立式风洞全视场尾旋姿态测量技术研究
2016-08-31 12:06:13秦三春熊建军
实验流体力学 2016年6期
马 军,宋 晋,刘 蓓,秦三春,熊建军,蒋 敏
(1.中国空气动力研究与发展中心,四川绵阳 621000;2.重庆大学自动化学院,重庆 400044)
立式风洞全视场尾旋姿态测量技术研究
马 军1,*,宋 晋1,2,刘 蓓1,秦三春1,熊建军1,蒋 敏1
(1.中国空气动力研究与发展中心,四川绵阳 621000;2.重庆大学自动化学院,重庆 400044)
尾旋运动是飞机的一种非正常的极限飞行状态,复杂并且危险,极易造成飞行事故。在立式风洞中开展尾旋实验是研究尾旋现象的主要技术手段之一,目的是为了获取实验过程中模型飞机的姿态角,用于对其尾旋特性进行分析。针对尾旋实验运动状态的特点,以及双目测量系统在以往实验应用中的缺陷,设计了一种全视场测量方案,并围绕其关键技术问题开展了研究,使用编码标记识别技术实现特征标记的自动识别,通过基于刚体的三维重建技术实现模型姿态的测量,采用基于共同基准平面的数据标定方法实现多视角姿态数据的有效融合。通过立式风洞尾旋实验验证了该技术的有效性及可靠性,实验结果曲线完整,图像利用率达到了95%,为尾旋运动特性分析提供了更加丰富的数据支撑。
尾旋;立式风洞;编码标记;全视场
0 引 言
在立式风洞中开展尾旋自由飞实验是研究失速尾旋现象的一种重要的手段,实验主要获取的参数是尾旋过程中模型飞机的姿态角,国内外相关研究机构大多数采用基于机器视觉的技术进行研究[1-8]。基于机器视觉的尾旋姿态测量方法通过在模型机身上粘贴圆、十字等特征标记,识别并计算这些标记点的三维坐标,通过坐标值来拟合模型的横轴和纵轴,再应用三角函数关系来计算尾旋姿态参数。但由于尾旋实验属于动态实验,一方面,模型运动范围较大,标记的位置会随着模型的运动出现大幅度的移动,标记匹配难度大,无法使用位置信息进行判别。虽然可以通过多个标记之间的几何位置关系来作为判别条件,对于一些典型姿态该方法能起到一定的作用,但尾旋实验中模型的姿态是时刻变化的,该判别条件在大多数非典型姿态下都是失效的,而对于立体视觉技术而言,标记区分错误会导致图像的匹配错误,进而解算出错误的姿态角。另一方面,标记容易被遮挡,测量视场存在盲区。双目测量系统的2部相机固定安装在某一位置,而实验过程中模型处于旋转运动状态,模型表面粘贴的标记容易被遮挡,使得采集图像中缺少用于姿态解算的标记位置信息。此外,当模型运动幅度较大时,尤其是尾旋改出的时候,模型往往会飞出测量相机的视场范围,虽然调整镜头放大视场可以将整个尾旋过程限定在视场之内,但这会使模型上的标记在图像中所占像素太少,不能准确识别标记。
正是由于标记遮挡、视场盲区和多标记区分匹配难度大等问题,导致尾旋运动姿态测量数据不连续、不完整,影响尾旋特性的分析,需要设计更加有效的方法,对该项测量技术进行改进和完善。
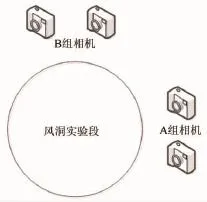
图1 系统相机布局设计Fig.1 System cameras arrangement
1 总体方案设计
针对上述尾旋姿态测量方法中存在的问题,在双目测量系统的基础上设计提出了全视场风洞尾旋姿态测量方案。全视场测量是指覆盖尾旋运动全过程全范围的姿态测量。由于尾旋实验中模型运动范围较大,一组双目测量系统的视场范围有限,只能侧重于稳定尾旋或尾旋改出阶段,无法兼顾两者,且从单一的测量视角采集到的图像有时会出现标记遮挡现象,造成了数据丢失。因此提出了一种采用2组双目测量系统协同工作的方案,使2组系统的视场分别侧重于稳定尾旋和尾旋改出阶段,同时又有一定程度的交叉,全视场测量系统的视场覆盖尾旋运动的全过程,且从2个视角采集图像,可以消除采集角度不佳及标记被遮挡的所带来的影响。
1.1 测量视场布局
系统布局采用4部CCD相机,分为A、B 2组,每组各2部相机,分别进行相机标定,形成2组双目测量子系统,4部相机通过外部TTL同步信号实现同步触发采集。其中A组主要测量稳定尾旋阶段,将视场聚焦在实验段中心。B组主要测量尾旋改出阶段,与A组相机大致呈90°夹角,视场聚焦在实验段边缘处,如图1所示。
1.2 硬件系统设计
测量系统硬件采用PXI-E总线平台,机箱为NI公司的PXI-E 1082,嵌入式控制器为PXI-E 8133,图像采集卡接口采用Camera Link标准,该标准可提供最高为680Mb/s的带宽,满足采集频率为20 Hz时图像的实时传输存储需求。4块NI PXI-1428分别对4部CCD相机进行采集控制,CCD相机采用JAI公司的CV-M4+CL单色相机,最大分辨率1380 pixel×1040 pixel,采集频率24 Hz(全幅面)。
1.3 软件系统设计
测量系统的软件主要包括图像采集模块、参数标定模块、标记识别模块、三维重构模块和数据融合模块。图像采集模块包括单帧抓取及连续采集的功能,单帧抓取模式主要用于测量系统标定,连续采集模式主要用于实验图像的采集与存贮。参数标定模块用于确定测量系统基准,标记识别模块用于编码标记的自动识别,三维重构模块用于模型姿态解算,数据融合模块用于测量结果的衔接融合。
2 关键技术

图2 编码标记Fig.2 Coded marker
2.1 编码标记识别算法
为实现人工标记的自动准确匹配,本文采用了一种编码标记作为识别目标。编码标记如图2所示。编码标记中心为圆形目标点,周围是与其同心的分段环状,用来对标记进行编码称为编码环带。圆环等分为8份,每份45°,作为一个二进制位。
图像识别算法分为3步:
(1)二值化与边缘检测。标记图像的灰度直方图具有双峰的特征,使用自适应的最大类间方差法(OTSU法)[910],把图像的灰度数按灰度级分成目标和背景2个部分,根据计算所得方差来寻求一个适当的灰度值进行划分,可实现自动选取阈值进行二值化。再通过Canny算子进行边缘检测,通过一阶微分的极大值确定边缘点[11]。
(2)基于二次曲线的椭圆中心定位。编码标记点的内部圆形经CCD成像后变为椭圆,因此对圆心的定位操作也就是检测椭圆中心点的操作[12]。设椭圆方程为:

获得参数向量矩阵β=[A,B,C,D,E,F],进而计算中间参数:
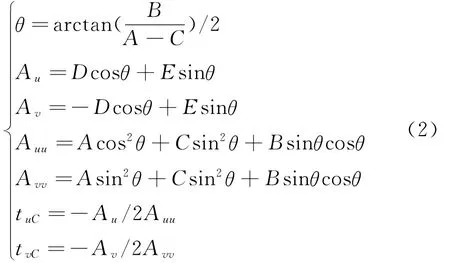
获取椭圆中心在图像上的二维坐标Cu、Cv如下:

(3)编码环带解码。找到圆心在图像坐标系下的坐标值,对中心椭圆进行逆仿射变换,使其成为单位圆。并根据圆心角计算该编码环带上所包含的0或1的个数,记录成8位的二进制,移位取最小数值作为编码值。
通过以上3个步骤可以完成编码标记的识别,识别效果如图3所示。

图3 编码标记识别效果Fig.3 Coded marker recognition effect
2.2 特征点三维重建
双目测量系统利用立体视差的原理,使用已经标定过的2部相机获得同一场景点P的2幅左右不同的图像I1、I2,通过寻找P点在左右2幅图像上的匹配像点P1(U1,V1)和P2(U2,V2),再通过标定参数来获取该点的空间三维坐标信息。
空间点P在双目测量系统中的成像关系如图4所示。OwXwYwZw为空间世界坐标;C1、C2表示左右2部相机;O1、O2分别为2部相机对应的光心位置。空间点P点在相机C1上成像的图像点为p1,图像的二维坐标为(ul,vl),P点在相机C2上成像点为p2,图像的二维坐标为(ur,vr)。当世界坐标系建立在左相机C1上,以针孔模型为摄像机成像模型,则根据空间几何关系可以推导出空间点P(x,y,z)的三维坐标。
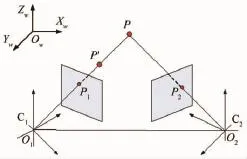
图4 双目测量系统原理Fig.4 Principle of binocular stereo vision
2.3 基于坐标系转换的姿态角算法
模型飞机的姿态角可以通过体轴系和风轴系的坐标轴和平面之间的关系来描述。俯仰角α为体轴系纵轴OpXp与风轴系平面XwOwYw的夹角,可以转化为体轴系纵轴OpXp与风轴系竖轴OwZw之间夹角;偏航角β为体轴系纵轴OpXp在风轴系XwOwYw面的投影与OwXw之间的夹角;滚转角为体轴系横轴OpYp与风轴系平面XwOwYw的夹角γ,可以转化为体轴系横轴OpYp与风轴系竖轴OwZw之间的夹角。
在实验准备阶段,首先利用三坐标测量机获得体轴系中粘贴在飞机上编码标记圆心三维坐标,记为(xi,yi,zi)(i=1,2…n)。在风洞实验中通过双目测量系统获取风轴系下飞机上编码点三维坐标,记为(Xi,Yi,Zi)(i=1,2…n)。对于2个坐标系的关系,只需要找到2个坐标系下3个以上公共三维点就可以计算出2个坐标系的旋转平移关系。设体轴系到风轴系的转换关系如式(4)所示:

要获取参数R和T,只需要3个编码标记点分别体轴系和风轴系下的坐标值便可计算转换参数,计算过程详见文献[13]。将体轴系下的OpXp和OpYp向量转换到风轴系OwXwYwZw下,即:

取单位向量,OpXp=[1,0,0],OpYp=[0,1,0];OpXp′与OpYp′为转换到风轴系下的向量;OpXp″为OpXp′在XwOwYw平面上的投影,R,T为OpXpYpZp到OwXwYwZw的转换参数。设OwZw=[0,0,1],则3个角度可以通过式(6)获得:
2.4 模型姿态数据融合方法
A、B 2组立体视觉系统虽然是分别标定,但采用的方法均为张正友提出的平板标定法[14],该算法建立的测量坐标系轴向取决于第一张标定图片。因此只要2组立体视觉系统共用第一张标定图像,那么2组测量系统的标定基准坐标系就是统一的,虽然经过坐标转换后的测量坐标系原点分别落在2组双目系统的左相机处,但坐标轴系还是方向一致的。尾旋实验过程中的3个姿态角都是相对于坐标轴方向解算出的角度,因此在2组相机的公共视场内获取的结果数据是一致的。A、B 2组系统同步采集图像,获取2组数据,由于2组系统的相机视场既有交汇又各有侧重点,因此除公共视场内的相同点外,2组数据中的断点大致可形成互补的形态,通过2组数据的拼接组合,就形成了一条新的数据曲线,消除了断点,提高了数据完整性。
具体方法为:2组CCD相机所获取的数据是相互独立的,当只有其中一组相机获取的图像能够识别计算出姿态数据时,则选取该组数据作为有效数据;当2组相机都获取到姿态数据时,则需要依据测量误差量值,选取误差较小的数据点作为有效数据。姿态角计算精度取决于三维坐标重建的精度,因此,在判定姿态角测量精度时,将风洞坐标系下重建的三维特征点坐标对齐到机身坐标系下的三维特征点坐标,然后比较同一坐标系下对应三维点的点距,即:

式中:ei表示坐标重建的误差,代表了姿态角的测量误差。选择误差值较小的点作为有效数据点,实现姿态测量数据的有效融合。
3 实 验
3.1 实验设备
在Φ5m立式风洞开展尾旋验证实验,所采用的实验设备主要如下:
(1)CCD相机:用于采集原始实验图像。
(2)PXI控制系统:用于控制相机,计算数据。
(3)三坐标测量仪:测量编码标记在机体坐标系中的坐标值。
(4)8位编码标记帖:粘贴在模型表面用于识别的人工标记。
3.2 实验内容及数据分析
为保障该技术针对不同的尾旋状态均有较好的实验效果,通过全视场系统和双目测量系统开展了不同状态的对比实验,以满足考核的全面性,具体如下:正飞平尾旋2次;倒飞平尾旋2次;倒飞振荡尾旋1次。4个CCD摄录的典型实验图像如图5所示,典型对比数据曲线如图6所示,实验数据统计如表1所示。

图5 4个CCD摄录的典型实验图像Fig.5 Typicaltest images of 4 CCD cameras
通过图6的对比曲线可以发现双目测量系统缺失的数据点较多,图像利用率在60%左右,而全视场系统获取的数据曲线断点较少,根据表1的统计数据,在不同的尾旋状态下,图像利用率可达到95%。
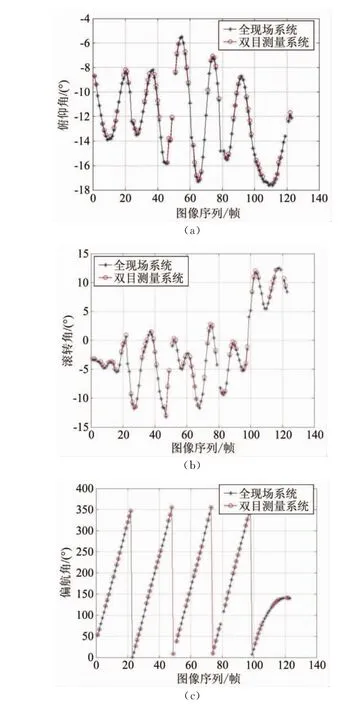
图6 典型对比数据曲线Fig.6 Curves of typical contrastive data

表1 实验数据统计Table 1 Statistics of test data
4 结 论
针对尾旋运动状态的特点,设计了一种基于编码标记识别技术和2组双目测量系统的全视场测量方案,并围绕其关键技术问题开展了研究,采用编码标记识别技术实现特征标记的自动识别,采用基于刚体的三维重建技术实现模型姿态的准确测量、采用基于共同基准平面的数据标定方法实现多视角姿态数据的有效融合。实验结果表明该技术能够为尾旋运动特性分析提供更加丰富的数据支撑。
[1]罗武胜,李沛,李冠章,等.基于计算机视觉的尾旋运动姿态测量方法[J].兵工学报,2009,30(6):820-824.Luo W S,Li P,Li G Z,et al.A method of measuring poses of the aircraft model based computer vision[J].Acta Armamentar,2009,30(6):820-824.
[2]宋晋,马军,蒋敏,等.基于立体视觉系统的风洞尾旋试验测量方法研究[J].计算机测量与控制,2011,19(11):2646-2648.Song J,Ma J,Jiang M,et al.Measurement method research of spin test in wind tunnel based on stereo vision system[J].Computer Measurement &Control,2011,19(11):2646-2648.
[3]黄会明,刘先勇,马军,等.飞机尾旋三维测量试验的改进方法[J].实验流体力学,2013,27(2):77-81.Huang H M,Liu X Y,Ma J,et al.The improvement method in 3-D measurement of airplane free-spin[J].Journal of Experiments in Fluid Mechanics,2013,27(2):77-81.
[4]Yan S.Theoretic research on effective viewing field of spin vision measurement system[J].ProcSpie,2008,7133:71330N-71330N-6.
[5]Li P,Luo W S,Li G Z,et al.Stereo vision for spin tests in the vertical wind tunnel[C]//First IEEE International Conference on information Science and Engineering,IEEE Computer Society,2009.
[6]Song J,Ma J,Jiang M,et al.Measurement based on machine vision for spin test in vertical wind tunnel[C]//Electrical &E-lectronics Engineering,2012.
[7]Shorts M R,Snow W L.Videometric tracking of wind tunnel aerospace models at NASA Langley research center[C]//The Thompson Symposium,University of York,1996:673-689.
[8]Michael Fremaux C.Spin-tunnel investigation of a 1/28-scale model of the NASA F-18 High Alpha Research Vehicle(HARV)with and without vertical tails[R].NASA contractor report,1997.
[9]胡颖.Otsu算法的研究及改进[J].枣庄学院学报,2009,26(5):68-72.Hu Y.Study and improve of Otsu algorithm[J].Journal of Zaozhuang University,2009,26(5):68-72.
[10]胡敏,李梅,汪荣贵.改进的Otsu算法在图像分割中的应用[J].电子测量与仪器学报,2010,24(5):443-448.Hu M,Li M,Wang R G.Application of an improved Otsu algorithm in image segmentation[J].Journal of Electronic Measurement and Instrument,2010,24(5):443-448.
[11]王克刚,耿国华.Canny边缘检测改进中的自适应平滑与增强[J].西安科技大学学报,2008,28(3):577-579.Wang K G,Geng G H.An improved Canny edge detection based on adaptive smoothing and enhancement[J].Jorunal of Xi’an University of Science and Technology,2008,28(3):577-579.
[12]黄会明,刘先勇,段康容.用于机器视觉系统设计的基于二次曲线的椭圆估计[J].传感器世界,2011,(6):10-14.Huang H M,Liu X Y,Duan K R.Estimation of ellipse based on the conic for machine vision[J].Sensor World,2011,(6):10-14.
[13]王保丰,徐宁,余春平,等.两种空间直角坐标系转换参数初值快速计算的方法[J].宇航计测技术,2007,27(4):20-24.Wang B F,Xu N,Yu C P,et al.Quick arithmetics for the transformation approximation of two space rectangular coordinate systems[J].Journal of Astronautic Metrology and Measurement,2007,27(4):20-24.
[14]Zhang Z Y.A flexible new technique for camera calibration[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22(11):1330-1334.
Design and implementationfor full field of view measurement scheme in vertical wind tunnel
Ma Jun1,*,Song Jin1,2,Liu Bei1,Qin Sanchun1,Xiong Jianjun1,Jiang Min1
(1.China Aerodynamics Research and Development Center,Mianyang Sichuan 621000,China;2.School of Automation Chongqing University,Chongqing 400044,China)
Spin is a kind of abnormal state of aircraft,complicated and dangerous.It can easily cause flight accident.Spin experiment in vertical wind tunnel is one of the main research technical means.The purpose is to obtain the attitude angle of model aircraft in experimental process,for analysis of its spin characteristics.The paper concentrates its attention on the characteristics of spin motion and the application defect of binocular measurement system in previous experiments.The full field of view measurement scheme is designed,and the research for the key technologies is carried out.The coded marker recognition technology is adopted to realize feature automatic identification.The 3D reconstruction technology based on rigid body is adopted to realize the measurement of model attitude.The date calibration based on the same reference plane is adopted to realize the effective data fusion within multiple angles of view.The effectiveness and reliability of the measurement technology is proved by spin experiment in vertical wind tunnel.The experiment curves are complete,and the image utilization reaches 95%.It provides richer data for characteristics analysis of spin phenomenon.
spin;vertical wind tunnel;coded marker;full field of view
V211.71
A

(编辑:李金勇)
1672-9897(2016)06-0066-06
10.11729/syltlx20160087
2016-06-02;
2016-10-11
*通信作者E-mail:292384225@qq.com
Ma J,Song J,Liu B,et al.Design and implementationfor full field of view measurement scheme in vertical wind tunnel.Journal of Experiments in Fluid Mechanics,2016,30(6):66-70,104.马 军,宋 晋,刘 蓓,等.立式风洞全视场尾旋姿态测量技术研究.实验流体力学,2016,30(6):66-70,104.
马 军(1974-),男,重庆人,高级工程师。研究方向:软件工程、非接触测量。通信地址:四川绵阳中国空气动力研究与发展中心(621000)。E-mail:292384225@qq.com
猜你喜欢
防爆电机(2022年3期)2022-06-17 01:41:24
中国光学(2021年6期)2021-11-25 07:48:32
学生天地(2020年3期)2020-08-25 09:04:16
船舶标准化工程师(2019年4期)2019-07-24 07:21:06
中国医疗设备(2019年1期)2019-01-15 12:10:54
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
舰船科学技术(2016年1期)2016-02-27 15:39:19
船海工程(2015年4期)2016-01-05 15:53:26
激光与红外(2015年10期)2015-03-23 06:07:18