深水钻井船锚泊定位分析方法研究
2016-09-09 01:31:43魏跃峰潘方豪中国船舶及海洋工程设计研究院上海200011
船舶 2016年4期
魏跃峰 潘方豪(中国船舶及海洋工程设计研究院 上海200011)
特邀专栏
深水钻井船锚泊定位分析方法研究
魏跃峰 潘方豪
(中国船舶及海洋工程设计研究院 上海200011)
采用准动态方法和动态耦合方法对作业于1 500 m水深的钻井船开展锚泊定位分析,比较两种方法的结果,并研究两种锚泊定位分析方法的特点。研究表明:不同设计阶段采用不同的锚泊定位分析方法能够提高设计的效率和精度。
深水钻井船;锚泊定位;准动态;动态耦合

引 言
深水钻井船的主要功能是进行海上油气勘探、钻井作业。为保护钻井隔水管及下部的球形接头不受损坏,钻井船的船体运动应限制在一定的范围内,这对深水钻井船的定位性能提出了很高的要求[1]。钻井船的定位方式有动力定位[2]和锚泊定位[3-4]两种。动力定位钻井船具有快速作业、快速撤离的优势,但运营成本较高。作业于相对温和海域的钻井船,可以采用锚泊定位方式。
锚泊定位分析方法是深水钻井船锚泊定位系统设计的关键。本文分别采用准动态方法和动态耦合分析方法对深水钻井船开展锚泊定位分析,计算完整系泊和单根锚索破断时钻井船锚泊系统的定位能力,研究两种不同方法的特点及在锚泊定位系统设计不同阶段的作用。
1 理论方法
1.1 准动态法
准动态方法首先根据三维频域势流理论计算船体水动力系数、一阶波浪力、二阶波浪力和运动幅值响应传递函数(RAOs),然后求解船体时域运动。在求解船体时域运动时,每一个时间步内的低频运动(纵荡、横荡和首摇)和波频运动(垂荡、横摇和纵摇)均需分别计算。低频运动响应通过求解时域运动方程得到,船体低频运动求解方程见式(1)[5]:式中:M为船体水平运动方向的质量矩阵;Fwave(2)为船体所受到的二阶波浪漂移力;Fcurrent为海流力;Fwind为风力;Fmoor为锚泊力。准动态方法中假定锚索处于静止状态,锚泊力通过求解静力学方程得到[6]。

在低频运动位置和船体首摇角的基础上,根据频域计算得到运动幅值响应结果,结合波浪时历获得波频运动响应时历。
准动态方法虽考虑到船体附加质量和二阶波浪漂移力,但忽略了船体阻尼、一阶波浪力以及锚索自身拖曳力和惯性力等诸多影响。
1.2 动态耦合
动态耦合分析方法首先通过三维频域势流理论计算船体水动力系数、一阶波浪力和二阶波浪力;然后通过快速Fourier变换(FFT)将频域分析得到的结果转换为相应的时间序列;最后结合每一个时间步内算得的锚泊力,求解船体时域运动方程。时域耦合运动方程为[7]:
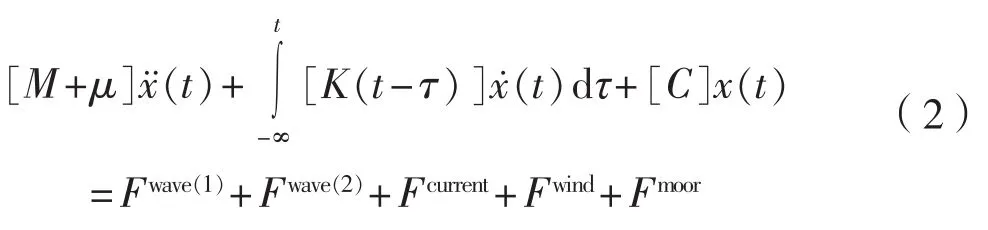
式中:M为船体六自由度运动方向的质量矩阵;μ为附加质量;K()为延迟函数;Fwave(1)为船体所受到的一阶波浪力;Fwave(2)为船体所受到的二阶波浪漂移力;Fcurrent为海流力;Fwind为风力;Fmoor为系泊力。动态耦合方法中,锚泊力通过求解动力学方程得到[7]。
动态耦合分析不仅考虑船体水动力系数、一阶波浪力、二阶波浪漂移力以及锚索自身拖曳力和惯性力的影响,而且还考虑每一个时间步船体运动对锚索张力的影响。
2 深水钻井船及锚泊定位系统
本文研究的深水钻井船船体主尺度参数见表1。
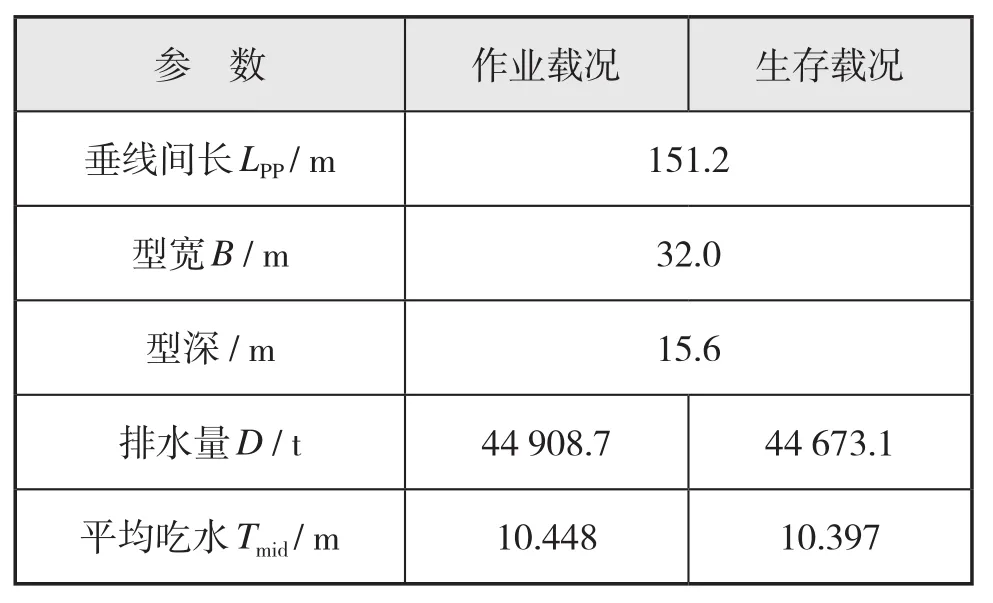
表1 钻井船主尺度参数
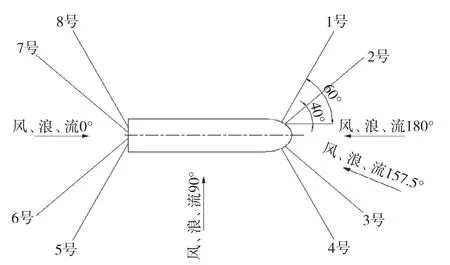
图1 锚泊系统布置图
钻井船采用8根锚索(分为4组、每组2根),这2根锚索与船体中线的夹角分别为40°和60°。锚泊系统布置如图1所示。每一根锚索由钢丝绳和锚链组成。与船体相连的一段为钢丝绳,与锚相连的一段为锚链。锚索参数见表2。

表2 锚索参数
3 环境条件
深水钻井船作业水深1 500 m,作业海域环境条件见表3。在进行锚泊定位分析计算时,波浪谱采用JONSWAP谱,风采用API风谱,流采用定常流。对于多点系泊,当风、浪、流等环境载荷方向相同时,锚索受力最大,因此本文计算时也设定风、浪、流、方向相同,见图1。
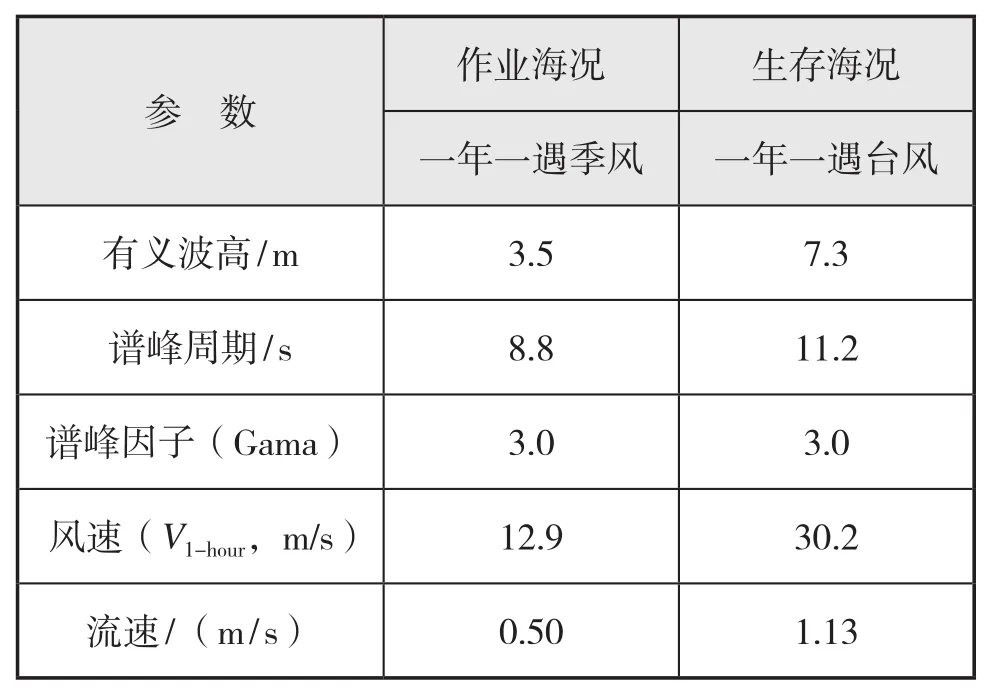
表3 设计环境条件
4 结果与分析
文中分别采用BV船级社基于准动态方法开发的ARIANE软件以及DNV船级社基于动态耦合分析方法开发的DeepC软件计算了一年一遇季风和一年一遇台风情况,分别在迎浪、首斜浪和横浪下,完整系泊和单根锚索(第四根)的破断工况,以及钻井船运动偏移、导缆孔处锚索张力和锚泊点处锚索张力。本文仅以首斜浪(风、浪、流同向且为157.5°)为例,给出计算结果,其他方向结论与之相同。

图2 作业工况完整系泊时结果比较

图3 作业工况单根锚索破断时结果比较
图2 — 图5给出了采用准动态方法和动态耦合方法开展的深水钻井船锚泊定位分析结果比较。图中导缆孔处张力和锚点张力均为第三根锚索受力。从图中可以看出,准动态方法计算出的船体运动偏移较动态耦合分析方法偏大,导缆孔处和锚点处的锚索张力偏小。这主要是由于耦合的影响:准动态方法每一时间步长内计算出的锚索张力作用到船体运动上,船体运动未引起锚索张力变化;动态耦合方法在每一时间步长内考虑两者之间的相互影响,反复迭代,直至结果收敛。上述四种工况下的计算结果如下:一年一遇季风海况,完整系泊时,准动态方法和动态耦合分析方法得到的船体运动偏移相差最大(为15.54%);一年一遇台风海况,单根锚索破断时,船体运动偏移相差最小(为2.51%);一年一遇台风海况,完整系泊时,准动态方法和动态耦合分析方法得到的导缆孔处锚索张力相差最大(为23.46%);一年一遇季风海况,单根锚索破断时,导缆孔处锚索张力相差最小(为2.41%);一年一遇台风海况,完整系泊时,准动态方法和动态耦合分析方法得到的锚点处锚索张力相差最大(为34.16%);一年一遇季风海况,单根锚索破断时,锚点处锚索张力相差最小(为6.61%)。
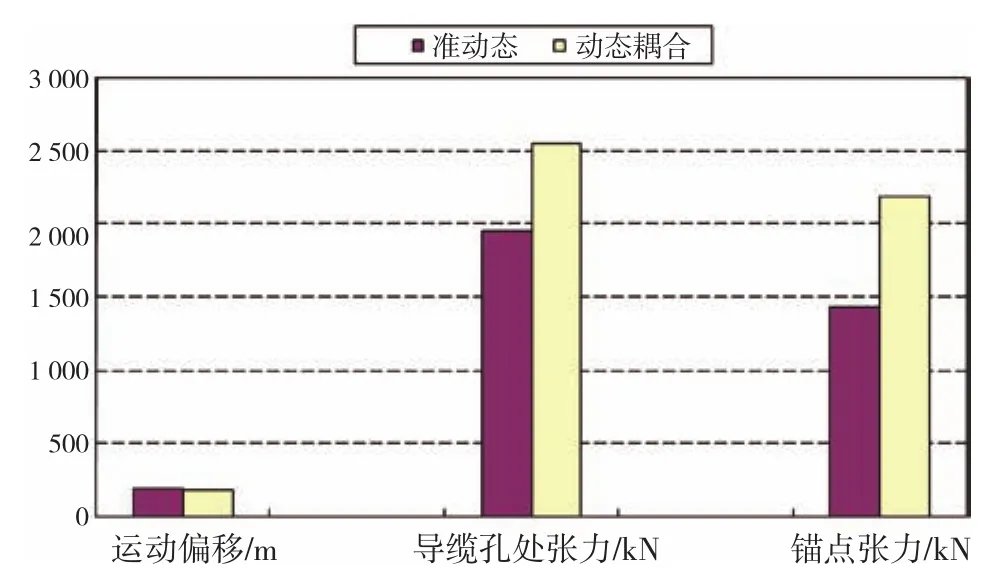
图4 生存工况完整系泊时结果比较

图5 生存工况单根锚索破断时结果比较
准动态方法在计算时忽略了船体阻尼系数和锚索动力等的影响,而动态耦合分析方法均考虑了这些因素的影响,因此动态耦合分析方法计算出的结果更接近真实结果。在工程应用中,考虑到准动态方法和动态耦合方法计算结果的差别,BV船级社规范NR493[8]规定,准动态方法锚索张力安全系数不小于1.75,动态方法安全系数不小于1.67。由于动态耦合分析方法计算耗时较长,在进行锚泊系统设计的初始阶段,通常采用准动态方法进行计算,得出对锚泊系统影响最大的恶劣海况,再对恶劣海况采用动态耦合分析的方法计算。
5 结 论
本文采用准动态和动态耦合两种方法对作业于1 500 m水深的钻井船开展锚泊定位分析,分别计算了一年一遇的季风和一年一遇的台风情况下,完整锚泊和单根锚索破断时的钻井船船体运动偏移、导缆孔处锚索张力和锚点处的锚索张力。通过对两种方法的计算结果进行比较,研究得出各自的特点:准动态方法同动态耦合分析方法相比,具有一定的精度。在深水钻井船锚泊系统设计的初始阶段可采用其对各种工况开展锚泊定位分析,而后再对恶劣海况采用动态耦合分析方法计算,从而高效准确地设计出合理的系泊系统。
[1] API. Recommended Practice 2SK for Design and Analysis of Stationkeeping Systems for Floating Structures[S].2005.
[2] 何进辉,张海彬.深水钻井船动力定位能力分析方法研究[J].海洋工程.2014(1): 25-31.
[3] 麻翠荣.深水钻井船船型开发及总体性能分析[D].哈尔滨:哈尔滨工程大学,2010.
[4] 曲媛.深海钻井船的总体方案分析研究[D].哈尔滨:哈尔滨工程大学,2010.
[5] BV. Ariane 7 Theoretical Manual [S]. 2007.
[6] 黄祥鹿,陆鑫森. 海洋工程流体力学及结构动力响应[M]. 上海:上海交通大学出版社,1992.
[7] Norwegin Marine Technology Research Institule. Marintek Report:SIMO-Theory Manual Version 3.4[R]. 2004.
[8] BV. Classification of Mooring Systems for Performanent Offshore Units[S]. 2012.
On mooring position analysis method for deep-water drilling ship
WEI Yue-feng PAN Fang-hao
(Marine Design & Research Institute of China, Shanghai 200011, China)
The quasi-dynamic method and the dynamic coupled method are adopted to perform mooring position analysis of a deep-water drilling ship, which operates in the water depth of 1 500 m. The characteristics of the two methods are studied by comparison between the two methods. It shows that the efficiency and the precision of the mooring system design can be improved by the application of the different mooring position methods in the relevant design stage.
deep-water drilling ship; mooring position; quasi-dynamic; dynamic coupled
U653.2
A
1001-9855(2016)04-0001-04
10.19423 / j.cnki.31-1561 / u.2016.04.001
2016-03-16;
2016-04-29
魏跃峰(1981-),男,博士,工程师,研究方向:船舶及海洋工程水动力性能及系泊定位。
潘方豪(1978-),男,研究员,研究方向:船舶及海洋工程舾装研究设计。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28 08:19:52
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
重型机械(2020年2期)2020-07-24 08:16:16
中国航海(2019年2期)2019-07-24 08:26:40
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05 02:19:55
焊接(2015年9期)2015-07-18 11:03:51
江苏科技大学学报(自然科学版)(2015年3期)2015-03-07 08:27:44
海军医学杂志(2015年2期)2015-02-27 13:47:42
中国舰船研究(2014年6期)2014-05-14 06:45:17
原子能科学技术(2014年1期)2014-02-28 22:17:12