基于高性能嵌入式平台的人体运动目标跟踪技术研究
2016-09-21 06:09:15崔杰徐从体
山东农业大学学报(自然科学版) 2016年4期
崔杰,徐从体
蚌埠医学院体育艺术部,安徽蚌埠233030
基于高性能嵌入式平台的人体运动目标跟踪技术研究
崔杰,徐从体
蚌埠医学院体育艺术部,安徽蚌埠233030
随着计算机图像处理方法的飞速发展,图像目标跟踪系统在工业、安防、人体运动检测等领域得到越来越广泛的应用。本文设计并实现了基于TI公司高性能达芬奇片上系统(SoC)的实时图像采集、处理、显示和网络传输等功能的嵌入式图像处理,并针对高斯背景建模的改进算法,提出一种基于光流的Mean-Shift核带宽估计算法,实现了对人体运动目标的准确跟踪。
目标跟踪;人体运动检测;嵌入式图像处理
随着近20年来光电传感器技术的长足发展以及计算机速度和容量的大幅提升,越来越多的理论研究变成了现实产品,极大了提高了生产效率、生活质量以及国防装备水平[1]。作为计算机视觉领域的一个研究分支,计算机图像目标跟踪具有较强的实用性,全世界科研工作者在这个领域做了大量的工作。近几年来,嵌入式图像处理产品已经广泛应用于安全防卫、工业以及农业生产监控、交通监控以及国防科技等多个方面[2]。因嵌入式图像处理平台具有很大的实际意义和应用价值,基于此,本文对嵌入式高性能图像处理平台做了较为深入的研究,设计并实现了基于TI公司DM 6467T的身体运动目标跟踪系统。
1 硬件电路设计
1.1图像编解码模块设计
为了便于本系统与高清液晶监视器直接连接从而监控系统工作,本系统视频输出直接采用HDM I接口输出。接口将DM 6467T输出BT.1120格式数据流转换成HDM I数据流[3]。因此,在显示电路设计时,采用专用于HDM I显示的具有高性能HDM I编码芯片Sil9134可以将视频输出到外部监视器上直接显示。将输出信号经过90欧姆差分阻抗匹配电路后,即可直接将信号输出到监视器上实现图像显示功能。
1.2千兆以太网接口模块设计
本系统的千兆以太网络模块设计是基于DM 6467T的EMAC模块[4]进行扩展设计的。DM 6467T片内外设已经集成了10/100/1000M网络数据链路层,通过GM II接口连接外部的网络物理层。因此,在EMAC接口挂接一个支持GM II型接口的网络物理层芯片,并经过网络变压器和RJ45接口即可实现10/100/1000M网络的数据通讯功能。本文跟踪系统图像输入即采用AVT公司的GC660高速GigE摄像头。
1.3第二代双倍速同步动态存储器(DDR2-SDRAM)模块设计
DDR2-SDRAM[5]中,在激活一行后,需要等待tRCD个时钟周期然后才可以进行读写操作,而预充电指令需等待tRAS个周期。而tRC是同一个槽从前一次激活指令到后一次激活指令之间需要最小的等待周期,tRRD是不同槽从前一次激活指令到后一次激活指令之间需要最小的等待周期。操作存储芯片时需要严格遵守其时序参数,如果不按照要求操作可能会导致数据错误或者根本无法访问存储器。
如式所示,定义存储器效率函数:


tPr ech arg eAll为tRP以及tRAS的时间总和。这部分效率损失大约只有1%左右,占到整个动态同步随机存储器效率损失的极小一部分,而且控制器可以同时对多个槽轮流发送刷新指令,减少冲突可能,进一步提高效率。
1.4系统监控以及低速通讯模块设计
本系统采用了实时操作系统RT-Thread用来做任务管理。RT-Thread实时操作系统核心是一个高效的硬实时核心,它具备非常优异的实时性、稳定性、可剪裁性,内核体积可以小到3 k Rom占用、1 k Ram占用[6]。一共设计了四个进程,按照它们的优先级排列分别是:电压监控进程、CAN总线守候进程、红外通讯守候进程、开机初始化进程。
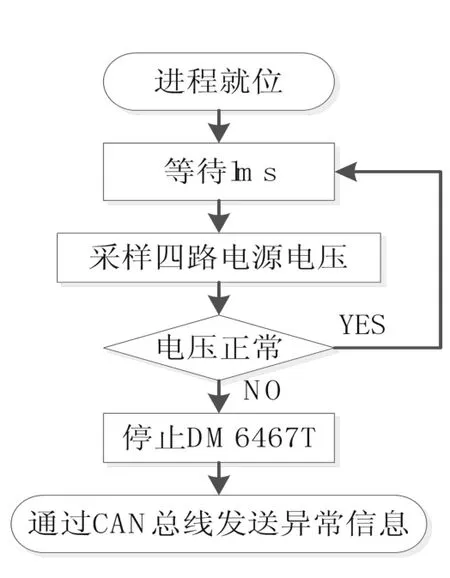
图1 电压监控进程流程图Fig.1M onitoring process for voltage
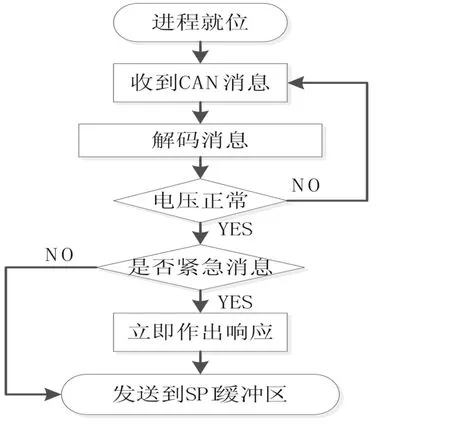
图2 CAN总线守候进程流程图Fig.2Waiting process of CAN bus
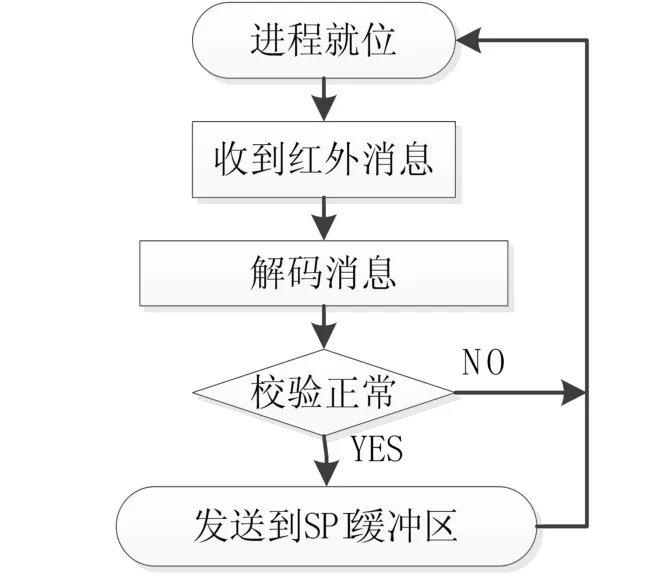
图3 红外通讯守候进程流程图Fig.3Waiting process of infrared communication
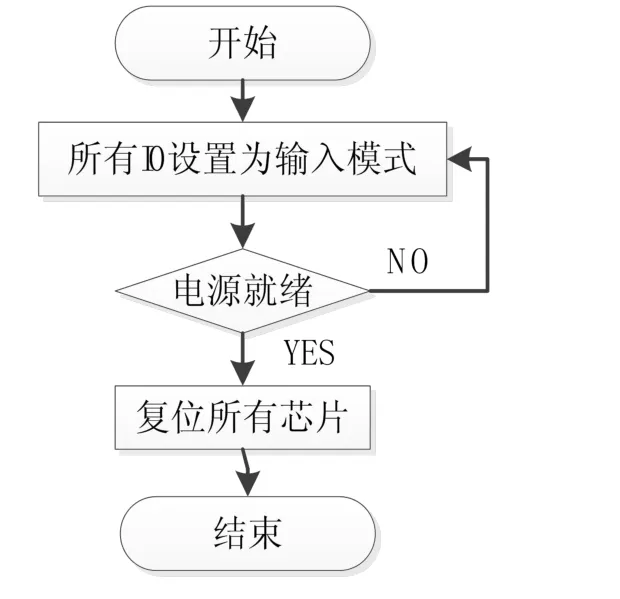
图4 开机初始化进程流程图Fig.4 Initialprocessof boot
1.5多层高速电路PCB设计
由于本系统功能和接口比较多,因此根据布局需要,确定PCB尺寸为:187*137mm。布局上,以DM 6467T为核心,本着方便的原则,将视频输入输出接口等需要经常插拔的接口放置上PCB上方,将低速接口以及调试接口放置在下方。同时,本系统处理核心芯片为BGA封装,共有529个引脚。引脚信号密度非常高,因此采用6层PCB板进行设计。
本系统上有大量的高速信号,在设计PCB时必须考虑阻抗匹配问题。在PCB设计中,分别是微带线与带状线。两种模型其阻抗计算公式分别为(3)与(4)。
对于微带线计算,其阻抗为:

对于带状线,其阻抗为:

式中的εr为介电常数,主要同PCB的材料有关,外界的温度、湿度等对其影响不大。
2 基于高斯混合模型的运动目标检测算法
2.1改进混合高斯模型(IGMM)的运动检测算法
2.1.1混合高斯模型(GMM)
假设有一组在维度为d的空间内的点xi,i=1…n,若这些点的分布近似于椭球状,可以用高斯密度函数g(x;µ;∑)来描述其概率密度分布:

其中µ为密度函数的中心点,∑代表这个概率密度函数的协方差矩阵,其数值决定了概率密度函数的形状、宽窄以及走向。
在图像中利用单高斯分布并不能表征图像中某一像素特征的分布情况,将每一个像素都用K个高斯分布的组合来建模。某个像素点在N时刻像素值为NX的概率为:

其中wj为第k个高斯分量的权值,(xN;θj)为第k个分量的高斯分布:

在式(7)中K个∑k为第K个分量的协方差矩阵,这个高斯分布序列按照他们的适合度wk/σk来排序,从中挑选B个适合度最大的高斯分布来进行背景建模。B由下式可得到:

其中T为阈值,其值由背景在整个图像序列中出现的概率决定,式(6)中的wj需要满足:

2.1.2混合高斯模型学习系数更新方法在模型的更新中,学习系数α起到了非常关键的作用,在处理每一帧图像的时后,学习系数参与到模型中均值、标准差以及权重系数的更新。定义匹配失败率CF计数为:

每一次用被测试像素点来匹配模型的时,都记录下其失败与否。设置一个时间间隔为5帧,每5帧后据匹配失败率的大小来调整学习系数,做一次学习系数更新。
3 基于光流的M ean-Shift核带宽自适应估计算法
3.1基于光流的带宽估计
光流法是对图像的运动场进行估计,将相似运动矢量合并形成运动目标检测的方法[7]。它主要利用灰度的变化信息,能够从图像序列的灰度变化中计算速度场,还可以利用一些约束条件从速度场中推出运动参数和物体结构[8]。光流计算进行像素级运动估计,主要基于亮度恒常性假设。在u,v组成的二维空间中,光流基本方程定义了一条约束直线,在直线上的所有u,v均可以满足(11)式,这是一个病态方程,需要引入额外的约束才能求得其解。

3.2算法描述
(1)在第i帧选定目标,得到初始跟踪窗口iW;
(2)计算图像光流场,进行光流聚类;
(3)对目标区域进行轮廓提取,利用随机采样一致法获取目标带宽;
(4)如果计算完成,更新Mean-Shift带宽,如果没有完成,则沿用上一步带宽;
(5)采用Mean-Shift算法,获取目标新的位置;
(6)令i=i+1,转到步骤1;
3.3身体运动目标跟踪实验结果及分析
视频序列采用YCbCr颜色空间,其分辨率为1280*720,对每一个色彩分量做8级量化,共有8*8*8个特征。图5和图6中,从(a)到(c)分别是第11,57以及159帧处的人体运动目标跟踪效果图;图5中,在第57帧处,对照算法跟踪误差开始增大,到第159帧可以看出,对照算法跟踪窗已经移出人体运动目标,跟踪失败。而图6中,本文算法可以一直有效的跟踪人体运动目标。
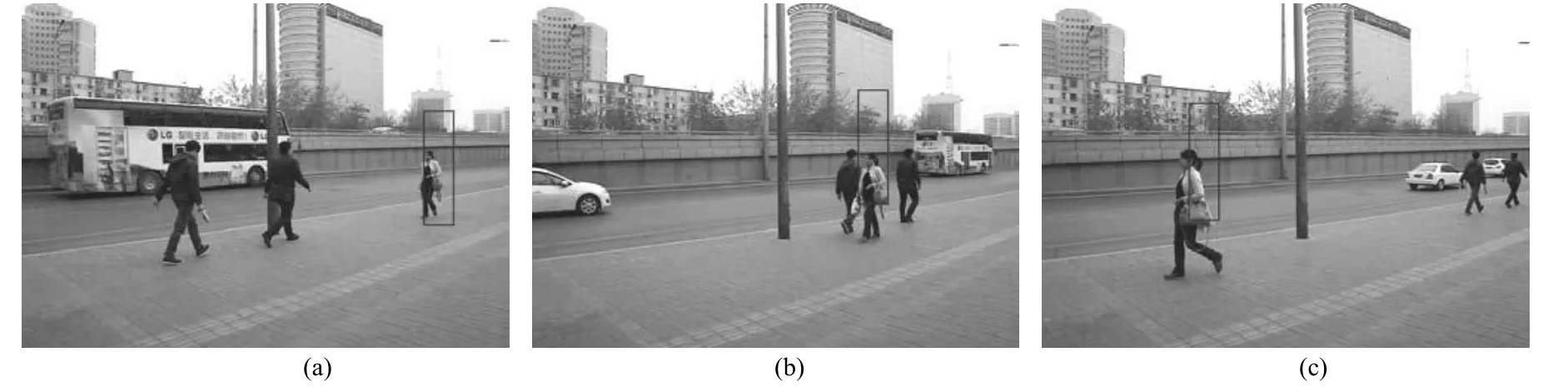
图5 固定核带宽算法实验视频第11,77,159帧的人体运动目标跟踪效果Fig.5Theobject tracking effectofhumanmotion at frames11,77,159 in videowith fixed kernelbandwidth algorithm

图6 跟踪算法实验视频第11,77,159帧的人体运动目标跟踪效果Fig.6Theobject tracking effectofhumanmotion at frames11,77,159 in videow ith trackingalgorithm
图7是实验结果,采用高斯核函数,在视频序列初始时,通过人体运动目标为跟踪对象,其坐标(420,20),选取核带宽为20个像素。由跟踪效果图可见,固定核带宽函数的跟踪算法,随着目标尺寸逐渐变大,跟踪窗口趋于目标的一个局部,跟踪窗口中心偏离目标中心。而本文算法可以调整跟踪核带宽,较为准确跟踪了人体运动目标尺度的变化,跟踪精度有较多提高,可以应用于常规视频中人体运动目标的跟踪。
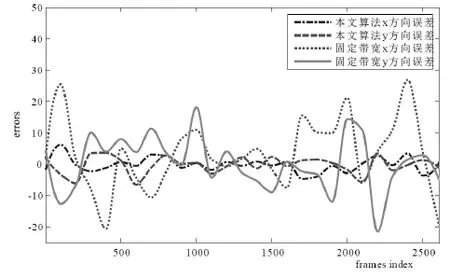
图7 固定和带宽算法实验视频人体运动目标跟踪BH系数Fig.7 BH coefficient of humanmotion tracking in videow ith fixed and bandw idth algorithm s
4 结论
通过分析国内外嵌入式图像跟踪系统的优缺点,结合本实验室的特点确定了系统总体功能和方案设计,并进行了性能指标的分析和可实现性分析。在此基础上,本文研究了相关的图像目标跟踪以及人体运动目标检测算法。第一,针对高斯混合模型学习系数的更新问题,引入了匹配失败率计数,通过计数值动态改变学习率,加快了模型学习速率;第二,针对Mean-Shift核函数带宽获取问题,研究了一种利用光流来估计核函数带宽的方法,改进的跟踪算法在人体目标跟踪试验中拥有较好的跟踪效果。
[1]Liu H,Mohammed I,Fan Y,et al.An HDM I cable equalizer w ith self-generated energy ratio adaptation scheme[J]. Circuitsand Systems,2009,56(7):595-599
[2]李武,侯志强,魏国剑,等.跟踪框自适应的尺度变化目标跟踪算法[J].山东大学学报:工学版,2014,44(2):28-34
[3]王建华,张方华,龚春英,等.电压控制型BuckDC/DC变换器输出阻抗优化设计[J].电工技术学报,2007,22(8):18-23
[4]张波,胡宗波,Author.同步整流器中MOSFET的双向导电特性和整流损耗研究[J].中国电机工程学报,2002(3):89-94
[5]Yang M,Lai C,Lin C.A robust EM clustering algorithm for Gaussian mixture models[J].Pattern Recognition,2012,45(11):3950-3961
[6]郭志波,董健,庞成.多技术融合的Mean-Shift目标跟踪算法[J].山东大学学报:工学版,2015,45(2):10-16
[7]田金文,王勇,谭毅华.基于Meanshift的核窗宽自适应目标跟踪新算法[J].数据采集与处理,2009(6):762-766
[8]李勇明,覃剑,曾孝平.基于边界力的Mean-Shift核窗宽自适应算法[J].软件学报,2009(7):1726-1734
Study on Object Tracking Technology of Human Motion Based on the Embedded Platform with High Performance
CUIJie,XU Cong-ti
DepartmentofSports and Arts/Bengbu MedicalCollege,Bengbu 233030,China
With the rapid developmentof computer technology and image processing algorithm,visualobject tracking system ismore w idely used in industrial,security,body object testing and others.This paper designed and implemented for the treatment to the embedded live images through collection,display and network transm ission based on TI's high performance DaVinci System on Chip(SoC)and put forward a kernel bandw idth estimated algorithm on Mean-Shift on a basis of improved the Gaussian backgroundmodeling algorithm to realize an exact tracking forhumanmotion.
Object tracking;humanmotion detection;embedded image treatment
TN957.52
A
1000-2324(2016)04-0611-05
2016-05-12
2016-06-06
崔杰(1980-),男,硕士,讲师,主要研究方向为运动医学、体育训练.E-mail:bbcjie1999@163.com
猜你喜欢
数学小灵通(1-2年级)(2024年4期)2024-05-14 09:30:52
小哥白尼(趣味科学)(2022年1期)2022-04-26 14:21:08
大科技·百科新说(2021年10期)2021-12-31 07:24:02
基层中医药(2021年5期)2021-07-31 07:58:34
小学生学习指导(低年级)(2019年6期)2019-07-22 03:33:10
特别健康(2018年3期)2018-07-04 00:40:10
铁道通信信号(2018年2期)2018-04-18 12:18:23
电镀与环保(2016年3期)2017-01-20 08:15:32
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:36
单片机与嵌入式系统应用(2014年9期)2014-03-11 15:35:13