基于单片机的微球腔温度控制系统的设计
2016-09-16 09:09侯进旺冯欣悦化雪荟佛山职业技术学院电子信息系广东佛山528000
电子器件 2016年4期
侯进旺,冯欣悦,化雪荟(佛山职业技术学院电子信息系,广东佛山528000)
基于单片机的微球腔温度控制系统的设计
侯进旺*,冯欣悦,化雪荟
(佛山职业技术学院电子信息系,广东佛山528000)
设计了基于ADS1247的铂电阻测温方案,将ADS1247输出的可编程恒定电流作为铂电阻激励源,并采用ADS1247集成的可编程放大器放大铂电阻的电压降,然后将放大器输出的信号进行24 bit模数转换。升降温通过BTS7960驱动芯片构成的半桥电路分别驱动加热片和制冷片。在控制策略上选用增量式数字PID算法,单片机ATmega128进行控制量计算,输出PWM信号控制驱动电路。电路结构简单,测量精度及稳定性好。软件上采用零点调准、查表和线性插值法进一步实现温度的精密测量。经长时间实验观测,测量误差在0.02℃内,系统温度控制精度优于0.1℃。
单片机;温度控制;精密测温;PID控制
光学微球腔是指半径从几微米到几百微米的球形光学谐振腔,通常使用的介电材料是二氧化硅等光学玻璃。近些年,光学微球腔由于具有极高的品质因数和较小的模式体积而受到日益广泛的关注[1]。微球腔的特性来源于其独特的回音壁模式WGM或WG(Whispering Gallery Mode):光波在微球内表面上不断进行全反射,从而被约束在球内并沿球的大圆绕行[2-3]。高Q特性使微球腔广泛应用在要求极细线宽、极高能量密度和亮度或极细微探测能力的领域中,例如非线性光学和腔量子电动力学,以及窄带光学滤波、高灵敏度运动传感器和极低阈值激光器等[4-5]。在文章[6]中论证了微球腔作为高灵敏度温度传感器的可行性,温度的分辨率可以达到0.1℃。
光学微球腔自身所具有的优点使其应用领域在不断扩大[7-8]。与此同时,各应用领域对微球腔的技术要求也在不断提高。因此研究如何降低微球腔测量误差,提高器件的测量精度具有十分重要的意义。
温度影响是光学微球腔在研究和工程化过程中需要解决的一个重要问题。微球腔的热膨胀系数和热光效应对外界温度敏感,这会导致谐振频率或波长的的漂移[9-10]。同时外界温度的不规则变化,会引起漂移会发生不规则的变化,不容易进行温度补偿。因此对微球腔的外界温度进行精确控制,来研究微球腔的温度特性,保持微球腔性能的稳定,对于后续提出新型补偿方法,构建高稳定性、高精确器件具有非常重要的意义。本文针对微球腔系统对温度的敏感性问题,以微球腔温度调谐系统为研究对象,通过对测温电路、温度处理算法、控制电路和控制算法等进行研究,实现测温精度高、超调量小、响应时间快、温度稳定性好、对外界环境干扰能够快速调整的精密温控系统,满足微球腔对温控系统的要求。
1 系统测温模块设计
采用恒流源法进行铂电阻温度控制,需要向铂电阻提供恒定的电流。本设计采用基于TI公司的ADS1247的铂电阻的测温方案,将ADS1247输出的可编程恒定电流作为铂电阻激励源。测量过程中,采用ADS1247集成的可编程放大器放大铂电阻的电压降,并将放大器输出信号进行24 bit的A/D转换。
1.1三线制铂电阻的测量方法设计
三线制热电阻采样时,首先需要对多路选择开关进行配置。MCU通过SPI口向ADS1247写入控制字,达到对多路选择开关MUX的配置目的。通过配置多路选择开关,使得2个电流源与三线制热电阻的连接关系如图1所示。连接关系配置结束后,配置PGA参数,然后配置电流源并启动电流源。

图1 三线制热电阻测量示意图
当电流流过铂电阻时,会产生电压降;同样电流流过热电阻的连线电阻时,也会产生压降。所以加在PGA上的差分电压如式(1)所示:

其中,U为加在PGA上的差分电压;RPT为实际热电阻值;RW1为热电阻a端一根导线的电阻;RW2为热电阻b端一根导线的电阻;I为恒流源输出电流值。
两路恒流源电流汇聚后,流经参考源采样电阻Rref产生电压降,该电压作为ADS1247内部模数转换器参考源,参考源电压如式(2)所示:

其中,Uref为模数转换器参考电压值;Rref为实际参考电阻值;I为恒流源输出的电流值。
通过公式推导,三线制热电阻采样值与实际值的关系如式(3)所示:

其中,Rpt为实测热电阻值;RPT为实际热电阻值;RREF为理论参考电阻值。由式(3)可知,三线制热电阻测量精度与热电阻线电阻差值(RW1-RW2)及参考源采样电阻的精度有关。
1.2提高测量精度方法的设计
由式(3)可知,三线制电阻测量精度与参考电压取样电阻及热电阻线电阻差(RW1-RW2)有关。因此,要想实现高精度测量,必须选择高精度和高稳定性的电阻作为参考电阻采用RX70精密绕线电阻,精度为万分之一。绕线电阻具有精度极高,工作时噪声小,稳定可靠,温度系数小,耐高温等优点。为减小线电阻差的影响,实际应用中保持铂电阻导线等长。为减小电路板上导线电阻引起的误差,铂电阻接线端与参考电阻要尽可能靠近ADC芯片引脚,并尽量确保电路板上的导线等长。
在上式推导中,均假设PGA和ADC均不会引入误差。但实际情况并非如此。在实际应用中,当输入为零时,模数转换器的输出并不为零,存在误差。使得测量不能达到预期精度。因此在启动ADC进行数据转换之前,要对ADS1247进行系统偏置校准和增益校准。
本设计采用ADS1247的数字滤波器减小工频干扰,数字滤波器放置于模数转换之后,其作用是对采样值进行数字滤波处理,从而达到滤除干扰噪声的目的。数字滤波器的滤波特性与采样速率有关,实际中ADC的数据速率为5 sampling/s。数字滤波特性如图2所示,50 Hz及60 Hz工频干扰噪声均被衰减70 dB以上。

图2 数字滤波特性(5 sam p ling/s)
在电路设计上,ADS1247单独供电,通过0Ω将模拟地与数字地隔离。在电路板上采用大面积铺地,进一步降低电磁干扰。实际应用中发现,在差分输入端与参考电压端接滤波电容,可进一步提高有效转换位数。
1.3温度测量电路设计
ADS1247中集成了可编程放大器、24 bit精密ADC芯片和数字滤波器,很大程度上简化了电路设计。测量电路如图3所示。其中1、2、3端分别接铂电阻的3根引出线。ADS1247的AIN0、AIN1引脚既作为恒流源输出引脚,也作为PGA的差分输入引脚。差分输入端与参考电压端所接滤波电容均选取2.2。

图3 三线制铂电阻测温电路图
在测温电路设计中,采用以ADS1247模数转换器为基础,使用三线制铂电阻和恒流源法的测温方案,硬件上采用先进芯片和非常简洁的外围电路,提高了抗干扰能力,大大减小了引线电阻等误差因素对测量精度的影响;软件上采用零点调整、查表法和线性插值法,减小了系统中误差电阻等影响,并且解决了铂电阻的非线性问题,对于提高测量的准确度具有非常大的帮助。测试结果显示,电路的测量精度误差在0.02℃以内,分辨率为0.006 7℃,满足设计要求。
2 温度控制模块的设计
2.1温控元件的选择
采用没有机械振动的半导体制冷片作为制冷元件,这样不仅能减少温度的控制误差也可以消除振动的干扰,同时可以降低高精度温度控制系统的成本。
金属陶瓷发热片是高温共烧多层的金属-陶瓷复合材料,发热的金属浆料层被印刷在作为绝缘介质的氧化铝陶瓷生坯上,再通过上面叠合另外一层氧化铝陶瓷生坯,通过高温共烧成为一体,其中的金属钨导电发热,具有耐腐蚀、耐高温、寿命长、高效节能、温度均匀、导热良好、热补偿快等优点。
2.2驱动电路设计
实际驱动电路设计如图4所示,其中COLD和HEAT是电压输出端,分别驱动制冷片和加热片。
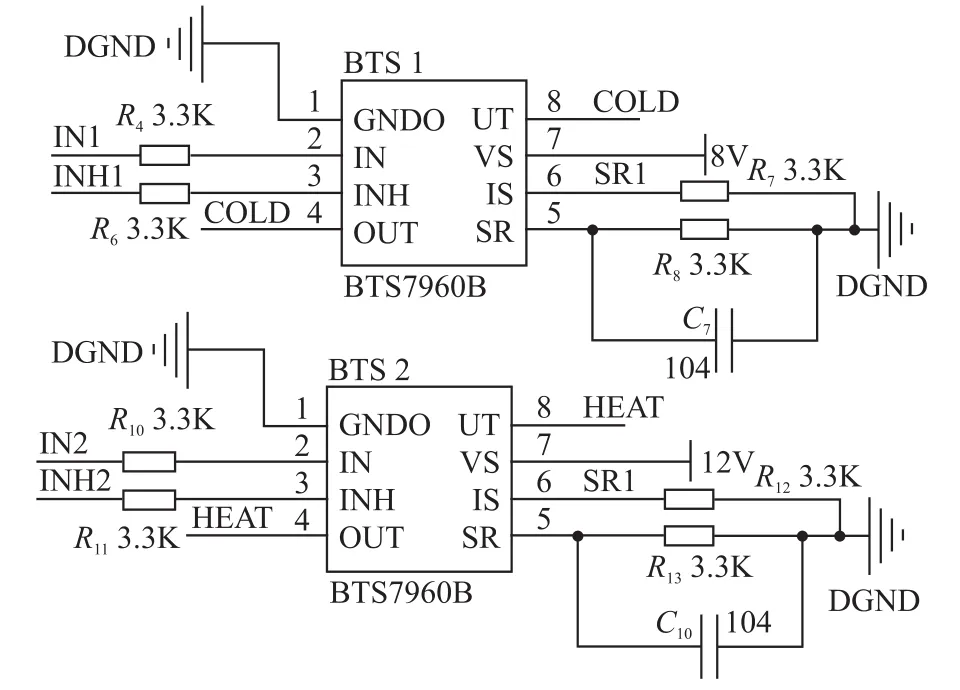
图4 驱动电路原理图
2.3温度平台机械设计
恒温平台是精密温度控制系统的一个重要组成部分,为满足系统的精度设计要求,该平台对环境温度变化干扰必须具有良好的抑制效果。
恒温平台由上下两个箱体组成,在平台的顶面放置制冷片和加热片,同时安装有齿式散热片,平台内部放置微球腔及其平台,在非常靠近微球腔的地方固定铂电阻Pt100,以便获取最准确的微球腔所处范围的温度。平台的内外壳体为全铝壳体,采用螺栓固定,中间填充硬质聚氨酯泡沫塑料,作为保温夹层,以防止环境温度的干扰以及制冷片在制冷时热端的热量回流。平台的结构示意图如图5所示。

图5 温度调谐平台结构示意图
2.4PID控制算法
本设计采用增量式PID进行控制。在单片机中,增量式PID控制算法流程如图6所示。
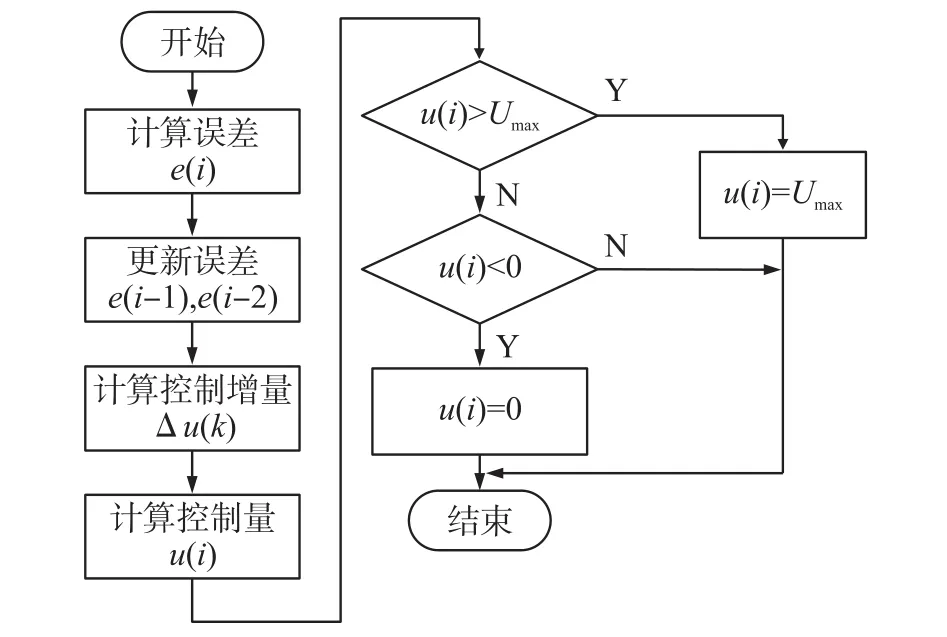
图6 PID控制算法流程图
3 系统电路及软件设计
3.1系统电路设计
本设计的系统电路结构如图7所示。

图7 系统电路结构图
3.2系统软件设计
温度控制系统的软件开发采用模块化设计方式,程序模块主要有初始化模块、温度采集转换模块、PID控制计算模块、控制信号输出模块和数据发送模块。程序流程图如图8所示,系统上电后,单片机复位,程序运行到主函数开始处进行单片机初始化,LCD初始化,ADC初始化,然后程序是在一个while语句的死循环中一直运行。
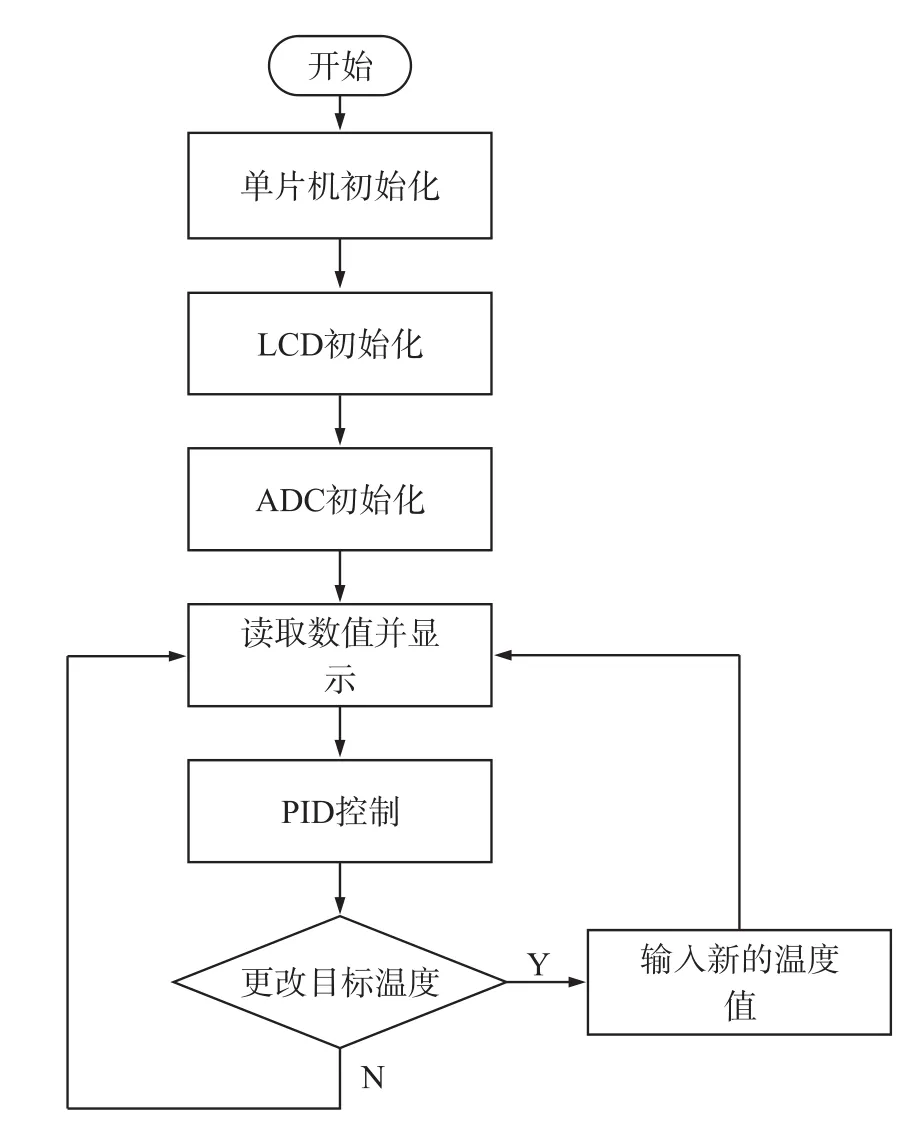
图8 系统软件流程图
4 温控系统性能测试及应用
4.1PID控制测试
首先测试温度控制系统的制冷效果,平台内的温度由26.5℃制冷至24.0℃。PID参数Kp=1,Ki= 0.000 3,Kd=0。效果图如图9(a)所示。
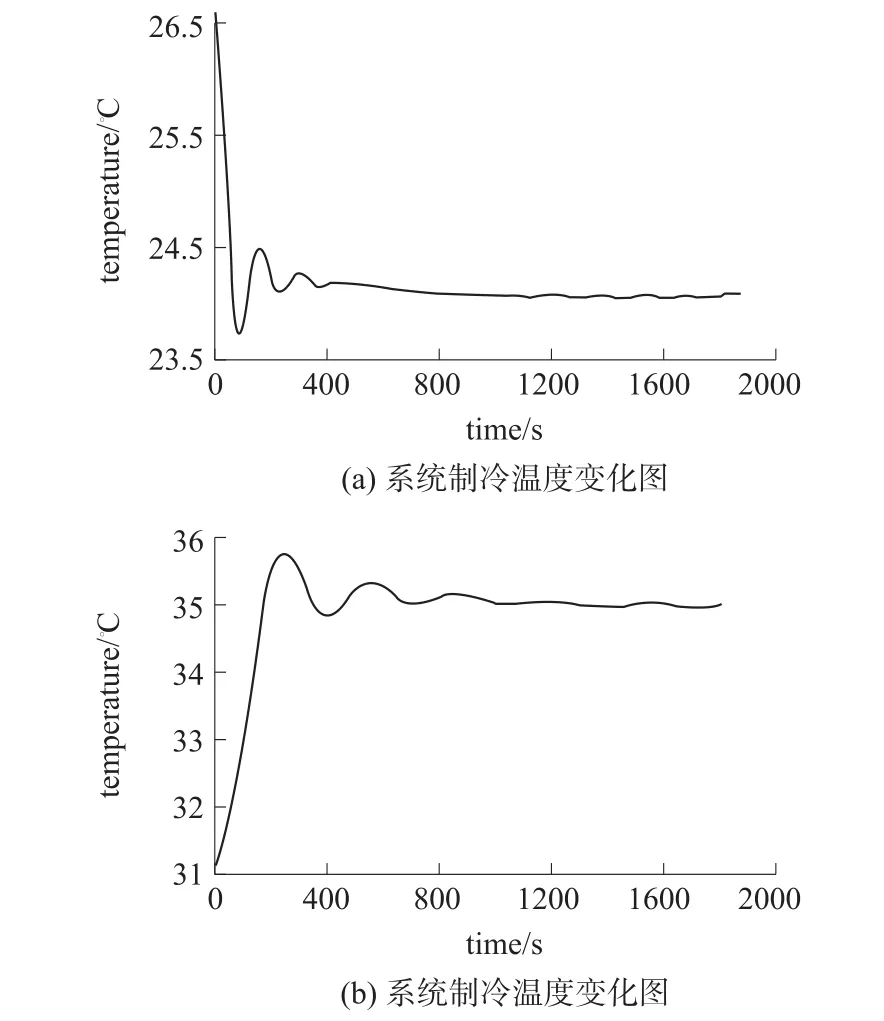
图9 系统制冷和加热温度变化图
从图9可以看出,制冷达到稳定所需要的时间约为800 s。制冷达到稳定后,温度在目标温度24.0℃左右波动,波动范围最大是0.02℃。测试温控平台的加热效果,从31.1℃加热至35.0℃。PID参数Kp=1,Ki=0.000 25,Kd=0。效果如图9(b)所示。
从图中可以看出,制热达到稳定所需要的时间约为1 000 s。比制冷时间略长,这是由于加热片的功率小于制冷片的功率。达到稳定后,温度在目标温度35.0℃左右波动,温度波动范围为0.04℃,满足设计控制精度优于0.1℃的要求。
4.2温控系统的应用
在实际中,应用该温控平台对微球腔的外界温度进行了精确控制,分别进行了变温和恒温实验,取得了良好的实验效果。实验测试装置如图10所示。

图10 实验测试装置图
其中信号发生器发出三角波,对激光器进行调制。调制后的激光通过单模光纤传递,并在微球腔内发生谐振。谐振波形通过探测器感知,并与信号发生器的三角波在示波器上进行比对。对比示波器上的波形变化可观测温度改变及温度恒定时对微球腔的性能的影响。

图11 未控制微球腔外界温度时波形图
图11表示当微球腔未放置于温控平台内时,微球腔外界温度未被控制,在10min内,谐振波形对比图。从图11可以看出,波形发生了很大的漂移,外界环境中的温度对微球腔的性能产生很大的影响。
图12表示将温度稳定在14.0℃时,微球腔内谐振的波形图,每隔5min记录一次数据,记录25min。
通过图12可以看出,当微球腔外界温度保持恒定时,微球腔的谐振波形几乎不发生漂移。对比图11与图12可知,温控平台很好的抑制了外界温度的干扰,保证了微球腔性能的稳定。
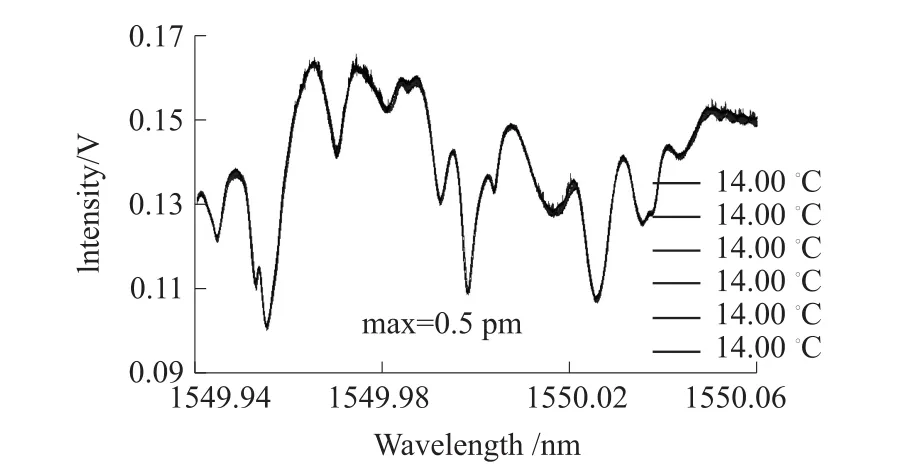
图12 温度恒定时微球腔谱线图
利用该实验,我们可通过保持微球腔外界温度的恒定来解决漂移的不规则变化,漂移不容易补偿等问题,保持微球腔性能的稳定,进一步提高测量的准确性。
图13表示当温控平台改变微球腔外界温度时,谐振波形发生的变化。
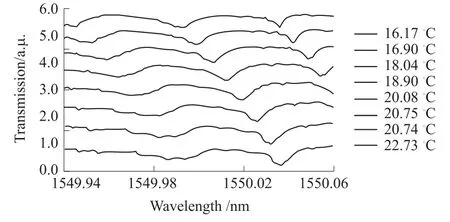
图13 温度改变时微球腔谱线漂移图
通过对比不同温度下的微球腔的谐振波形,可以发现,在温度改变的情况下,波形发生了明显的漂移,在实验中可观测出相应的漂移值。
4.3实验结论
通过温控平台的性能测试实验,及其应用实验,可得出如下结论:
(1)该温控平台制冷大约需要13min达到稳定,温度波动范围为0.02℃;加热大约需要16min达到稳定,温度波动范围为0.04℃;精度均符合设计要求。温度通过键盘设定,液晶显示当前温度与设定温度,达到设计要求,可以在实际中进行应用。
(2)在实际应用中温控系统可以很好地抑制外界环境温度不规则变化产生的干扰,保证微球腔性能的稳定。恒温控制可以很好的解决漂移的不规则变化,漂移不容易补偿等问题;温控平台的变温控制可用于观测微球腔谱线漂移与温度变化的关系;这对于后续提出新型补偿方法,提高测量精度,构建高稳定性、高精确器件具有很大的帮助。
5 结论
本文通过测温模块和控制模块在硬件电路、算法等方面进行了对比设计,对温控系统进行了长期的测温和控温测试。实验结果表明,该系统的测温精度、控制精度和稳定性等都能够满足预期的指标要求,可以应用于实际,为分析外界温度如何影响微球腔的性能,及后续提出补偿方法,构建高稳定性、高精确器件提供帮助。
[1] 张宇光,李鹏,王丽,等.外界环境对微球腔品质因数的影响[J].光子学报,2011,40(5):803-806.
[2] Dong C H,He L,Xiao Y F,et al.Fabrication of High-Q Polydimethylsiloxane Optical Microspheres for Thermal Sensing [J].Applied Physics Letters,2009,94(23):231119.
[3] Ma Q,Rossmann T,Guo Z.Whispering-Gallery Mode Silica Microsensors for Cryogenic to Room Temperature Measurement[J]. Measurement Science and Technology,2010,21(2):025310.
[4] 宋丹,任勇峰,姚宗.一种低功耗水下多通道实时采集存储装置的设计[J].电子器件,2013,36(4):502-505.
[5] 邬琦,杨江涛.一种恒温箱温度控制系统的设计与实现[J].计算机测量与控制,2014,22(8):2455-2458.
[6] 任春华,马宝春,张敬栋,等.基于模糊神经网络的石英加速度计的温度控制[J].压电与声光,2011,33(6):890-897.
[7] 陶佰睿,顾丁,苗凤娟,等.一种基于单片机的温度传感器校准实验平台设计与实现[J].传感技术学报,2013,26(3):435-438.
[8] 邬琦,杨江涛,马喜宏.基于FPGA的高速信号采集电路的设计与实现[J].实验室研究与探索,2015,34(4):124-128.
[9] 李艳.基于AT89C51的多点温度巡测及控制系统[J].仪表技术与传感器,2009(4):44-45.
[10]董钊,高伟,甘玉泉.基于DSP的高精度恒温控制系统设计[J].电子器件,2009,32(4):855-858.

侯进旺(1959-),男,河南洛阳人,硕士,副教授,主要从事工业控制电子方向的研究,houjinwang_vip@163.com;

冯欣悦(1990-),女,山西运城人,硕士,助教,主要从事图像处理,电子信息方向的研究;

化雪荟(1976-),女,甘肃景泰人,硕士,高级实验师,主要从事应用电子设计、移动通信技术、传感器应用方向的研究。
Designed of Temperature Control System for Microsphere Cavity Based on SCM
HOU Jinwang*,FENG Xinyue,HUA Xuehui
(Department of Electronic Information,Foshan Polytechnic Institute,Foshan Guangdong 528000,China)
The platinum resistance temperature program is designed based on the ADS1247.The constant current in the ADS1247 which is programmable drives the RTD(Real Time Differential).Then,the PGA(Programmable Gain Amplifier)in the ADS1247 amplifies the voltage on the RTD.At last,the 24-Bit analog-to-digital converter converts the PGA's output.Heating and cooling through BTS7960 half bridge circuit control the temperature.The microcontroller ATmega128 calculates the controlling amountby using incremental digital PID(Proportion Integration Differentiation)algorithm,outputs the PWM signal to control the drive circuit.The circuit structure is simple with preciousmeasurementand good stability.Software adopts zero alignment,table lookup and linear interpolation method to further realize the precision of temperaturemeasurement.By the experimentalobservation for a long time,measurementerror iswithin 0.02℃and the system temperature controlprecision isbetter than 0.1℃.
SCM;high-precision temperaturemeasurement;temperature control;PID control
TN791
A
1005-9490(2016)04-0768-06
2015-08-02修改日期:2015-10-27
EEACC:7320R10.3969/j.issn.1005-9490.2016.04.004
猜你喜欢
潍坊学院学报(2020年6期)2020-11-22
原子与分子物理学报(2020年5期)2020-03-17
中成药(2017年6期)2017-06-13
化工设计通讯(2017年5期)2017-06-05
现代电子技术(2016年15期)2016-12-01
现代工业经济和信息化(2016年2期)2016-05-17
工业设计(2016年6期)2016-04-17
通信电源技术(2016年4期)2016-04-04
中国当代医药(2015年29期)2015-03-01
自动化与仪表(2014年10期)2014-02-26