自航模运行轨迹自动跟踪系统研究
2016-09-09 01:32:06冒如权海军驻上海地区舰艇设计研究军事代表室上海200011
船舶 2016年4期
冒如权(海军驻上海地区舰艇设计研究军事代表室 上海200011)
自航模运行轨迹自动跟踪系统研究
冒如权
(海军驻上海地区舰艇设计研究军事代表室 上海200011)
通过对自航模运行特点的研究,研制出一套利用伺服系统驱动的单台摄像机自动跟踪系统,主要由水平旋转伺服系统、垂直旋转伺服系统和安装在伺服系统之上的工业相机组成。系统对图像进行采集和处理,并与伺服系统形成闭环。当船模成像到达图像正中心后,采集当前水平与垂直伺服系统的角度,计算当前船模坐标,并与上一坐标点进行关联,绘制运行路径。通过实际测试,该系统运行稳定,轨迹定位精度满足工程要求。
自航模;轨迹;跟踪系统;伺服务器;图像处理
引 言
在自航模试验中,自航模运动轨迹的准确获取对验证自航模的操纵性至关重要。传统方法是人工光学跟踪,即人工操纵望远镜,在自航模航行过程中,使自航模始终位于望远镜的中心,通过机械或电气记录望远镜的调节过程参数,进而推算出自航模。此法优点是结构简单、造价低廉。但由于是依靠人的感官来判断和操纵,人从视觉获取到大脑判断,然后再操纵跟踪设备,延时约1 ~ 2 s,会产生精度、实时性、可靠性等多方面的问题。
近年来,随着机器视觉的发展,利用图像识别技术的自航运行轨迹跟踪系统也常被应用。该系统采用多台摄像机覆盖试验区域,对实验的过程实时录像,并且通过图像识别技术识别各个时刻船模的位置,然后对其位置进行坐标计算,最后对各个坐标位置按先后顺序进行连接,从而绘制出自航模运行轨迹。这种方法由于采用高分辨率摄像机进行图像采集,所以实时性好、精度高,整个处理过程不会超过0.1 s,定位精度可以达到毫米级,能够完全满足自航模试验需求。不过该系统需要部署大量的视觉设备和计算设备,不仅复杂且造价高[1-3]。
通过对以上两种方式的分析,我们综合其优点、克服其缺点,研制出一套利用伺服系统驱动单台摄像机自动跟踪系统[4-5],以结构简单、造价低廉的方式实现高精度轨迹快速定位。
1 系统结构及工作原理
1.1 系统结构
该自动跟踪系统整体结构如图1所示。
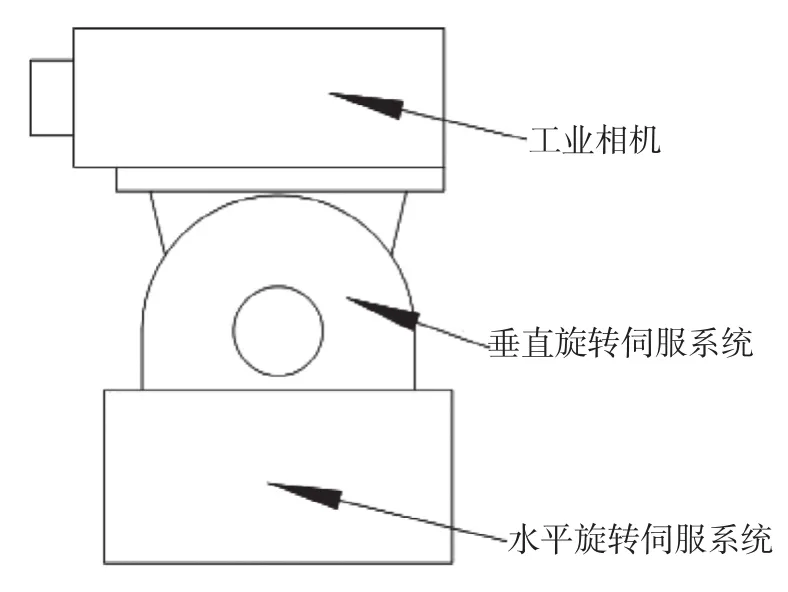
图1 系统整体结构
其由以下三部分组成:
(1)水平旋转伺服系统;
(2)垂直旋转伺服系统;
(3)安装在伺服系统之上的工业相机。
水平旋转伺服系统是在伺服电机驱动下的一个旋转平台,可以水平面360°旋转,并可以实时返回目前的准确角度,其作用是带动相机左右转动。
垂直旋转伺服系统是在伺服电机驱动下的一个旋转平台,可以在垂直方向120°旋转,并可以实时返回目前的准确角度,其作用是带动相机上下转动。工业相机负责捕获自航模的图像采集系统。
1.2 系统工作原理
系统工作原理见图2。如图2(a)所示,相机安装在岸基,其高度为h。系统自动调节相机,让船模成像处于图像的中心,此时,相机、船模、相机在水平面投影成三角关系。由于相机高度固定为h,通过垂直伺服系统可得角度α。此时船模距相机的距离x为:x = h·tgα。
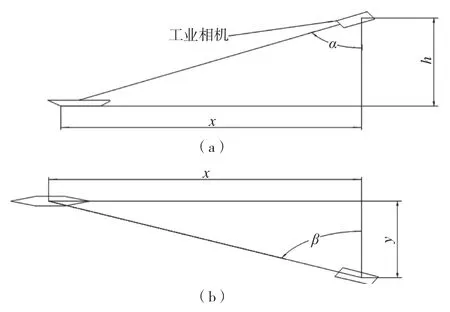
图2 系统工作原理
如图2(b)所示,x已经计算得出,通过水平伺服系统可以得到角度β。此时船模距相机的距离y为:y = x / tg β。
1.3 系统工作流程
系统工作流程分为两部分:一部分是图像采集和处理并与伺服系统形成闭环,调节船模成像到图像的正中心;另一部分是当船模成像到达图像正中心后,采集当前水平与垂直伺服系统的角度,计算当前船模坐标并与上一坐标点进行关联,绘制运行路径。系统工作流程如下页图3所示。

图3 系统工作流程图
2 系统研制关键技术
2.1 图像获取技术
由于自航模呈不规则形状,并且光学环境较为复杂,如果直接使用可见光成像,那么对于在所拍摄图像中的自航模较难识别,并且结果不稳定。为了解决这个问题,我们采用红外成像方法,即在自航模上中心位置安装近红外信号灯(近红外LED),然后采用在近红外波段响应比较灵敏的CMOS相机,并且在相机镜头上安装可见光滤波片,将900 nm以下的光全部截至,这样最终成像为黑色背景上的一个亮斑(近红外信号灯成的像)。这样的画面,对图像处理较为容易,并且稳定性较好[6]。
在本系统中,采用的相机光谱响应曲线如图4所示。 由于该相机在近红外波段响应率很高,并且当其数据传输采用USB 3.0、曝光时间设置为10 ms、帧率约为100 Hz时,图像质量及传输均达到要求。
2.2 图像处理技术
图像处理的目的是在图像中识别出自航模,并且计算出其在画面中的坐标位置。通过2.1节的处理,识别过程简化成在黑色背景下寻找一个发光斑点,其算法大为简化:首先,通过高斯滤波算法对画面进行滤波,消除干扰信号;其次,对画面进行二值化,即通过阈值分割将画面上所有的像素值全部调整成黑或白色;然后,通过canny算子对画面进行轮廓查找,找到的轮廓,即是自航模上的信号灯的像,代表自航模的位置;最后,计算轮廓坐标位置。
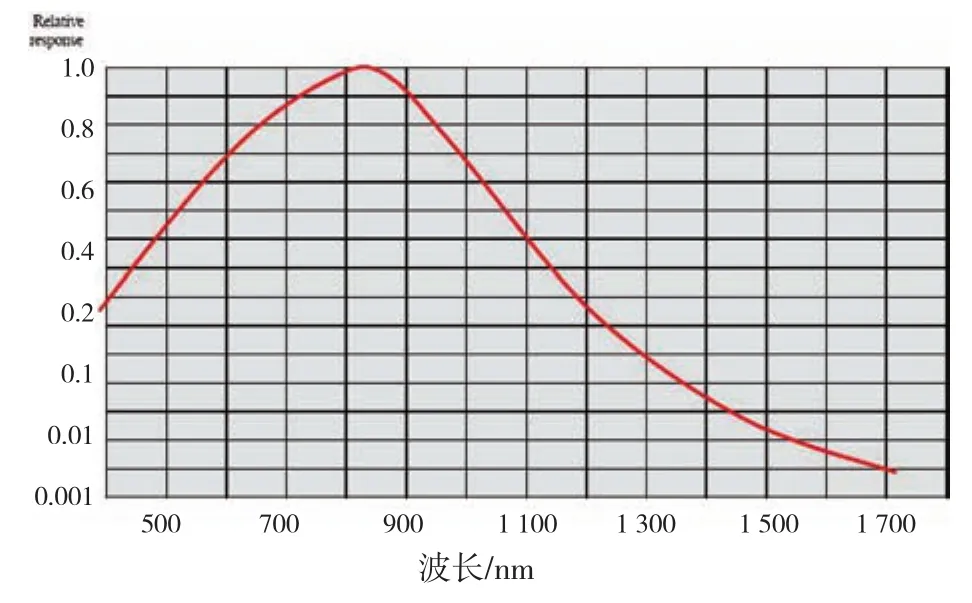
图4 相机的光谱响应曲线
本项目中,高斯滤波的卷积核大小参数为5,canny算子检测的阈值1为80,阈值2为200。
2.3 自航模轨迹绘制
通过2.2 节的处理,我们获得一个自航模在画面中的坐标位置。我们知道,在球面透镜中,只有通过光轴的光是直线传输的,即必须让自航模成像在画面正中心,才能保证相机瞄准了自航模,才能使用2.2节的算法来计算其位置。因此,当得到自航模坐标后,我们首先要判断此坐标在不在画面正中心。如果在正中心,则表示已经瞄准,那么就将目前的坐标移至下一步进行轨迹计算;如果不在正中心,则需要调整水平伺服系统和垂直伺服系统,使坐标到达画面正中心。
伺服的调整算法,采用模糊控制算法(即比例算法)。模糊控制是相对于精确控制的概念。其提出的背景是影响系统执行结果的变量过多,并且之间相互耦合;改变一个参数会影响其他参数的变化,所以,各参数对运行结果无法进行精确的数学描述。
在这种条件下,通过分析或实验找出一个对执行结果影响贡献值最大的输入参数,并在一定范围内修改这个输入参数;然后对实际运行结果和期望运行结果的误差进行分析,以此误差作为修改输入参数的依据,并通过实验确定一个系数,使系统运行结果误差呈收敛趋势。在此前提下,经过数次迭代,运行结果误差便可达到我们的要求。
举个简单的例子,我们在洗澡时调节水的过程就是一个典型的模糊控制算法——先根据经验给一个初始的阀门位置,然后用手测试水温。如水过热,就将阀门向冷水端转;如水过冷,就向热水端转。通过几次调节,就可获得我们期望的水温。此过程中,旋转阀门的次数是由我们根据实际水温与期望水温的差值决定的:差值越大,旋转次数越多。量化的分析水温差与转动角度,发现两者存在线性关系,这个线性的斜率即为比例系数。只不过此处的系数是大脑根据经验而获得。
在该系统中,控制的具体思路为:分别计算当前坐标与画面中心坐标的水平和垂直的差值Δx、Δy,分别设置一个合理的比例系数Px、Py(由实验调试得来),使水平和垂直的转速Vx、Vy满足以下关系(Vx=Δx×Px;Vy=Δy×Py)。
将转速输出给伺服系统、伺服运动、带动相机运动,然后再检测自航模成像坐标是否到达画面中心,经过反复几次迭代,就可以将自航模坐标调整到画面中心。通过数据采集软件得到各离散的坐标点,按照时间顺序将这些点依次连接,便可获得自航模运动轨迹。
3 系统功能验证
为验证该系统的测量精度,本文将船模分别运行直线运动到5个点并停留,然后采用人工测量的方式进行坐标测量,并与系统测量结果进行对比,获得的结果如表1所示。
经过对比,五组数据的最大误差为12,要求比较高的自航模要求轨迹定位精度在30 mm,所以本系统可以满足自航模实验需求。
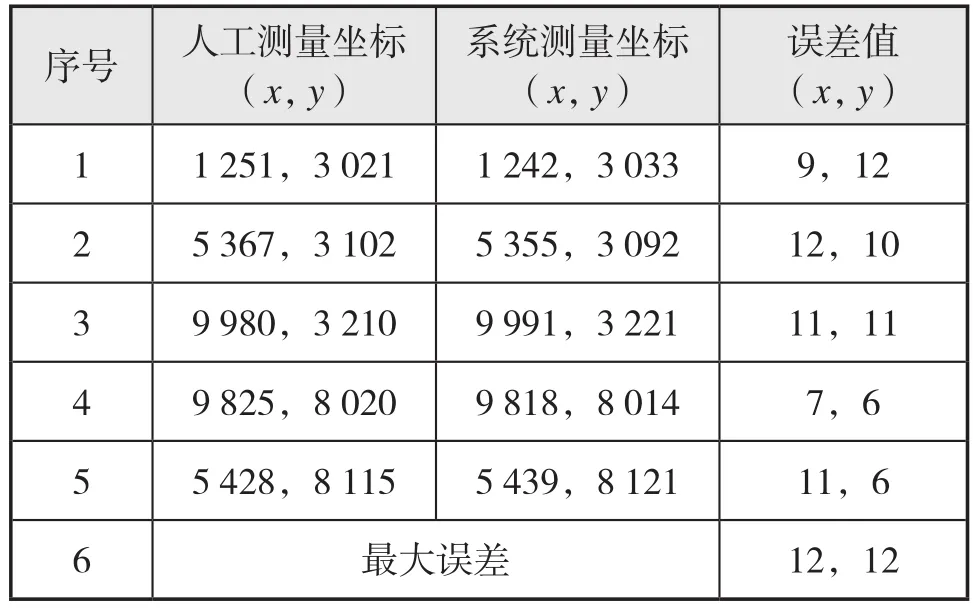
表1 测试结果mm
4 结 论
通过研究自航模运行特点(即实验环境特点),研制出一套涵盖红外光学、图像识别算法、伺服系统等技术领域的运行轨迹跟踪系统,经过测试,该系统能较好满足高要求试验的需求。然而在研制过程中,仍然发现该系统存在某些不足之处:如自航模运行速度过快时(大于2 m / s),伺服系统跟踪不及时(初步判断是识别算法耗费时间过长所致);若水面波浪过大,船模晃动幅度较大时,定位精度降低(初步判断是曝光时间较长而产生拖影)。我们将针对这些问题开展后续研究,以期妥善解决。
[1] 冯亮,魏军,陈志诚.基于航迹偏差角和航向差的自航模运动轨迹控制方法研究[J].船海工程,2012(2):22-25.
[2] 王波,毕毅,李和平.水声式自航模运动轨迹实时测量系统[J].船舶工程, 2003(2):12-14.
[3] 齐小伟,任光.基于领导跟随的船舶航迹控制[J].船舶, 2016(1):92-99.
[4] 张磊,苏为洲.伺服系统的反馈控制设计研究综述[J].控制理论与应用, 2014(5):32-35.
[5] 万鸿俊,魏天水,刘莉.直线电机伺服系统的设计与应用研究[J].机械设计与制造, 2006(12):17-19.
[6](美)冈萨雷斯. 数字图像处理[M].北京:北京电子工业出版社. 2009.
On automatic tracking system of motion trajectory for self-propelled ship model
MAO Ru-quan
(The Naval Deputy of Naval Ship Design and Research Room in shanghai District, Shanghai 200011, China)
A set of servo-controlled single camera automatic tracking system is developed through the study of the motion characteristics of a self-propelled ship model. The automatic tracking system consists of the horizontal rotation servo, the vertical rotation servo and the industrial camera installed on the servo system. The images are collected and processed to form a closed loop with the servo system. When the imaging of the ship model reaches the picture centring, the angles of the horizontal and vertical servo system are collected to calculate the current model coordinates. The motion trajectory is then drawn by linking to the former coordinate point. This system runs stably through the practical test, and its trajectory positioning precision can meet the engineering requirements.
self-propelled ship model; trajectory; tracking system; servo; picture processing
U666.1
A
1001-9855(2016)04-0074-04
10.19423 / j.cnki.31-1561 / u.2016.04.074
2016-02-23;
2016-05-04
冒如权(1979-),男,工程师,研究方向: 船舶电气自动化。
猜你喜欢
微型电脑应用(2022年12期)2023-01-30 13:40:26
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
测控技术(2018年12期)2018-11-25 09:37:44
儿童故事画报·自然探秘(2017年3期)2017-06-29 05:29:40
舰船科学技术(2016年1期)2016-02-27 15:39:15
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11
儿童大世界(2015年3期)2015-05-05 20:43:00
弹箭与制导学报(2015年1期)2015-03-11 15:32:18
航海(2014年6期)2014-12-12 10:36:03
语文世界(小学版)(2014年3期)2014-08-02 17:15:33