绕线转子自起动永磁电机斩波起动控制方法
2016-08-30 06:05:26冯桂宏李庆旭戴思锐王帅张炳义
电机与控制学报 2016年8期
冯桂宏, 李庆旭, 戴思锐, 王帅, 张炳义
(沈阳工业大学 电气工程学院,辽宁 沈阳 110870)
绕线转子自起动永磁电机斩波起动控制方法
冯桂宏,李庆旭,戴思锐,王帅,张炳义
(沈阳工业大学 电气工程学院,辽宁 沈阳 110870)
针对绕线转子自起动永磁电机(WRLS-PMSM)PWM斩波调阻起动控制方法进行研究,通过调节转子绕组回路外串等效电阻,使起动平均转矩始终保持在最大值,改善起动性能。将定转子交流电量和阻抗关系折算到直流斩波控制环节,建立PWM斩波调阻准动态数学模型,推导出斩波占空比与转子等效外串电阻关系;总结输出最大合成异步转矩时的转子外串电阻与转速关系,进而得到斩波控制规律;搭建WRLS-PMSM起动性能实验平台,将WRLS-PMSM转子斩波调阻起动与转子自短路起动、鼠笼转子永磁电机直接起动性能进行对比分析,发现采用实时最大异步转矩输出的转子斩波起动方法能够有效提高永磁电机的起动转矩,抑制起动电流,提高牵入能力。
绕线转子自起动永磁电机;起动控制;PWM斩波;电阻调节;最大异步转矩
0 引 言
绕线转子永磁电机(WRLS-PMSM)具有自起动能力,与传统鼠笼转子永磁电机相比,主要区别一方面体现在转子绕组结构的改变,另一方面可以通过调节转子外串电阻改变起动过程中的异步转矩,从而提高起动性能。对于很多定速驱动工况,具有自起动能力的鼠笼转子永磁电机,相比异步电机和变频起动永磁电机在稳态性能和系统性价比方面优势明显。但是鼠笼转子永磁电机由于转子结构的限制,无法兼顾起动初始时刻的异步转矩和接近同步速时的牵入转矩,进而造成起动能力不足,对于重载或大转动惯量负载工况表现的更加明显。传统方法通常采用转子异型槽的方式加强集肤效应,提高起动能力。在鼠笼转子永磁电机起动性能计算和改进方面,国内外学者进行了很多研究工作。文献[1-3]采用有限元仿真的方法分析了鼠笼转子永磁电机的起动特性。文献[4]提出采用复合材料制造转子导条,通过优化导条结构和材料特性提高起动性能。文献[5-7]从电机本体设计和优化算法方面,依据电磁计算模型对主要性能指标进行改进,取得一定效果。文献[8]采用时步有限元法对鼠笼转子永磁电机起动过程中的最小转矩进行计算,为电机起动性能预测提供依据。以上这些研究主要集中在鼠笼转子永磁电机起动性能计算与提高方面,但是起动与牵入性能的矛盾却始终存在。为此,文献[9-10]提出并研究了采用绕线转子结构的自起动永磁电机,并着重分析了电机磁路结构设计和稳态性能。文献[11]进一步提出了一种增加转子弱磁绕组的方法,抑制发电制动转矩,提高起动能力。采用绕线转子外串电阻的方法提高起动能力,核心在于起动过程中通过PWM斩波的方法合理调节外串等效电阻。而在斩波调阻方面,传统异步电机的调速系统已经进行了尝试,文献[12]早在上世纪70年代就提出了感应电机的转子斩波调速方法。在此基础上,文献[13]提出了一种抑制关断损耗的斩波调阻电路,取得较好效果。文献[14-15]也对绕线异步电机的斩波调速系统进行了研究。
本文在绕线异步电机斩波调速系统的基础上,结合WRLS-PMSM起动过程中合成异步转矩随转速的变化规律,建立并分析了基于最大实时异步转矩的斩波起动控制方法,并通过样机实验进行了验证。
1 WRLS-PMSM转子回路斩波控制模型
WRLS-PMSM定转子绕组之间虽然没有直接的电联系,但通过主磁通实现电磁耦合,这种耦合关系表现在定转子双边电量互相影响。由于斩波控制过程要在转子整流环节进行,同时考虑到WRLS-PMSM起动过程的复杂性,这里仅建立转子回路斩波控制准动态数学模型,即将电机从静止到同步转速的动态过程分别用稳定运行在不同转速时的阻抗参数模拟。此法虽然忽略了瞬态电抗和饱和因素,但能计及转速对电抗的影响,基本可以满足工程计算需要。本文通过三个步骤完成该模型的建立。
1.1折算到转子交流侧的等效电路


(1)

图1 WRLS-PMSM转子侧每相等效电路Fig.1 Equivalent circuit of each phase of WRLS-PMSM in the rotor side

图2 WRLS-PMSM转子侧三相等效电路Fig.2 Equivalent circuit of three phase of WRLS-PMSM in the rotor side
1.2折算到转子直流侧的等效电路
所涉及的转子绕组整流环节为三相不可控整流,其自然换向点位于线电压差值过零点附近。经推导可得不考虑换流损失下的整流电压为

(2)
由于转子电感的存在,整流器件在开通关断过程中不可避免的存在换流环节,实际整流输出电压会随着换流过程持续时间的增加而降低。根据绕线异步电机串级调速系统相关数据,对于不同转差率和电机阻抗参数条件下,换流重叠角变化范围在25°~75°之间,这里取平均值γ=50°作为等效换流重叠角。
根据以上分析可知,由于换向带来的电压损失可以通过对换流重叠角γ时间段内的电流积分进行计算,可得

(3)
由于转子三相绕组按照分时导通的原则工作,每个整流周期同时有两相绕组导通,整流电流在转子自身绕组电阻上的电压损耗在折算过程中也需要考虑。由于电机转子侧感抗参数的改变会造成换流过程的不确定性,这里仍取平均值γ=50°。从而可得,由于换流重叠角带来的转子电阻压降如下:

(4)
综合以上折算参数,可将图3(a)所示转子整流电路折算为图3(b)所示直流侧等效电路。图中等效电抗XD=Xd,等效直流电阻为

(5)
对外等效端口电压UD=ED-ΔED_1-ΔED_2,将式(2)~式(4)带入整理可得

(6)
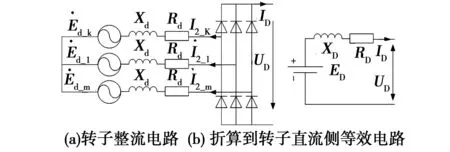
图3 WRLS-PMSM转子侧折算到整流侧等效电路Fig.3 Equivalent circuit converted to the DC side of the WRLS-PMSM in the rotor side
至此,经过定子侧至转子侧以及转子侧至整流侧的两次折算,已将原有WRLS-PMSM转子三相绕组回路电气参数等效为如图3(b)所示的直流电压源和阻抗串联的端口模型,从而为直流斩波调阻数学模型搭建奠定基础。
1.3直流斩波调阻模型
直流斩波调阻模型主要包括转子三相绕组整流网络、外串电阻以及IGBT斩波环节。通过控制IGBT导通和关断时间的比例,即可实现外串电阻实际值的连续变化。理想状态下,IGBT导通时等效电阻为零,IGBT关断时等效电阻为外串电阻。实际工作中,为避免IGBT快速开通和关断过程中出现的电压和电流突变,通常会针对斩波器件增加阻容吸收电路,对于中等功率等级的工况,常用如图4(a)中的RCD型缓冲电路。在IGBT开通瞬间,缓冲电容C通过R向IGBT放电,使集电极电流略微增加而无法突变;而在关断瞬间,电容的稳压作用同样明显,从而抑制了du/dt的变化。文献[13]进一步提出一种可以降低IGBT开通功耗的缓冲电路拓扑结构,如图4(b)所示。由于单向导通的二极管和阻容吸收电路为串联关系,电容放电过程无法经过IGBT,只能在缓冲电路内部进行放电,从而抑制了器件开通功耗。

图4 IGBT关断缓冲电路Fig.4 Buffer circuit for shut off of IGBT


(7)
式中,Tch=Ton+Toff为斩波周期;Ton对应IGBT导通状态持续时间;Toff为关断持续时间;τ1=LD/RD对应导通状态时间常数;τ2=RefC对应关断状态时间常数;τ12=τ1τ2/(τ1+τ2)为合成时间常数;α=Ton/Toff为导通占空比。
以7.5 kW的WRLS-PMSM样机为例,当转子外串电阻为7 Ω时,如采用图4(b)所示缓冲电路,则等效外串电阻与导通占空比存在如图5所示非线性关系。当电机阻抗参数发生变化时,等效电阻计算模型也随之改变。

图5 等效电阻计算模型(抑制开通功耗型缓冲电路)Fig.5 Calculation model of equivalent resistance (Based on buffer circuit with Inhibition consumption)
对于所研究的起动过程斩波控制,由于电机稳态运行时斩波回路不工作,而起动过程瞬间完成,器件开通损耗有限,因此这里采用了基于RCD型缓冲电路的斩波调阻方法,如图6所示。图中IGBT能量吸收电阻R和外串电阻Ref相互独立,因此对外呈现的实际等效电阻与占空比具有较好线性关系。下面分别对IGBT开通和关断两种状态进行分析,如图7所示。

图6 基于RCD型缓冲电路的调阻电路Fig.6 Adjustable resistance circuit of RCD buffer circuit

图7 RCD型缓冲调阻电路两种工作状态下等效电路Fig.7 Equivalent circuit of adjustable resistance circuit
当IGBT导通时,Ref被短路,此时参数满足式(8)。在IGBT从断开向导通过度的瞬间,回路电阻从RD+Ref瞬间降低至RD,但是由于转子回路电感LD的抑制作用,电流逐渐在导通周期内由Imin增加至Imax,此阶段边界条件如式(9)。而在关断周期内,回路电阻又瞬间突变至RD+Ref,电流从Imax逐渐降低至Imin,此时参数满足式(10),对应边界条件如式(11),至此完成一次开断周期。这里虽然忽略了缓冲电路的影响,但后续通过求取电流平均值进而计算等效电阻的方法仍能满足工程计算需要。

(8)
(9)

(10)
(11)


(12)

(13)

(14)
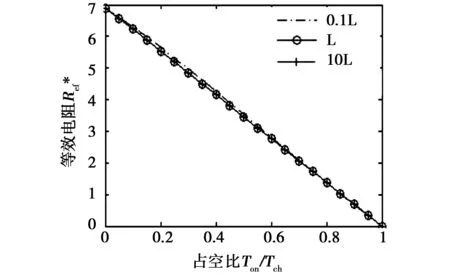
图8 等效电阻计算模型(RCD型缓冲电路)Fig.8 Calculation model of equivalent resistance(Based on buffer circuit of RCD)
对比图5和图8,显然后者所示等效电阻计算模型更加简洁。实际斩波过程中,占空比需要根据转速变化实时调节,如果计算过程过于复杂,就会增加计算量,影响反应速度。更重要的是,当斩波频率较高时,式(14)对应数学模型中实际等效电阻与占空比呈近似线性关系,如图9所示。这就避免了电机阻抗参数变化对等效电阻计算模型的较大影响,系统稳定性更好,因此采用基于RCD型缓冲电路的斩波电路,对WRLS-PMSM的起动控制策略进行研究。

图9 等效电阻计算模型对斩波频率的敏感性(RCD型缓冲电路)Fig.9 Sensitivity of calculation model to chopper frequency(Based on buffer circuit of RCD)
2 PWM斩波控制方案设计
2.1总体方案设计
RCD型缓冲电路的斩波调阻系统整体控制结构如图10所示。系统包括转子绕组,三相整流单元,斩波电路,阻容吸收电路以及外串电阻。WRLS-PMSM起动过程中的稳定转矩主要包括发电制动转矩Tg、正向异步转矩Ta和凸极效应异步转矩Tb,发电制动转矩与转子绕组无关,将合成异步转矩Ta+Tb作为被控对象。

图10 WRLS-PMSM起动控制系统结构图Fig.10 Structure of WRLS-PMSM starting control system
根据电机异步运行状态基本理论可知,在确定转速下,实时合成异步转矩对应的电磁功率与转子绕组铜耗成正比,即满足Pem=Pcu2/s。转子回路增加整流和斩波调阻电路之后,实际转子绕组铜耗除原自身绕组损耗以外,还包括外串电阻损耗。结合图3可得用于计算WRLS-PMSM合成异步转矩的准动态数学模型,如图11所示。对于直流回路,图11(a)中XD作用消失,进一步得到忽略定转子漏抗作用的等效电路,如图11(b)所示。将式(5)进一步整理可得斩波直流回路各电阻分量RD_1,RD_2和RD_3。直流回路合成电阻RD可表示为
(15)

2.2控制方法设计与分析


(16)

图11 直流侧斩波调阻电路模型Fig.11 Adjustable resistance circuit model in the DC side
令dTmec/ds=0,得到最大合成异步转矩对应转速与定转子回路阻抗参数的关系为

(17)
如能在起动过程中,将实际运行转速实时检测并作为转子外串电阻计算模型输入参量,电机即可以最大转矩且近似为恒转矩加速至同步速。由于当斩波频率大于1kHz时,采用RCD缓冲电路的斩波调阻电路中,等效电阻与斩波占空比呈近似线性关系,由此可得到满足实时最大异步转矩输出特性的斩波占空比计算模型为
α=f(n)=

(18)
根据式(18),在高转速阶段所需要的占空比大于1,但实际IGBT斩波工作区仅存在0≤α≤1阶段,如图12中“斩波工作区1”所示。当所需占空比大于1时,IGBT持续导通,强制使得α=1,直至牵入同步转速。在此阶段,转子外部控制回路失去作用,电机依靠转子自身绕组完成牵入同步过程。当转子绕组自身电阻大幅下降时,实际斩波工作区得到拓展,当转子自身电阻下降到20%时,实际斩波工作区延伸至“斩波工作区2”。转子绕组阻值越低,斩波工作区越宽。令式(18)中α=1,可得斩波工作周期对应的最高转速为

(19)

图12 最大起动转矩控制α-s曲线Fig.12 The α-s curve in maximum starting torque control
2.3外串电阻选型
根据式(19),可得斩波调阻控制方案中外串电阻的选择方法,即当转速为零时所需要的外串电阻达到最大值,其阻值为

(20)
此外串电阻只在起动过程参与工作,其功率等级的选择需要综合考虑起动过程功率损耗和工作制情况。外串电阻实时消耗功率与转差率有关,通过对转差积分,可得每次起动过程中外串电阻平均损耗功率为

(21)

3 起动特性实验研究
根据图10所示的WRLS-PMSM起动控制结构,搭建了基于DSPIC芯片的起动控制电路。根据7.5 kW绕线转子永磁电机电磁设计方案中转子感应电压和电流等参数,确定整流和斩波控制环节器件选型。起动性能测试平台如图13。斩波控制电路和WRLS-PMSM样机主要参数如下:斩波控制电路参数为:编码器为1024脉冲/转;整流模块为1 000 V/300 A;芯片为dsPIC30F5015;IGBT为1 000 V/150 A;外串电阻为5 kW/10 Ω;斩波频率为10 kHz。WRLS-PMSM参数为:额定功率为7.5 kW;电压/电流为380 V/13.4 A;频率/转速为50 Hz/1 000 r/min;定子/转子电阻为0.91 Ω/2.32 Ω;定子/转子漏感为2.74 mH/4.49 mH;定转子有效匝数比为0.56。

图13 起动性能测试平台Fig.13 The starting experiment platform
3.1WRLS-PMSM斩波起动实验分析
根据上述中所示电机参数,按照式(18)、式(19)中控制模型,对7.5kW的WRLS-PMSM样机进行斩波起动性能测试。实验结果表明,在60 kVA调压器380 V供电条件下,WRLS-PMSM采用转子绕组自短路直接起动时,最大起动转矩仅为50 N·m。而采用斩波起动控制时,最大起动转矩达到90 N·m。图14为斩波调阻起动时,样机带不同负载起动的转速变化情况。随着负载转矩提高,起动时间逐渐延长,但都能牵入同步。由于发电制动转矩的负面作用和机械惯性存在,起动初始阶段存在一定脉动增速现象。
斩波起动过程中,主控芯片预置计算模型,根据转速信号进行斩波控制。电机从起动至牵入同步过程中,外串电阻呈现断续导通状态,如图15所示。在约120 ms时接收到起动信号,约450 ms时达到理想最高斩波工作速度,此后IGBT持续导通,外串电阻被短路。由于IGBT的存在,转子整流回路电流仍然持续存在,随着转子感应电压变化电流呈现脉动状态,至牵入同步后转子感应电流完全消失,如图16所示。

图14 WRLS-PMSM斩波起动时转速变化规律Fig. 14 Speed change rule with chopping adjustable resistance of WRLS-PMSM

图15 外串电阻电流(100 N·m)Fig.15 Current of the outer series resistance (100 N·m)

图16 转子整流回路电流(100 N·m)Fig.16 Total current of rotor rectifier circuit(100 N·m)
3.2WRLS-PMSM与鼠笼永磁电机对比分析
这里选取了一台与WRLS-PMSM样机相同基座号,且功率和转速也完全相同的鼠笼转子永磁电机,两种电机转子结构如图17所示。其中鼠笼转子永磁电机转子采用梯形槽,充分利用了集肤效应,槽型尺寸和永磁体结构是通过对起动性能优化得到的,基本达到了该型电机的较高起动能力。两种电机的起动性能实验条件也完全相同。
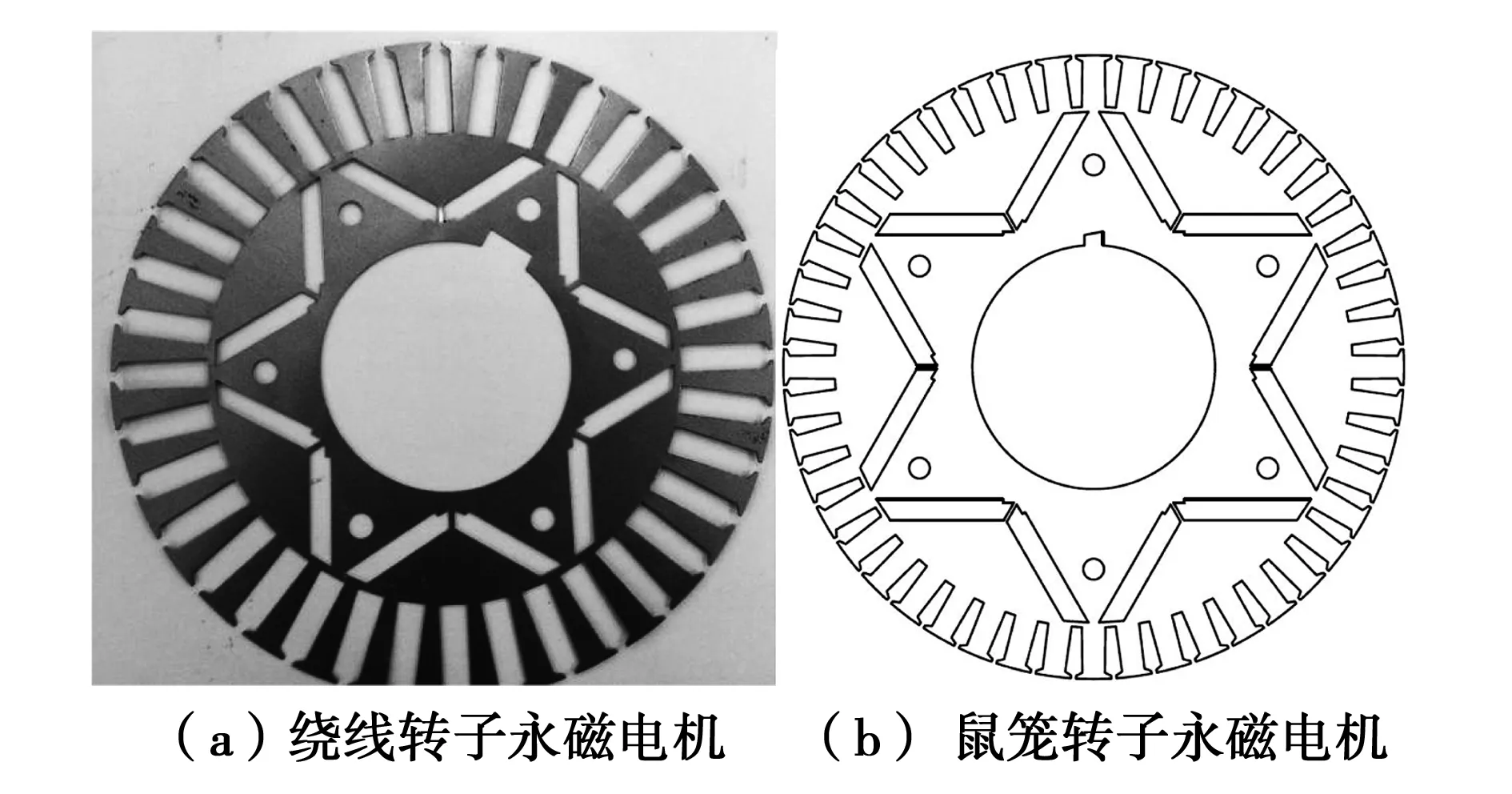
图17 对比电机转子冲片结构Fig.17 Rotor laminations of the compared prototype
实验结果表明,在60 kVA调压器380 V供电条件下,鼠笼转子永磁电机最大起动转矩为45 N~m。图18对比了WRLS-PMSM带额定转矩和鼠笼永磁电机带最大转矩时的起动电流变化规律。通过数据处理与折算,可得鼠笼转子永磁电机的起动电流冲击约为8.5倍额定电流,而采用斩波起动方法的WRLS-PMSM起动电流冲击为6.8倍。图19和图20为两种电机起动过程中转矩和转速变化规律。从图19可知,采用斩波起动方法的WRLS-PMSM即使带满载起动,相比鼠笼转子永磁电机,转矩冲击更小,合成异步转矩更大,而这也直接体现在图20所示的转速变化过程中,WRLS-PMSM更快进入同步转速。表1所示为两种电机在不同控制方式和供电电源条件下的最大起动转矩。

表1 电机最大起动转矩

图18 起动定子电流对比Fig.18 Contrast of stator starting current

图19 起动转矩对比Fig.19 Contrast of starting torque

图20 起动过程转速对比Fig.20 Speed contrast for starting process
4 结 论
本文研究了绕线转子自起动永磁电机斩波调阻起动控制方法。将定转子阻抗参数和电磁关系折算到直流斩波环节,得到两种基于常见缓冲电路的斩波调阻数学模型,并推导出转子外串等效电阻与斩波导通占空比的关系。发现基于RCD型缓冲电路的调阻电路中,当斩波频率较高时,等效电阻计算模型与斩波占空比具有较好的线性关系,参数敏感度低。采用实时最大异步转矩控制方法的绕线转子永磁电机,起动转矩明显提高,起动电流得到抑制。相比鼠笼转子永磁电机,起动和牵入能力显著提高,起动电流抑制效果明显。
[1]赵猛,邹继斌,胡建辉,等. 异步起动永磁同步电动机起动特性研究[J].电工技术学报, 2007,22(7) :145-149.
ZHAO Meng, ZOU Jibin, HU Jianhui, et al. Research on starting characteristic of line-start permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2007, 22(7): 145-149.
[2]ZHOU Ping. Field circuit analysis of permanent magnet synchronous motors[J].IEEE Transactions on Magnetics, 1994, 30(4): 1350-1359.
[3]刘秀君,李伟力,陈文彪.三相异步起动永磁同步电动机起动特性[J].电机与控制学报. 2006, 10(3):269-274.
LIU Xiujun, LI Weili, CHEN Wenbiao. Analysis of starting characteristics of three-phase line-start permanent magnet synchronous motor[J]. Electric Machines and Control, 2006, 10(3): 269-274.
[4]卢伟甫,赵海森,刘明基等.自起动永磁电机复合材料转子导条的优化[J].电机与控制学报. 2013,17(1):1-6.
LU Weifu, ZHAO Haisen, LIU Mingji, et al. Optimization of the composite material rotor bar for a line-start permanent magnet synchronous motor[J]. Electric Machines and Control, 2013, 17(1): 1-6.
[5]KURIHARA K, RAHMAN MA. High-efficiency line-start interior permanent-magnet synchronous motors[J]. IEEE Transactions on Power Apparatus and Systems, 2004, 40(3): 789-796.
[6]DING Tingting, TAKORABET N, FM S. Design and analysis of different line-start PM synchronous motors for oil-pump applications[J]. IEEE Transactions on Magnetics, 2009, 40(3): 1816-1819.
[7]CHEN Xudong, QIAN Jingen, NI Guangzheng. An improved genetic algorithm for global optimization of electromagnetic problems[J]. IEEE Transactions on Magnetics, 2001, (05): 3579-3583.
[8]张健,罗应立,李和明,等. 确定自起动永磁电机最小转矩的时步有限元仿真实验方法[J]. 中国电机工程学报. 2011, 31(21): 102-109.
ZHANG Jian, LUO Yingli, LI Heming, et al.Time-stepping finite element simulation experimental method of determining line-start permanent magnet motor minimal torque[J]. Proceedings of the CSEE, 2011,31(21): 102-109.
[9]李爽. 低速大转矩绕线转子自起动永磁同步电动机的设计与起动性能分析 [D]. 沈阳:沈阳工业大学, 2011.
[10]FENG Gui-hong, LI Chao, ZHANG Bing-yi. Analysis on starting performance of a novel wound rotor Line-start Permanent Magnet Synchronous Motor[C]// 2011 International Conference on Electrical Machines and Systems, 20-23 Aug. 2011,Beijing, China. 2011:1-4.
[11]FENG Gui-hong,LI Qing-xu, ZHANG Bing-yi. Study on starting performance of a novel wound rotor line-start PMSM with WMW[C]//2011 International Conference on Electrical Machines and Systems, 20-23 Aug. 2011, beijing, China. 2011:1-5.
[12]SEN P C. Rotor chopper control for induction motor drive: TRC strategy[J]. IEEE Transactions on Industry Applications, 1975, 11(1): 43-49.
[13]沈天飞,陈伯时,龚幼民. 异步电机转子IGBT斩波调阻调速的准动态模型[J]. 电机与控制学报. 2001, 5 (1): 20-23.
SHEN Tianfei, CHEN Boshi, GONG Youmin. Quasi-dynamic model of the rotor IGBT chopper controlled induction motor[J]. Electric Machines and Control, 2001, 5(1): 20-23.
[14]祁强,张广溢. 异步电动机转子电阻斩波调速系统的特性分析与仿真研究[J]. 电机与控制学报. 2005, 9 (1): 45-47.
QI Qiang, ZHANG Guangyi.Performance analysis and simulation study of the rotor chopper controlled induction motor[J]. Electric Machines and Control, 2005, 977(1): 45-47.
[15]彭清祥. 绕线异步电机转子电流斩波调速系统设计 [D]. 长沙:中南大学,2008.
(编辑:刘素菊)
Chopper starting control of wound-rotor line-start PMSM
FENG Gui-hong,LI Qing-xu,DAI Si-rui,WANG Shuai,ZHANG Bing-yi
(School of Electrical Engineering, Shenyang University of Technology, Shenyang 110870, China)
PWM chopper resistance regulation starting control method was proposed for the wound rotor line-start PMSM (WRLS-PMSM). In order to improve the starting performance, the average starting torque always was kept in maximum by adjusting the equivalent resistance series connected to rotor winding in the process of starting. The relation between the equivalent series resistance and chopper duty ratio was deduced with PWM chopper adjustable resistance quasi dynamic mathematical model establishment by converting impedance and voltage to the dc chopper link; when the synthetic asynchronous torque is the biggest, the relationship between the equivalent series resistance in the rotor side and speed can be deduced. The chopper rules can be acquired,which sets the starting performance experimental platform of WRLS-PMSM. And the starting performance was tested. The comparison with the rotor winding short-circuit starting and traditional squirrel cage rotor LS-PMSM verified the effectiveness of the proposed approach for increasing greatly the starting torque, limiting the starting current as well as improving the pull-in performance.
WRLS-PMSM; starting control; PWM chopper; regulating resistance; max asynchronous torque
2014-03-25
国家重大科学仪器设备开发专项(2012YQ05024207);国家自然科学基金(51077093)
冯桂宏(1963—),女,硕士,教授,研究方向为电机及其控制;
李庆旭(1985—),男,博士研究生,研究方向为永磁电机及其控制;
李庆旭
10.15938/j.emc.2016.08.009
TM 351
A
1007-449X(2016)08-0064-10
戴思锐(1991—),女,硕士研究生,研究方向为永磁电机及其控制;
王帅(1981—),男,博士研究生,研究方向为永磁电机及其控制;
张炳义(1954—),男,博士,教授,博士生导师,研究方向为特种电机及其控制、电子电气机械一体化。
猜你喜欢
郑州航空工业管理学院学报(2024年1期)2024-03-10 09:53:48
设备管理与维修(2022年21期)2022-12-28 07:34:14
上海大中型电机(2021年2期)2021-07-21 03:01:40
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:17:04
防爆电机(2020年6期)2020-12-14 07:16:54
制造技术与机床(2019年11期)2019-12-04 05:50:36
儿童大世界(2019年1期)2019-11-27 23:26:31
儿童大世界·教学研究(2019年9期)2019-05-08 08:26:29
电子制作(2017年20期)2017-04-26 06:57:36