于滚轮与导轨面是线接触,对于线接触模型,可以根据Palmgren线接触趋近量计算公式进行定义:

其中L为线接触长度,η为两接触物体的综合弹性常数,其中E1,E2为两种接触材料的弹性模量,µ1,µ2为两种接触材料的泊松比,m=10/9。
其中阻尼系数函数采用step函数,表达式为:

其中δmax是用户自定义的最大穿透量,cmax为用户自定义的最大阻尼回复系数,根据材料的特性选定。
切向接触力模型采用库伦摩擦模型,摩擦力的公式为:

其中μ是摩擦系数,由于传统的库伦摩擦力模型在切向速度方向发生改变时,摩擦力会发生突变,造成微分方程数值积分的不稳定,因此LMS Virtual.Lab Motion引入双曲正切曲线函数改善数值稳定性:

其中:µ*是计算摩擦系数;是切向速度;ve是过渡速度。
外襟翼收放动力学建模及仿真
柔性体与气动力建模
使用有限元软件利用部件模态综合法计算零件模态,除少数杆件等简单零部件外,柔性体部件提取了至少前20阶模态,并根据经验数据对柔性体加了适当的阻尼,导入LMS Virtual.Lab Motion替代刚体零件并按照实际运动规律建立约束,由于本文重点研究滚轮与滑轨间隙对模型的影响,所以除滚轮与滑轨外的运动副都设置为理想运动副。外襟翼的飞行姿态会根据飞行状态的不同而发生变化,由于飞行状态的不同,气动力的大小和方向也发生变化。根据得到的外襟翼在飞机起飞状态、复飞状态和着陆状态的气动力加到仿真模型中。建成的仿真分析模型如图1所示。

图1 襟翼运动机构动力学仿真模型
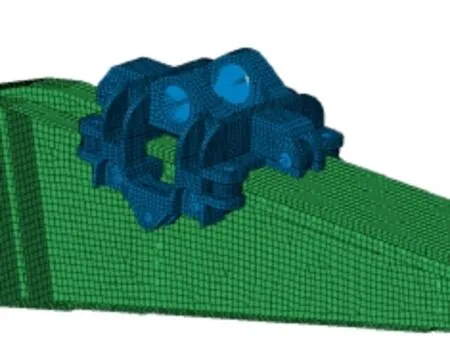
图2 滚轮与滑轨的接触建模
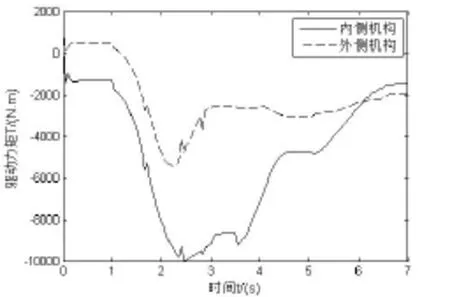
图3 不考虑间隙时驱动力矩随时间变化曲线
滚轮与滑轨的接触建模
对于滑轨-滑轮架式机构,滑轨前部与机翼结构通过螺栓进行固接;襟翼与滑块相连,滑块在摇臂的作用下沿着滑轨后部的斜面运动,进而带动襟翼做收放运动,滑块上的10处滚轮与滑轨接触,限制滑块的运动自由度。
在LMS Virtual.Lab Motion中接触可处理为可变形面与可变形面的接触,该方法适合一直保持接触或者间隙较小的类型,并且适用于可变形面之间的接触,选用Lab Motion中的The Rectangular Patch生成可变形面。采用Lab Motion中Flexible-to-Flexible Contact Force来模拟可变形面到可变形面碰撞接触,主可变形面选择导轨面上与该滚轮发生接触的可变形面,共有5个接触面,需提取五个接触面的有限元网。从可变形面选择10个滚轮。接触类型选择考虑阻尼的线性接触。建立的接触模型如图2所示。
仿真结果分析
为了真实的模仿活动面各个部件运动和受力状态,必须对每个部件的运动和受力进行时序控制。本项目根据需要仿真共进行7秒,每一时刻的状态如下:0~1s外襟翼保持巡航下状态,各个部件达到平衡状态;1~3s外襟翼由巡航状态运动到起飞状态;3~3.5s外襟翼保持起飞状态;3.5~4.5s外襟翼由起飞状态运动到复飞状态;4.5~5s外襟翼保持复飞状态;5~6.5s外襟翼由复飞状态运动到着陆状态;6.5~7s外襟翼保持着陆状态。
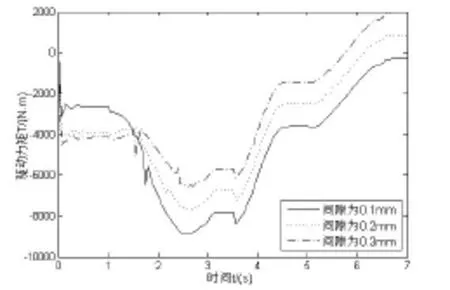
图4 不同间隙下内侧机构驱动力矩随时间变化曲线

图4 不同间隙下外侧机构驱动力矩随时间变化曲线
当不考虑间隙时对仿真模型添加驱动进行控制,得到的襟翼内、外侧曲柄驱动力矩如图3所示。从图中可以看出,内侧机构驱动力矩所需较大,最大时为10000N.m左右,外侧机构驱动力矩最大值为4800N.m左右,两者都是在2.4s时达到最大值。
保持外侧机构间隙保持不变,调整内侧机构的间隙,图4为不同间隙下内侧机构的驱动力矩变化,图5为外侧机构的驱动力矩变化。可以看出间隙越大,内侧最大驱动力矩越小,由于内侧和外侧最大力矩之和保持不变,所以为了两者最大力矩数值相近,防止其中一个过大而导致卡死,理想内侧间隙值为0.2mm左右。
结语
本文以某型飞机外襟翼运动机构为研究对象,利用接触碰撞模型建立了含间隙的机构动力学方程。通过动力学软件LMS Virtual.Lab Motion建立考虑运动机构间隙的襟翼运动机构刚柔耦合仿真模型,在此基础上,对襟翼运动机构在不同间隙下的动力学特性进行分析,分析结果显示机构间的间隙对驱动影响较大,可以通过改变运动副间隙值改善内外侧机构驱动力矩差值大的现象。

陈 炎
上海飞机设计研究院
陈炎,男,硕士研究生,上海飞机设计研究院结构部,主要研究方向为襟翼机构设计。
10.3969/j.issn.1001-8972.2016.11.015
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
港口装卸(2022年3期)2022-07-06
设备管理与维修(2021年23期)2021-02-10
民用飞机设计与研究(2020年4期)2021-01-21
科学技术创新(2020年5期)2020-06-03
冰雪运动(2019年2期)2019-09-02
中国设备工程(2019年12期)2019-08-05
兵器装备工程学报(2018年7期)2018-07-31
汽车零部件(2017年6期)2017-07-25
阅读(中年级)(2016年11期)2017-01-23