弹载滚转稳定平台相对转角测量电路设计*
2016-09-16 09:10王丽平祝敬德邹珊蓉中北大学电子测试技术国防科技重点实验室太原03005中北大学仪器科学与动态测试教育部重点实验室太原03005
电子器件 2016年4期
王丽平,李 杰,2*,祝敬德,邹珊蓉(.中北大学电子测试技术国防科技重点实验室,太原03005;2.中北大学仪器科学与动态测试教育部重点实验室,太原03005)
弹载滚转稳定平台相对转角测量电路设计*
王丽平1,李杰1,2*,祝敬德1,邹珊蓉1
(1.中北大学电子测试技术国防科技重点实验室,太原030051;2.中北大学仪器科学与动态测试教育部重点实验室,太原030051)
针对MEMS捷联惯性测量系统在高旋弹药姿态测量过程中,无法克服高量程和高测量精度的矛盾,提出了采用半捷联惯性测量单元和增量式光电编码器测量旋转弹滚转角的方法,重点设计了相对转角测量电路,并对增量式光电编码器在实际应用过程中出现的问题进行了研究,最后通过三轴飞行仿真转台试验进行验证。试验证明,该相对转角测量电路具有一定的可行性和有效性,能够有效测量惯性测量组合与弹体之间的相对转角,具有一定的工程应用价值。
旋转弹;相对转角测量电路;增量式光电编码器;半捷联惯性测量单元
常规弹药制导化的前提是能够实时获得弹体的飞行姿态参数。基于MEMS惯性器件的惯性测量单元具有成本低、体积小、抗干扰能力强、短时间精度高、抗过载能力强的特点,在旋转弹药制导化方面得到广泛应用[1-2]。但是由于MEMS器件工艺的限制,传统的捷联惯性测量系统在测量高旋转弹药的姿态参数时,存在量程与精度互相矛盾的问题,从而导致姿态测量精度较低。
王晨[3]针对火箭弹滚转动态范围大的问题,提出通过伺服电机驱动惯性测量单元相对弹体等速反旋,隔离在滚转方向上高旋角速度对惯性测量单元的影响。吕清利[4]提出了一种图像制导的弹载滚转稳定平台,利用磁阻传感器和伺服控制系统实现滚转稳定。王晨、吕清利等人提出的方法虽然解决了常规弹药在滚转方向上的高旋问题,但此时惯性测量单元测得的滚转角不是弹体的滚转角。如果要想获得弹体的滚转角,需要在微惯性单元与弹体之间加上一个能够测量相对转角的装置,测量微惯性测量单元与弹体之间的相对转角。增量式光电编码器具有分辨率高、响应速度快、体积较小、质量较轻、功耗较低等特点,因此本文选用增量式光电编码器来测量相对转角。
1 弹载滚转稳定平台工作原理
弹载滚转稳定平台结构示意图如图1所示,光编和微惯性测量单元安装在内筒,内筒与伺服控制系统的电机轴通过联轴器捷联,光电编码器的轴通过机械加工固定在平台外壳[5]。在已知弹体转速和方向的前提下通过控制电路和伺服控制系统使得电机带动内筒实现等速反旋,光电编码器的定子和转子就会相互转动,输出脉冲数,换算成对应的角度,就是内筒与弹体的相对转角。在姿态解算时通过算法即可得到弹体的姿态参数。

图1 弹载滚转稳定平台结构示意图
2 相对转角电路设计
2.1光电编码器的工作原理
光电编码器是一个通过光电转换装置将输出轴上的几何位移量转换为脉冲数或者数字量的传感器,其原理图如图2所示。其核心部件为光栅盘和光电检测装置,光栅盘是把一定直径的圆盘等分地开通若干个长方形孔,光栅盘与光编的轴固联。当光编的轴转动时,光栅盘同速旋转,经过发光二极管等电子元件组成的检测装置会输出若干脉冲信号,通过对输出脉冲计数就能计算转速,在已知时间的前提下就能算出对应的角度。根据检测原理,光编可以分为光学式、磁式、感应式和电容式,按照信号输出形式,光编分为增量式、绝对式和混合式3种。
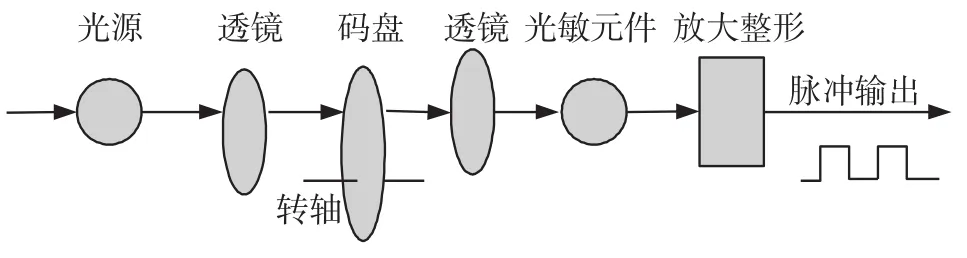
图2 光电编码器原理图
2.2光编信号方向判断
本文选用10位增量式光电编码器测量相对转角,其分辨率约为0.35°。该增量式光电编码器具有体积小、价格低、精度高、响应速度快、性能稳定,高分辨率的特点。增量式电编码器有A、B、Z 3路输出信号,当光电编码器定子和转子有相对转动时,光电编码器会输出A、B两路相互正交的数字脉冲信号。当光编旋转一圈时,输出一个Z脉冲信号。
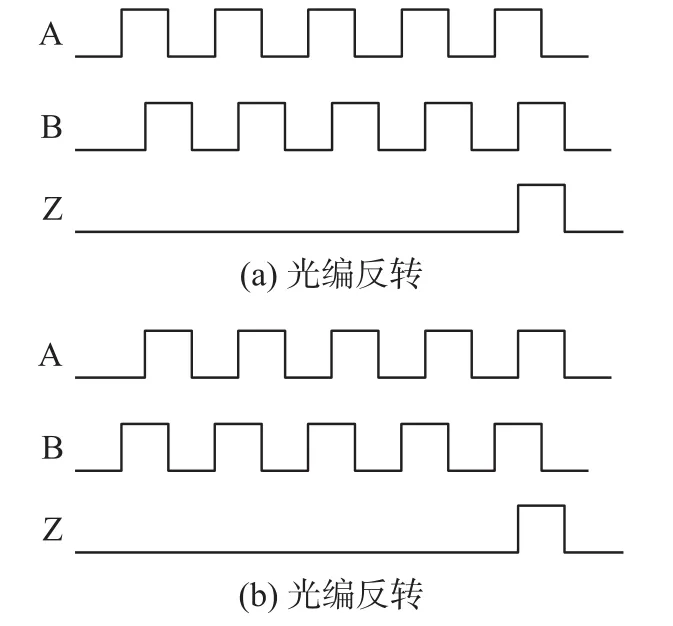
图3 光编方向判断示意图
如图3所示,当编码器正转时,A路信号的相位超前B路信号90°。编码器反转时,A路信号的相位落后B路信号90°。光电编码器每旋转一圈,Z路信号输出一个脉冲信号,用来表示编码器的零位,将脉冲误差控制在每转以内,能有效的避免误差累积。A、B两路信号用于判断被测物体的旋转方向和计算被测物体的转速。
2.3光编抖动产生机理
在实际运用过程中,炮弹在飞行过程中由于风等环境因素使得弹体出现抖动现象[6],从而引起光编的轴出现抖动,导致光编输出的脉冲不稳定,光编抖动信号如图4所示。如果在对光编输出的脉冲计数时,对干扰脉冲不进行判断会导致计数不准确,最终导致弹体的飞行姿态参数测量不准确。

图4 光编抖动干扰信号图
对图4光编输出的干扰信号分析可知,光电编码器有抖动干扰时,A、B两相脉冲输出信号不是一个完全正交的脉冲列,在脉冲的上升沿和下降沿都有可能出现抖动脉冲。原因是光电编码器的转子有机械抖动时,码盘在很小的范围内做高频率的正向运动和反向运动。如图5所示,码盘在位置Ⅰ和位置Ⅱ交替反复运动。

图5 码盘抖动运动示意图
2.4光电编码器抖动抑制方法
从增量式光电编码器A、B两相输出的脉冲信号可以看出,A相脉冲在上升沿和下降沿时对应的B相脉冲电平是不一致的。因此可以利用D触发器将相邻两跳变沿时刻所对应的另一相脉冲的逻辑电平寄存起来,然后进行比较。若一致,必为干扰信号,此时不应计数,若不一致,则为正常脉冲信号,在已知方向的前提下计数加1或减1[7,8]。
3 光电编码器接口电路设计
常规弹药的转速最高能达到20 rot/s,光编输出的A、B两相脉冲信号的最高频率能达到20 kHz。所以光编的A、B、Z三相输出的脉冲一般和FPGA的全局时钟管脚连接,GCLK为FPGA提供时钟信号,与FPGA的276管脚连接,A、B、Z三相与FPGA 的275、54和55管脚连接,如图6所示。

图6 光编接口电路图
在实际运用时,光编输入的信号首先需要接入到IBUFG的输入端,IBUFG作为时钟输入管脚相连接的首级全局缓冲,从全局时钟管脚输入的信号都必须经过IBUF元,否则在布局布线时会报错。IBUFG支持LVDS、TTL、LDT等多种格式的I/O标准。从IBUFG输出端输出的光编信号需要接入到BUFG的输入端,因为从BUFG的输出端的信号到达FPGA内部IOB、CLB的延迟和抖动最小。

图7 飞行仿真试验现场图
4 试验验证
为了验证相对转角电路设计的正确性和有效性,将弹载滚转稳定平台安装在飞行仿真转台上,安装示意图如图8所示。在试验过程中,飞行仿真转台在俯仰和偏航方向上保持不变,滚转方向上高速旋转模拟炮弹高速旋转,记录相关参量,对仿真试验数据进行分析。

图8 惯性测量单元滚转角
通过对数据的读取分析,得出惯性测量单元的滚转角和光编测量的相对转角如图9、图10所示。

图9 光电编码器测得的相对转角

图10 系统滚转角
对内筒的滚转角和光编测得的相对转角数据进行处理,得出系统的滚转角,如图10所示。与飞行仿真转台测得的滚转角进行对比,对比结果如图11所示。由于系统与转台存在轴向角度安装误差,所以在高速旋转过程中会出现峰峰值3°左右的角度误差,但稳定以后误差约为0.35°,满足光编测量的误差范围。
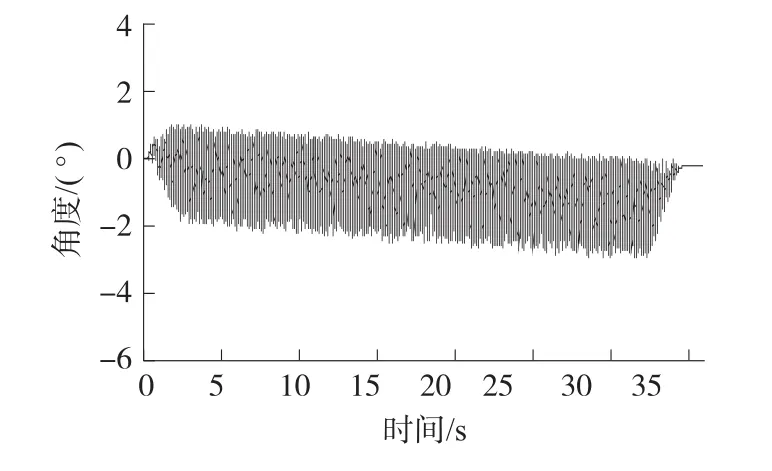
图11 滚转角误差
5 结论
本文利用增量式光电编码器来测量弹体与内筒的相对转角,并通过与内筒惯组测得的滚转角解算出弹体的滚转角,通过试验验证利用增量式光电编码器测量弹载滚转稳定平台的相对转角是可行的,并且具有较高的测量精度,具有一定的工程价值。
[1] 刘俊,石云波,李杰.微惯性技术[M].2005.
[2] 杜继永,黄国荣,张凤鸣,等.基于低成本MEMS器件的捷联航姿系统设计[J].传感技术学报,2010,23(11):1662-1666.
[3] 王晨,董景新,高宗耀,等.火箭弹大动态单轴平台惯导系统姿态解算[J].中国惯性技术学报,2012,20(3),257-261.
[4] 吕清利.图像制导弹药的弹载滚转稳定平台设计[D].南京:南京理工大学,2011.
[5] 李杰,刘俊,张文栋.微型惯性测量装置[J].仪器仪表学报,2006,27(6):1450-1451,1462.
[6] 李杰,刘俊.制导弹药用微惯性测量单元结构设计[J].兵工学报,2013,34(6):711-717.
[7] 赵诣,李杰,刘喆,等.旋转弹用MEMS惯性测量组合数据硬回收系统设计[J].传感技术学报,2012,25(9):1251-1256.
[8] 祝敬德,李杰,王丽平,等.基于光电编码器的相对转角测量系统[J].测试技术学报,2015,29(2):145-148.

王丽平(1989-),女,山西省交城县人,现为中北大学在读硕士研究生,主要从事微系统集成、惯性测量方向的研究,wlp624@126.com;

李杰(1976-),男,山西省岚县人,教授,硕士生导师,现在中北大学电子测试技术国防科技重点实验室工作,主要从事微系统集成理论与技术、惯性感知与控制技术、组合导航理论等,lijie@nuc.edu.cn。
The Relative Angle Measurement Circuit Design of Stable Roll Platform for Missile*
WANG Liping1,LI Jie1,2*,ZHU Jingde1,ZOU Shanrong1
(1.North Uniυersity of China Scienceand Technology on Electronic Test&Measurement Laboratory,Taiyuan 030051,China;2.Key Laboratory of Instrumentation Science&Dynamic Measuremen(tNorth Uniυersity of China),Ministry of Education,Taiyuan 030051,China)
Aiming at the problem that the conventional MEMS strap-down inertialmeasurement has difficulty in overcoming the contradiction between high range and high measurement accuracy,a new measurementmethod of roll anglewas proposed by using semi-inertialmeasurement unitand incremental optic-electrical encoder.The design of the rollanglemeasurement circuitwas introduced,some researches were made on the problems of incremental photoelectric encoder in the actualapplication process,and itwas finally verified by the three-axis flightsimulator tests.Tests show that the relative anglemeasurement circuit that is feasible and effective canmeasure effectively the relative angle between IMU and projectile and ithasa certain value in engineering.
rotary bomb;relative anglemeasurement;incrementalopticalencoder;semi-strapdowninertialmeasurementunit
V241
A
1005-9490(2016)04-0903-04
项目来源:武器装备探索研究项目(7131017)
2015-07-31修改日期:2015-08-30
EEACC:7320C;120010.3969/j.issn.1005-9490.2016.04.029
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10
新技术新工艺(2022年3期)2022-04-02
爆炸与冲击(2022年2期)2022-03-17
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
模具制造(2019年10期)2020-01-06
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
解放军健康(2017年5期)2017-08-01
探测与控制学报(2015年4期)2015-12-15
中学生数理化·八年级物理人教版(2014年1期)2015-01-09