
基于非接触测量获取点云数据的预处理
2016-09-13 02:54:18吴冠雄孙健鹏
天津职业院校联合学报 2016年8期
吴冠雄,孙健鹏
(天津渤海职业技术学院,天津 300402)
基于非接触测量获取点云数据的预处理
吴冠雄,孙健鹏
(天津渤海职业技术学院,天津300402)
非接触式点云数据获取在逆向工程、工业测量等领域应用广泛,通过投影光栅法获取产品点云数据也成为研究热点。通过坐标旋转法对多次扫描数据的拼接,实现数据拼合,保证产品信息完整。结合均匀网格法和非均匀网格法对获取点云数据进行精简和局部再精简。提出将曲线检测法和弦高差法配合使用实现了对数据的去噪。通过叶轮实例验证理论,提高了产品数据的完整性和精准度,为产品数据获取提供借鉴。
逆向工程;非接触测量;点云数据;预处理
0 引言
在产品的开发、设计和制造工程中,工程技术人员所获得的技术资料并不完全,很多是从上游厂家直接得到产品的实物模型,因此,设计人员需要通过一定的途径,将这些实物信息转化为CAD模型,这就应用到了逆向工程技术。逆向工程(Reverse Engineering)又称反求工程,其本质就是从产品中提取产品本身信息的过程,是常见的竞争力的基准或者是对受欢迎产品的良性剖析。在产品的逆向设计中,工件表面数据测量获取过程是逆向工程与CAD/CAE/CAM/CNC/RP之间重要的桥梁。工件表面数据测量是实现产品表面曲面信息数字化的过程即产品数字化,工件表面数据测量获取过程是逆向工程的关键环节之一,是进行工件逆向重建的基础,处理结果直接影响到后期建模质量。工件表面数据测量技术是指通过特定的测量方法和测量设备,将产品的形状信息映射成离散点的几何坐标。在实际获取过程中,经常会出现由于工件表面数据测量效果不好直接导致重建模型精度差甚至建模失败的情况。如何高效、高精度的完成工件表面点云数据的获取,成为了逆向工程的重要研究课题之一。
本文是应用投影光栅法获取工件(叶轮)的点云数据,然后对获取点云数据进行一系列预处理,最终获得比较理想数据的过程。本文的研究成果可运用于实际,能够取得很好的经济和社会效益,并为其他类似情况提供借鉴作用。
1 基于投影光栅法的数据获取
1.1扫描仪工作原理
非接触测量设备种类繁多,本实验室配备了北京天远三维科技有限公司与清华大学联合开发具有国际先进水平的天远三维扫描仪OKIO-B-400,是一款以三角架为支撑的,可任意移动的,比较便携的三维扫描仪,如图1所示。该设备不但功能十分强大,而且易于操作使用。在扫描过程中可以获得高密度点云数据,扫描速度快,精度高,单面的扫描时间不超过5s。扫描图像信息通过数据传输线可以在电脑上同步显示,通过人机交互调整实现数据的完整获取。
三维扫描仪主体是由三角支架、两台CCD相机、光栅发射器和标定板组成的。通过光栅发射器投射光栅,相机从两个方向进行照相采集,由于物体高度不同和两相机角度不同,则可通过对变形的光栅影线进调解获得位置点坐标。通过数据传输线与计算机相连,构成了整个测量系统,简图如下2所示。

图1 天远三维扫描仪
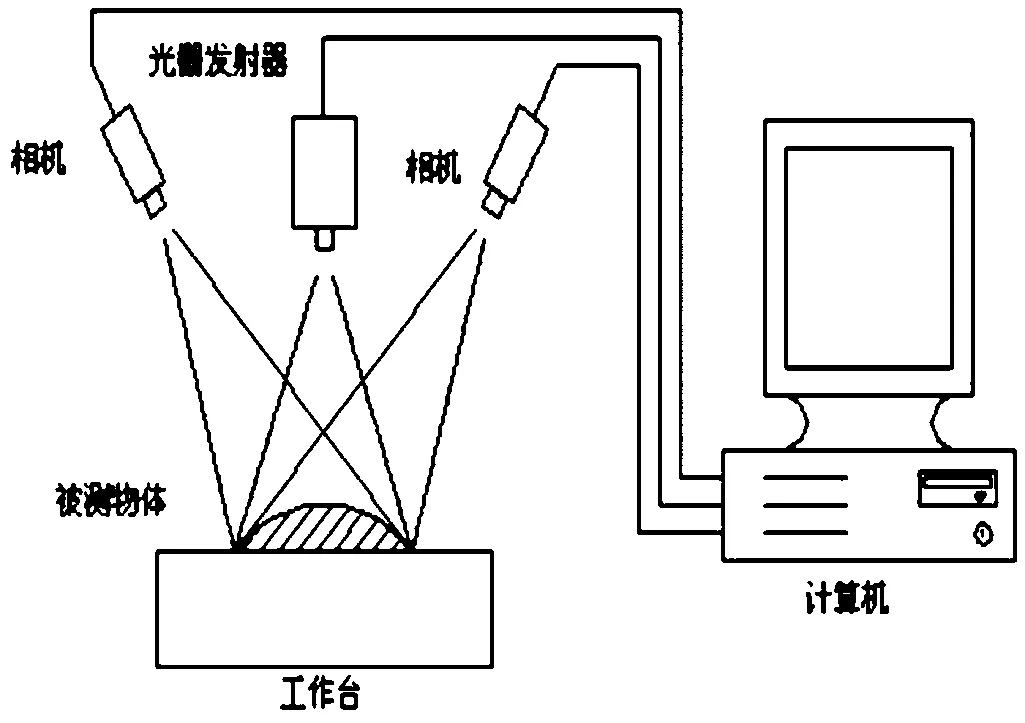
图2 测量系统简图
1.2投影光栅法
投影光栅法作为主动式视觉测量的一种,以其精度高、一次成像点多、扫描速度快得到了广泛的应用[4]。这种方法是基于辅助光源的主动式测量原理的,投影装置将辅助光源(如干涉光、激光等)投射在工件表面,通过相机获取条纹图像,图像中包含有工件的高度对光源的调制信息,对这些条纹图像进行相关视觉算法的处理,就可以获取工件表面的数字化信息。这种方法是通过在被测工件表面投射一组用周期函数调制过的光栅条纹场,由于工件表面的高低起伏变化,就造成了各点的投影光栅条纹产生了相位移动,利用测量系统的发射光线产生的相位偏差量与工件高度位置的关系,可以求解出测量点的三维坐标。
系统原理图如下图3所示。OP为投影设备镜头光心,即投影中心。OP在参考平面上的投影为O;ΩW为参考坐标系;ΩC照相机坐标系;ΩP为光栅发射器坐标系;
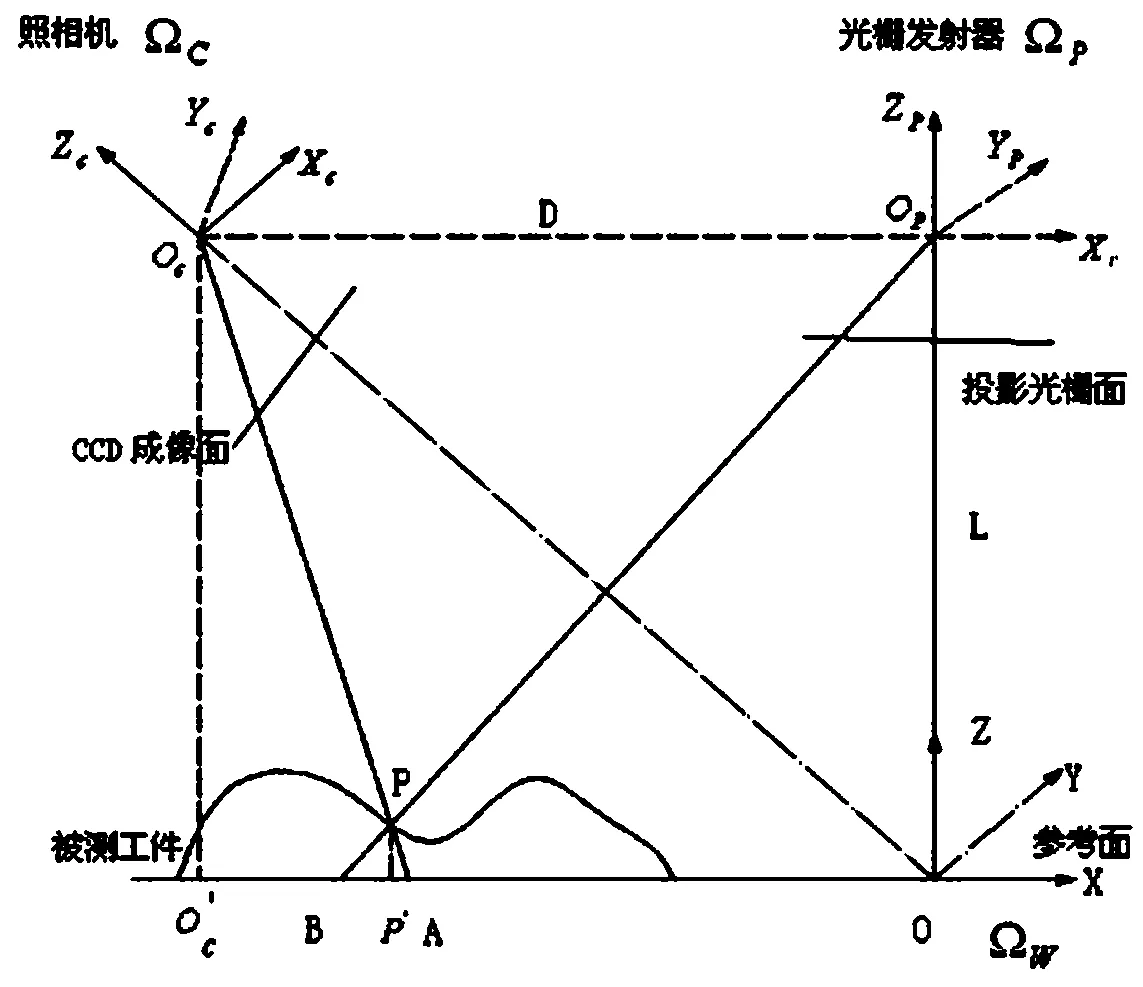
图3 投影光栅法系统原理图
投影光栅法是利用相移法从照相机投射的条纹光栅图像信息中提取相位场的分布信息。其中,四步相位法是主要原理之一,通过对投影光栅进行精确地移动,从而使条纹光栅图像的相位场发生移相,在同一图像坐标(m,n)处获得四幅条纹图像,其表示形式为:
(1)
(2)
通过求解出的相位值,利用其与三维坐标的关系和相似三角形法,来获取图像点的坐标信息。投影光栅面与参考平面OXY平行,光栅方向平行于参考面的Y轴,在OXY平面上沿着X轴方向的任意一点(X,Y),设其相位θ,则有:
(3)
其中,θ0是原点O的相位,λ0是光栅节距(在X轴方向上,一个周期相位变化对应的长度)。λ0可通过标定进行获取。
利用投影装置和照相机与参考平面组成的相似三角形关系,联立方程组可以算出:
(4)
其中,θA、θB为A、B对应的相位值。
综合上式,可以得到:
(5)
式(5)中,λ0、L、D为系统参数,都是通过标定获得。在得到θB时,需要将标定工作面调节到参考面的位置,计算机通过照相机获得的照片,解析出相位θB值。测量时,因为物体高度调制,投影光栅图像产生畸变现象,通过图像的畸变解出此时的θA,这样就可求解出PP',进而得到图像点的三维坐标。
2 获取数据预处理
随着设备的迅速发展,三维扫描过程中投影光栅的条纹逐步细化和测量精度的显著提高,通过这种方法可以获取非常庞大的点云数据,数量级可以达到几十万,甚至上百万。但是受扫描范围限制,很难通过一次扫描就获得工件表面的完整信息,需要从不同的角度和方位对工件进行多次扫描,因为每一次扫描都会获取有独立坐标的点云数据,所以要统一到同一坐标系下,即点云数据拼接;在测量过程中,由于受到工件表面特性、扫描环境和扫描设备等因素的影响,会不可避免的产生一些误差点,也就是噪声点;庞大的点云数据肯定会造成运算量增大,重建效率下降等,所以应该在满足一定条件的情况下,对数据进行精简处理等。因此,通过扫描设备获取点云数据后,必须进行相应的数据预处理。数据预处理的内容主要包括点云数据拼合、噪声点去除、点云数据精简和平滑等[5]。
2.1点云数据拼合
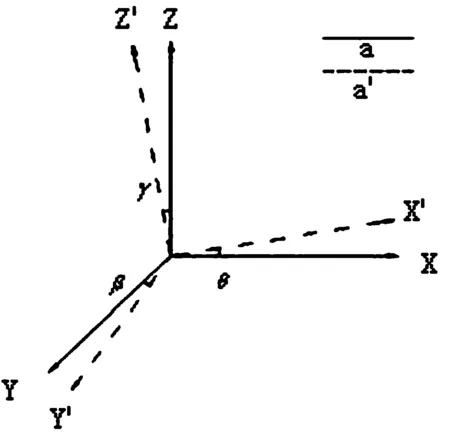
图4 坐标旋转示意图
在扫描过程中,需要将多次扫描数据统一到同一坐标系下,这样才能获得完整的数学模型。点云数据拼接的核心内容就是将求解目标点云转化为基准点云,求解出平移向量和旋转矩阵来实现坐标变换。
在欧式空间中存在一点a,a在三维空间的坐标可以进行相互交换的旋转和平移,设T为a的平移变换,R为a的旋转变换。点云的旋转变换可以由a代表,即a围绕原点在X、Y、Z三个坐标轴上旋转变换,在这三次旋转过程中旋转的角度即为欧拉角,分别为:θ、β、γ。图4为坐标旋转示意图。
旋转前后坐标如图所示,矩阵Rθ是a绕X轴旋转θ所得;矩阵Rβ是a绕Y轴旋转β所得;矩阵Rγ是a绕Z轴旋转γ所得,进行变换时公式为:
(6)


(7)
(8)
在坐标变换过程中,目的是为将目标点云和基准点云数据同一,可以建立以基准点云和最近目标点云的目的函数。
(9)
旋转参数θ、β、γ的取值范围为[-π,π],在目标点向最优基准点转换过程中,须对目标函数进行一定的约束:

(10)
综合上式,可将这些约束条件与目标函数结合构成无约束目标函数,结果如下式:
(11)
rk+1=crk
(12)

图5 二次不同扫描的叶轮点云数据
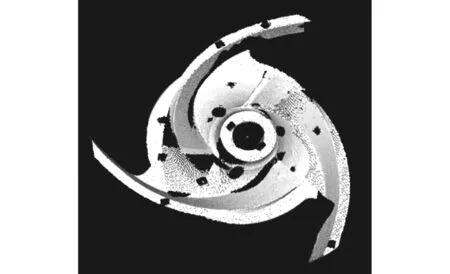
图6 实现数据拼接后的效果
2.2数据精简
为提高CAD模型质量,往往需要非常高的分辨率来满足细节需求,使得点云数目非常庞大,这就增加了模型的复杂性。然而模型的复杂性使得他们的存储、传输、处理和渲染十分困难,必须对数据进行简化,尤其是曲面曲率变化比较小时,不需要大量稠密的点云数据,数量太大会使曲面重建过程变得非常缓慢,甚至无法实现。而且在与其他软件进行数据传输时,也可能因为数据量太大导致数据丢失,最终影响重建模型的精度和质量,所以必须对获取数据进行简化处理,这也是逆向工程的主要研究内容之一。其主要采用均匀网格法和非均匀网格法。
均匀网格法:将全部数据点按照均匀网格进行划分,在分别从各个网格中选取符合条件的点,最后将网格中其余的点删除。网格构建方向通常垂直于Z轴,这主要是根据激光扫描的特点,在Z轴方向上误差表现更加明显。在均匀网格中使用中值滤波的方法进行数据点筛选。网格大小由用户根据需要指定,网格尺寸越大,采集到的数据点越少。在垂直于扫描方向上,构造一系列尺寸相同的网格,把全部数据点都投影到网格上,各个网格与数据点相互匹配,然后用中值滤波方法将符合条件的数据点提取出来,实现数据精化。这种方法比较适合处理扫描面曲率变化不大的区域,对于工件边缘或曲率变化较大的地方应该采用非均匀网格法进行精简。
非均匀网格法:为了弥补均匀网格在重建精度较差的不足,提出了一种能根据工件曲面变化进行数据简化的方法,即非均匀网格法。利用投影光栅法扫描工件时,用户可以根据需求设定网格尺寸、扫描路径和条纹间隔,网格尺寸决定了对工件数据点的计划减少率,扫描路径决定了测量头的移动规律,条纹间隔决定了数据点的密度。在进行简单曲面扫描时,各个方向不需要都进行高密度扫描。曲率变化较大处,说明此处形状复杂或者可能靠近边缘,通过角偏差法或者四叉树法对这部分点云数据进行处理,保留更多的数据点,使工件形状细节描述的更加精确。
本文灵活运用上述两种方法对上文拼合的叶轮点云数据进行精简处理,未经任何处理的原始点云数据量为982405,如图7所示。点云数据量均匀精简后为103265,由于叶轮轮毂部分是由回转体组成形状相对简单,可以对此处再进行局部精简,进行局部再精简后的数据量为61093。在保证叶轮轮廓的基础上,数据量大大减少,既保证了轮廓的完整性,又减小了计算量,进行精简效果如图8所示。
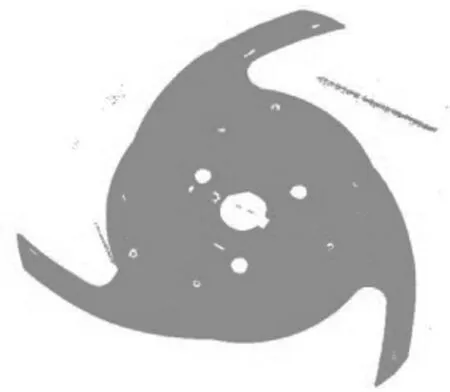
图7 原始叶轮点云数据

图8 精简后数据和局部再精简数据
2.3噪声点的去除
通过投影光栅法在获取工件表面数据过程中,可能会受外界光线、工作环境或机械抖动等各种人为因素和随机因素都可能产生噪声点,为了保证后续建模质量,需要对噪声点进行去除[6]。噪声点去除的主要方法有直接观察法、曲线检测法、弦高差法等。
直接观察法:是通过肉眼观察图形直接找出与实际工件偏离较大的点或孤立的点给予剔除。此法主要用于数据处理的初步检查,剔除这些比较明显的噪声点,且最好在对点云数据进行多边形网格化后处理起来更为便捷。

本文先用直接观察法将上文叶轮点云数据中明显的偏差数据去除后,巧妙地将曲线检查法和弦高差法结合,即用最小二乘法将首末点拟合成曲线,再选取检查点,通过前后两点连线,与拟合曲线和允差同时比较,将噪声点去除,能够获得比较理想的叶轮点云数据,如图9所示。
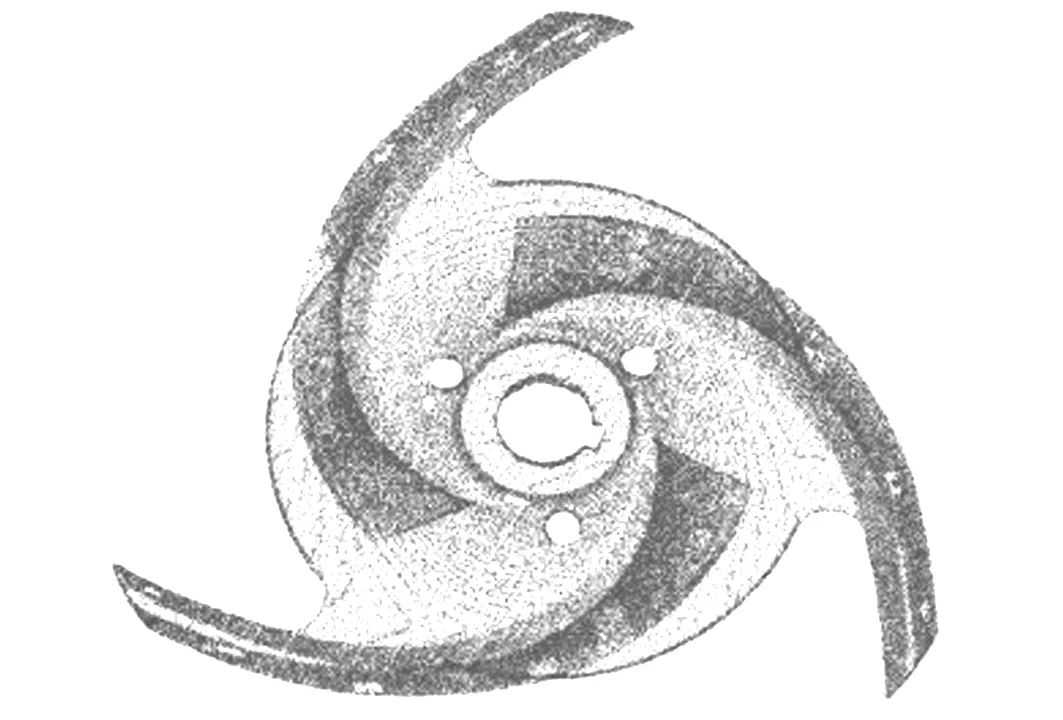
图9 最终的叶轮点云数据
3 小结
逆向工程技术不仅可以有效缩短产品研发周期,还可以大幅增加产品创新设计的成功率,因此成为研究热点。而非接触式点云数据获取正逐步成为逆向数据获取的主要形式,其研究自然也是重中之重。本文以投影光栅法获取数据的原理为基础,对点云数据进行预处理。重点研究了点云数据拼合,通过坐标转换理论实现多次扫描数据拼合;灵活运用均匀网格法和非均匀网格法对数据平滑精简;提出将曲线检查法和弦高差法相结合的方法对噪声点进行去除。增强了数据合理性,获得了比较理想的点云数据。将理论与实际结合,获取叶轮的精确点云数据,达到了预期效果,为类似产品点云数据的精准获取提供借鉴。
[1]Shane K.Curtis,Stephen P.Harston,Christopher A.Mattson.The fundamentals of barriers to reverse engineering and their implementation into mechanical components [J]. Res Eng Design, 2011,(22).
[2]邓佳文,张政,厉丹彤,万晓峰,黄明宇.基于逆向工程与快速原型的三维模型重构[J].塑料工业,2015, (05).
[3]李东锋,黄曦,彭浩舸,张利君.基于逆向工程技术的电风扇外壳模具设计与研究[J].湖南工程学院学报(自然科学版),2015,(04).
Pretreatment for Point Cloud Data Acquisition based on Non-contact Measurement
WU Guan-xiong, SUN Jian-peng
(TianjinBohaiVocationalTechnicalCollege,Tianjin,300221)
Non-contact point cloud data acquisition are widely used in the field of reverse engineering, industrial measurement, and acquisition of product point cloud data by grating projection method has become a research hotspot. The data merging is realized by merging the multiple scan data with method of coordinate rotation to ensure completeness of product information. It combines with uniform grid method and non-uniform grid method for streamlining and partial re-streamlining of the acquisition of the point cloud data. It is proposed to combine the curve examination method and difference of chord heights method to realize data de-noising. The theory is verified through the example of the impeller, which improves the integrity and accuracy of product data and provides reference for product data acquisition.
reverse engineering; non-contact measurement; point cloud data; pretreatment
2016-03-08
吴冠雄(1986-),男,汉族,天津渤海职业技术学院,初级,机械设计、逆向工程、3D打印、有限元分析等;孙健鹏(1984-),男,汉族,天津渤海职业技术学院,初级,控制工程、PLC编程等。
TP391
A
1673-582X(2016)08-0075-06
猜你喜欢
科学与财富(2019年3期)2019-02-28 07:33:42
科技创新导报(2019年24期)2019-01-14 02:41:55
特别健康(2018年2期)2018-06-29 06:14:00
电子制作(2017年17期)2017-12-18 06:40:47
湖北农业科学(2017年11期)2017-07-13 00:56:41
高师理科学刊(2016年8期)2016-06-15 20:27:46
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:41
科技创新与应用(2014年27期)2014-08-30 22:56:56
计算机工程(2014年6期)2014-02-28 01:25:08
物理与工程(2014年4期)2014-02-27 11:23:08
