
基于支撑向量机的地杂波虚警抑制技术
2016-09-13 01:48邢远见李国刚
现代雷达 2016年8期
邢远见,陈 翼,祝 欢,李国刚
(1. 中国电子科技集团公司 智能感知技术重点实验室, 南京 210039;)(2. 南京电子技术研究所, 南京 210039)
·信号处理·
基于支撑向量机的地杂波虚警抑制技术
邢远见1,2,陈翼1,2,祝欢1,2,李国刚2
(1. 中国电子科技集团公司 智能感知技术重点实验室,南京 210039;)(2. 南京电子技术研究所,南京 210039)
由于杂波的非均匀特性,传统杂波抑制技术的杂波滤除能力有限。在强杂波环境下,处理后回波仍残留大量虚警。文中提出了新的点迹滤波技术,用于抑制杂波虚警。针对地面动目标检测体制雷达,通过提取目标和杂波的五种分类特征和五种先验特征,使用主成分分析和支撑向量机方法过滤虚假点迹。试验结果表明:文中提取的特征和设计的分类器,可在较少目标损失下,有效地抑制地杂波虚警。
点迹滤波;支撑向量机;地杂波
0 引 言
雷达通过发射电磁波照射目标并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。但是,复杂地理环境所产生的杂波信号严重地影响了雷达目标探测性能。恒虚警检测(CFAR)[1]、杂波图检测技术[2]和点迹凝聚技术[3]是地面雷达中常用的检测手段,用来提高目标的检测概率,并减少杂波虚警。然而,由于电磁环境复杂多变,杂波表现出非平稳和非均匀的特性,使仍有许多杂波虚警被检出报送,造成虚假航迹产生和影响目标航迹关联。
另一类杂波抑制方法被称为点迹滤波,它从被检出的目标和杂波点迹着手,挖掘二者的回波内在差异,从而剔除杂波虚警。其实现过程可归结为两步:首先,提取可区分目标点和杂波点的特征;然后,设计分类器区分判别。本文提出的点迹滤波方法区别于传统方法[4-11]在于:第一,针对地面动目标检测(MTD)体制雷达,提取更本质、更精细特征,包括五种分类特征和五种先验特征;第二,引入机器学习中的支撑向量机方法,对多维特征联合分类。实测数据显示,本文方法在目标损失5%情况下,可有效剔除45%的杂波虚警。
1 点迹滤波框架
点迹滤波框架为有监督的机器学习过程,如图1所示。训练集为点迹数据及其所属类别标签,用来训练分类器。测试集为待测数据,经训练好的分类器,报送分类结果。分类器输入通常是能够区分不同类别数据的特征,而非原始数据本身。因此,特征提取过程非常关键,直接影响分类器效果。此外,特征提取后对特征的去噪、规范、约简等操作,同样重要。

图1 点迹滤波流程框架
2 特征提取
该阶段目标是提取尽量多的,可体现杂波和目标差异的“好”特征。“好”的特征应具备稳健和物理可解释两种特性。通过对杂波点迹和目标点迹形成机理的研究,发现杂波和目标在以下两大类属性存在本质不同:
1)目标运动,地杂波静止。基于此,我们提取两种特征反映该属性。
(1)中心频率:定义为输出最大信噪比的多普勒通道,它反映了点迹的径向运动特性。地物杂波的中心频率多出现在零多普勒通道,而目标的中心频率在各通道均可能出现。该特征局限是对切向目标失效。
(2)最近邻点:定义为最近若干圈中其他点与该点的最近距离,它反映某位置回波是否重复被检测到。地物杂波位置固定,最近邻点较近;目标由于运动,最近邻点较远。该特征局限是对目标飞入杂波区域时失效。
2)目标点状,地杂波面状(点杂波除外)。点状和面状差异,造成目标和地杂波在回波扩展方面存在不同,我们提取三种特征表现该属性。
(1)距离展宽:定义为凝聚成该点的所有回波点的最大距离差。
(2)方位展宽:定义为凝聚成该点的所有回波点的最大方位差。
(3)回波数:定义为凝聚成该点的所有回波点数量。
以距离展宽为例,图2示意了造成点目标与面杂波在该特征下差异的产生原因。回波距离向展宽大小与目标、杂波尺寸相关。在相同回波幅度条件下,点目标尺寸小、扩展少,面杂波尺寸大、扩展多。方位扩展和回波数差异的产生原因与距离扩展类似。

图2 目标和杂波的回波距离展宽原理示例
以上五种特征,即中心频率、最近邻点、距离展宽、方位展宽、回波数,其数值大小与目标或杂波的回波幅度,所处位置、周围环境等均有关系。我们称前者为分类特征,称后者为先验特征。比如:回波幅度提高,则目标或杂波的距离展宽、方位展宽、回波数均会相应增大,但增加的程度可能不同。因此,利用上述五种特征进行点迹分类时,应综合考虑其先验信息,从而实现精细化点迹分类。我们提取五种先验特征:信噪比表征其幅度信息,距离和方位表征其位置信息,距离向上点迹周围的回波强度和该点迹所属杂噪区域类型表征其周围环境信息。
综上,共十种特征被用于对目标和杂波判别。
3 数据规约
3.1异常值剔除
异常值剔除是根据人工经验,剔除明显异常的数据,避免其对分类器产生扰乱。考虑雷达探测的实际场景中,目标的方位扩展受天线波束宽度限制,不会过宽;目标的距离扩展受自身尺寸限制,不会过长;目标的回波数受天线波束宽度和自身尺寸双重限制,不会过多。根据对某车载雷达实录回波数据统计,真实飞机目标的方位扩展不超过5°,距离扩展不超过150 m,回波数不超过12个。
3.2维度约简
维度约简的目的是去除冗余特征,降低问题复杂度和观测噪声,实现等效甚至更高的分类效果。主成分分析(PCA)是常用的特征约简手段。它通过正交变换将一组可能存在相关性的变量转换为一组线性不相关的变量,转换后的这组变量叫主成分。然后,使用若干最大主成分作为综合指标,尽可能多地保留原始信息。
3.3特征白化
白化的目的是去除特征间相关联度,并归一化至同一尺度。白化需满足两个条件:1)不同特征之间的相关性接近零;2)所有特征的方差相近。将数据通过PCA降维后,每一维是独立的,满足了白化的第一个条件。然后,对每一维都除以其标准差,方差相同,即满足了白化第二个条件。
显然,我们提取的十种特征之间存在信息冗余。比如:回波数与方位扩展、距离扩展相关,点迹周围回波功率与该点迹所属杂噪区标志相关。本文采用主成分分析法,将原十种特征转换为不相关变量,选择最重要的若干主成分,输入分类器判别。
4 支撑向量机分类器
支撑向量机(SVM)思想是在高维空间中寻找一个分类超平面,将不同类别的数据样本点分开,使不同类别的点之间的间隔最大,该分类超平面即为最大间隔超平面,对应的分类器称为最大间隔分类器。
两个分类超平面之间具有最大间隔,需要知道训练样本中的支撑向量,距离支撑向量最近的平行超平面。设w是分类超平面的法向量;b为位移量。求解SVM可以变成解决如下凸优化问题。
(1)
需要注意的是:1)当数据是线性可分的时候,才可以找到一个分类超平面将数据完全分开。为处理非线性数据,可使用核函数方法对线性SVM进行推广。2)虽然通过核函数映射将原始数据映射到高位空间后,能够线性分类的概率增大,但并非一定,比如:噪声数据。对于这种偏离正常位置很远的数据,称之为野值。为解决该问题,可对原约束条件引入松弛变量ζi解决,即
(2)
5 实验结果
5.1实验数据
我们使用某窄带车载雷达,在西安架设,探测空中目标。对雷达回波进行脉冲压缩和MTD处理,然后,经CFAR检测,杂波图检测和回波点凝聚处理,形成初始点迹。结合民航广播式自动相关检测(ADS-B)信息和人工逐圈比对,将点迹标注为杂波点和目标点两类,形成试验用的训练集和测试集,详细信息见表1。
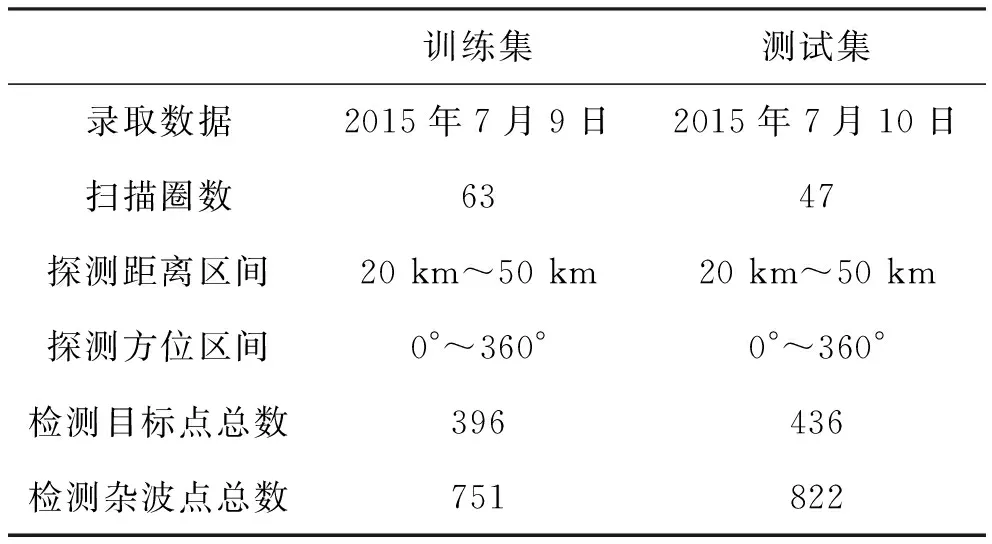
表1 点迹数据集描述
5.2特征提取
去除扩展异常点后,提取了训练集中的目标/杂波点的五种运动特征和扩展特征。
1)中心频率
目标和杂波的中心频率分布如图3所示,共16个频率通道。由于地杂波主要分布在低频区域,因此,大多数杂波点的中心频率分布在零和近零频率通道,而目标则分布在各通道。图中所示零通道杂波点数量少是因为该通道杂波幅度强,采用了更高的检测门限以抑制虚警,同时零通道的目标数量也相应较少。

图3 目标和杂波在各频率通道的数量分布
2)最近邻点
目标和杂波的最近邻分布如图4所示。在过去三圈雷达扫描中,仅1.6%的目标点的最近邻点在300 m以内,而杂波则多达19%。这说明目标由于运动,很少会在多圈的相同位置重复出现,而固定的地物杂波则可能在多圈的相同位置被重复检测到。
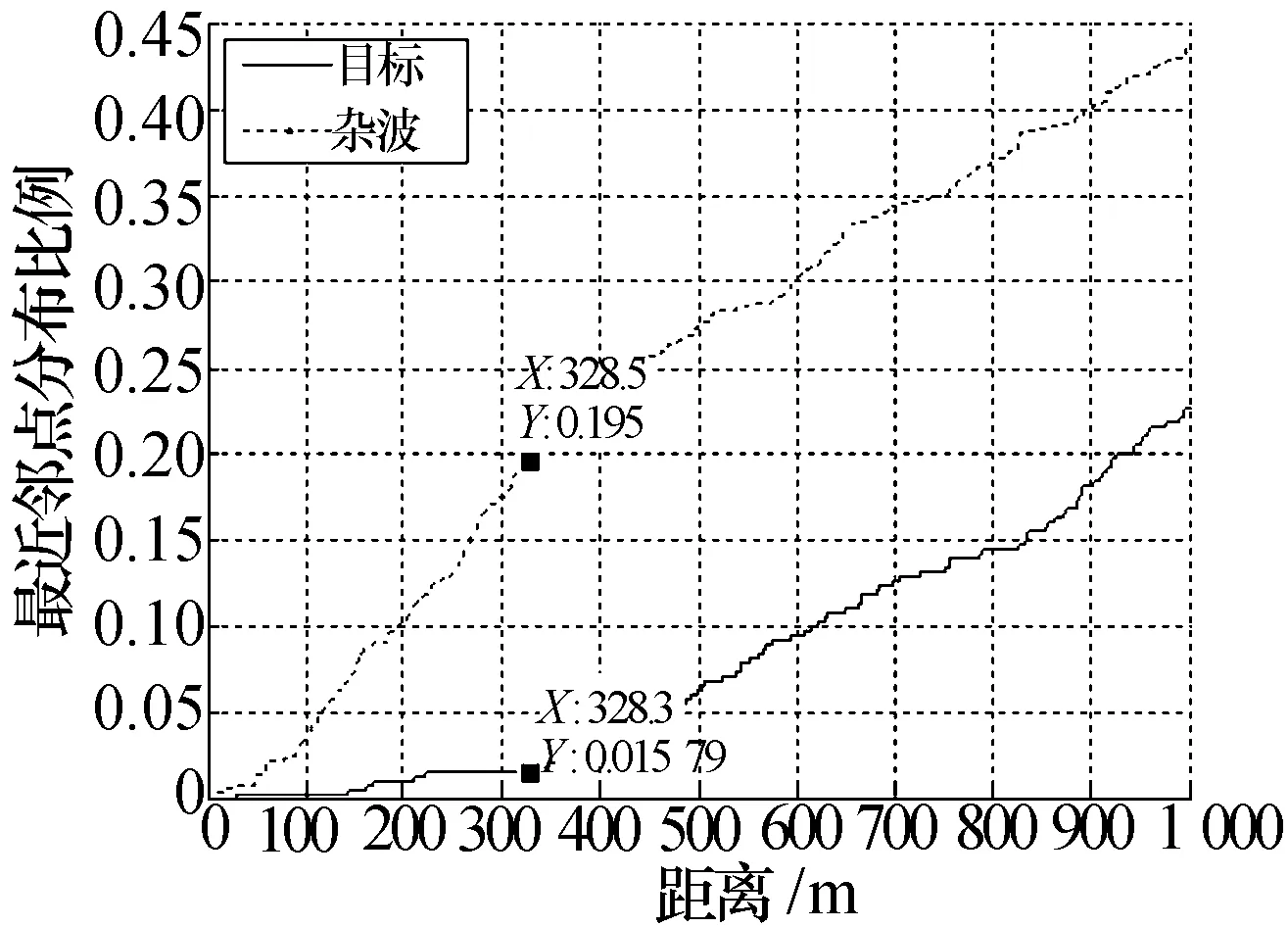
图4 目标和杂波的最近邻点分布
3)方位扩展
目标和杂波的方位扩展分布如图5所示,可见,目标方位扩展较杂波方位扩展大。按检测信噪比,对目标点和杂波点进一步细分为四类:20 dB以下、20 dB~25 dB、25 dB~30 dB和30 dB以上。这四类中,目标方位扩展仍大于杂波,但差异程度不同。中等信噪比下的目标和杂波方位扩展差异较大。

图5 目标和杂波的方位扩展随信噪比的分布
4)距离扩展
目标和杂波的距离扩展分布如图6所示,可见,目标距离扩展较杂波距离扩展大。与方位扩展分析相同,按检测信噪比对目标点和杂波点进一步细分为四类。这四类中,目标扩展均仍大于杂波扩展,但扩展的差异程度不同,低信噪比和高信噪比下的目标和杂波距离扩展差异较大。
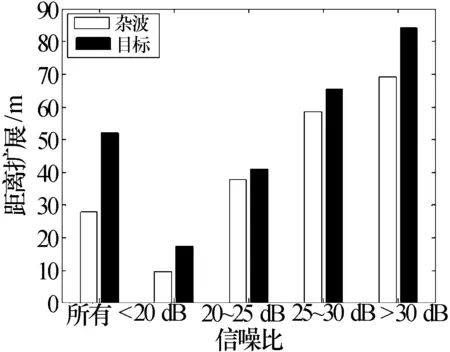
图6 目标和杂波的距离扩展随信噪比的分布
5)回波数
目标和杂波的回波数扩展分布如图7所示。目标扩展较杂波回波数多。与方位扩展分析相同,按检测信噪比对目标点和杂波点进一步细分为四类。这四类中,目标回波数均仍大于杂波回波数,但回波数的差异程度不同,高信噪比下的目标和杂波的回波数差异较大。
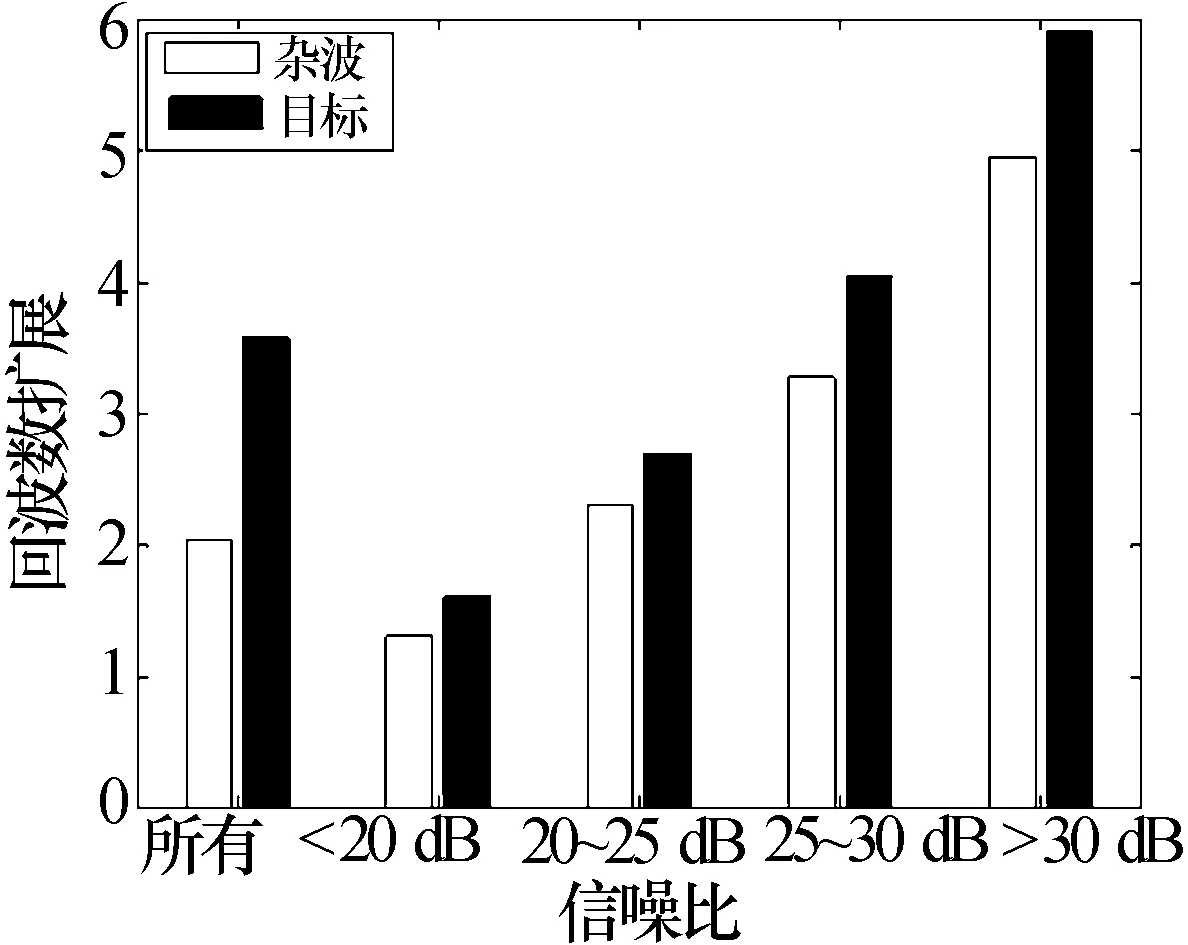
图7 目标和杂波的回波数扩展随信噪比的分布
5.3点迹过滤
首先检验维度约简处理对分类效果的改善。
对数据特征进行PCA处理后,各不相关维所含信息量由其特征值表征。图8显示了对训练集数据特征PCA处理后各维度的特征值大小。可见数据的80%的信息可由前三维特征表示,96%的信息可由前七维特征表示。
图8 训练集点迹特征经PCA处理后的比重分布
图9显示了使用PCA处理后的前三维、前七维和全部十维特征训练和测试SVM分类器的效果,通过调整分类门限,实现不同的目标识别精度和杂波识别率。可见,使用了全部特征的分类效果反而并不如前两种。造成这种结果的原因可能是数据本身存在噪声,PCA处理后舍弃了包含噪声的信息,从而提升了分类准确性。允许目标损失6%~10%的情况下,使用三维PCA不相关特征的分类器可以剔除更多杂波虚警;在仅允许5%以内目标损失的情况下,使用七维PCA不相关特征的分类器可以剔除更多杂波虚警。
图9 不同PCA降维数后的分类性能
图10对比了使用七维特征对测试集分类前后的雷达P显点迹分布。图9a)为点迹过滤前分布,‘.’表示飞机目标,‘+’表示虚警;图9b)为点迹过滤后分布。P显画面杂波剔除比例明显(45%),目标损失较少(5%),验证了算法有效性。
图10 点迹滤波前后的点迹P显分布
6 结束语
针对地面MTD体制雷达,提取五种分类特征和五种先验特征。对数据进行异常点剔除,并基于PCA方法对特征约简、白化,然后,选择若干最重要的不相干特征,使用支撑向量机点迹分类,实现了在较小目标损失下,剔除大量杂波虚警的目的。在雷达中利用此项技术可获得较大得益。
[1]NITZBERG R. Constant-false-alarm-rate signal processors for several types of interferences[J]. IEEE Transactions on Aerospace & Electronic Systems, 1972, 8(1): 27-34.
[2]陶海红,李明,廖桂生. 雷达杂波图的形成算法及实现[J]. 现代雷达, 2002, 24(3): 13-15.
TAO Haihong, LI Ming, LIAO Guisheng. Forming algorithm and realization of radar clutter map[J]. Modern Radar, 2002, 24(3): 13-15.
[3]刘树锋. 雷达目标点迹分裂与改进的点迹提取器设计[J]. 电子科技, 2010, 23(1): 45-47.
LIU Shufeng. The design of radar target plot extractor based on target split and plot agglomeration[J]. Electronic Science and Technology, 2010, 23(1):45-47.
[4]HAYKIN S, DENG C. Classification of radar clutter using neural networks[J]. IEEE Transactions on Neural Network, 1991, 2(6): 589-600.
[5]HAYKIN S, STEHWEN W, DENG C, et al. Classification of radar clutter in an air traffic control environment[J]. Procedings of the IEEE, 1991, 79(6): 742-772.
[6]陈志坚. 雷达数据处理中非真实目标点迹的处理[J]. 现代雷达, 1995, 17(3): 43-48.
CHEN Zhijian. The processing of false target plots in radar data processing[J]. Modern Radar, 1995, 17(3): 43-48.
[7]徐晓群,吕江涛. 舰载雷达数据处理的杂波抑制方法[J]. 现代雷达, 2004, 26(8): 36-38.
XU Xiaoqun, LÜ Jiangtao. Method of clutter suppression in data processing for shipborne radars[J]. Modern Radar, 2004, 26(8): 36-38.
[8]李为民, 朱永锋, 付强. 基于自适应模糊聚类分析的目标冗余信息处理[J]. 计算机应用, 2005, 25(4): 949-951.
LI Weimin, ZHU Yongfeng, FU Qiang. Information processing of target redundancy based on adaptive fuzzy C-Means clustering analysis[J]. Computer Applications, 2005, 25(4): 949-951.
[9]窦泽华,张仕元,李明. 基于雷达回波识别的杂波抑制[J]. 信号处理, 2009, 25(8): 1193-1197.
DOU Zehua, ZHANG Shiyuan, LI Ming. Clutter suppression based on radar return classification[J]. Signal Processing, 2009, 25(8): 1193-1197.
[10]张飚, 张仕元, 窦泽华. 警戒雷达仙波特性分析[J]. 现代雷达, 2008, 30(6): 65-72.
ZHANG Biao, ZHANG Shiyuan, DOU Zehua. Angels character analysis based on surveillance radar[J]. Modern Radar, 2008, 30(6): 65-72.
[11]於建生,马红星,朱征宇. 基于雷达回波相关特征的海杂波抑制方法[J]. 舰船电子工程, 2009, 29(6): 121-124.
YU Jiansheng, MA Hongxing, ZHU Zhengyu. Correlation character of radar echo based sea clutter suppression algorithm[J]. Ship Electronic Engineering, 2009,29(6):121-124.
邢远见男,1987年生,博士,工程师。研究方向为雷达杂波抑制和目标识别。
陈翼男,1985年生,硕士,工程师。研究方向为雷达阵列信号处理和反干扰。
祝欢男,1985年生,博士,高级工程师。研究方向为雷达阵列信号处理和杂波抑制。
李国刚男,1983年生,硕士,工程师。研究方向为机载雷达系统。
Filtering Ground-clutter-false-alarms Using Supported Vector Machine
XING Yuanjian1,2,CHEN Yi1,2,ZHU Huan1,2,LI Guogang2
(1. Key Laboratory of Intellisense Technology, CETC,Nanjing 210039, China)(2. Nanjing Research Institute of Electronics Technology,Nanjing 210039, China)
For the heterogeneity of clutter, traditional methods are limited in clutter suppression. In strong clutter environment, a large number of false alarms still exist in the processed radar echo. With respect to ground-based moving-target-detection radar, five classification-features and five prior-features of target/clutter plots are extracted in this paper. Then, techniques of principal component analysis and supported vector machine are adopted for plot classifying. Experimental results show that the extracted features and designed classifier can effectively filter ground-clutter-false-alarms while few target plots are lost.
plot filtering; supported vector machine; ground-clutter
10.16592/ j.cnki.1004-7859.2016.08.008
邢远见Email:yuanjiangx@qq.com
2016-04-30
2016-07-01
TN957
A
1004-7859(2016)08-0034-05
猜你喜欢
兵工学报(2022年11期)2022-12-01
科学与信息化(2021年30期)2021-12-24
幼儿园(2021年12期)2021-11-06
物联网技术(2019年9期)2019-11-06
科学与财富(2017年24期)2017-09-06
设备管理与维修(2017年1期)2017-04-11
中国修辞(2016年0期)2016-03-20
幼儿100(2016年28期)2016-02-28
火控雷达技术(2016年2期)2016-02-06
西北工业大学学报(2015年3期)2015-12-14
