
国产GNSS板卡定位性能测试方法研究
2016-08-26 02:01蔡靖宇陈伏州沈飞李明峰
全球定位系统 2016年3期
蔡靖宇,陈伏州,沈飞,李明峰
(1.南京工业大学 测绘科学与技术学院,南京 211816;2.江苏北斗卫星应用产业研究院有限公司,南京 210032)
国产GNSS板卡定位性能测试方法研究
蔡靖宇1,陈伏州2,沈飞2,李明峰1
(1.南京工业大学 测绘科学与技术学院,南京 211816;2.江苏北斗卫星应用产业研究院有限公司,南京 210032)
本文研究了国产GNSS接收机板卡与计算机间的串口通信技术,探讨了板卡NMEA0183协议解析步骤,提出了基于定位精度、稳定性和冷热启动效率等指标的板卡定位性能判别方法,基于Matlab编程测试了司南K500板卡的定位性能,得出了有益的结论。
GNSS接收机板卡;串口通信;NMEA0183;性能测试
0 引 言
GNSS接收机板卡作为定位产业链中的核心部件,集成了产业链中各种中间产品及技术,在产业链中处于非常重要的地位。由于GPS卫星定位导航起步早、发展比较成熟,Trimble、Leica等国外板卡在高精度领域占有绝对优势,技术垄断且价格昂贵。目前,北斗导航定位及授时业务已覆盖亚太地区。为突破高精度核心板卡技术,我国一大批企业进军集成北斗、GPS和GLONASS三星系统的GNSS高精度板卡研发制造领域,国产GNSS板卡迎来了一个快速发展期。
随着国产GNSS板卡的快速发展,市场上国产GNSS板卡定位精度及稳定性良莠不齐。对于定位终端产品生产商或位置服务应用商而言,确定GNSS板卡性能优劣和选择合适自身需求的板卡都具有极其重要的意义。尽管GNSS板卡品牌各异,但板卡数据格式都遵循NMEA0183标准协议。因此,本文基于目前流行的国产司南板卡,在阐述板卡串口通信及NMEA0183协议的基础上,比较两种串口通信方式的优缺点,解析0183协议并提取有效定位数据,研究GNSS板卡定位性能评判指标和成本低、效率高的评判技术方法。
1 GNSS板卡与计算机串口通信
1.1板卡串口通信
测试GNSS接收机板卡定位性能的前提是通过有效方法获取定位数据,串口通信则是解决接收机板卡与计算机数据交换的常用方法。该方法是通过数据线连接板卡与计算机,按字节进行数据传输,其本质是作为CPU与板卡的编码转换器[1]。每台计算机至少配备一个标准的串行端口RS-232,它是计算机与设备的数据传输通道。在板卡和计算机的数据传输过程中,只要板卡一直处于正常工作的状态,就会不断地将接收并解算出的导航定位信息通过 RS-232 串口传输到计算机中。
1.2串口通信方式与流程
利用计算机实现与板卡间的串口通信方式主要有两种:
1) WindowsAPI函数法:利用Windows提供的全部API动态链接函数进行串口通信,不用对硬件直接进行操作,并通过VC、VB和Delphi等语言进行调用,具体过程包括打开串口、关闭串口、读取、写入等操作;
2) MSComm控件法:利用VB与VC++等.NET平台下提供的串口通信控件MSComm,通过编写程序实现GNSS板卡与计算机间的实时通信[2]。
方法一使用较为复杂的API 函数,需顾及多线程的影响,编写的程序不但庞大,且结构比较复杂,继承性差,维护困难,程序运行效率较低;方法二的MSComm是Microsoft公司提供的简化Windows下串行通行编程的Active X控件,通过串行口传输与接收数据,为应用程序提供串行通信功能,该控件在串口编程时效率较高。
因此,本文采用效率较高的MSComm控件法实现板卡与计算机间的串口通信,MSComm控件串口通信基本流程图如图1所示。
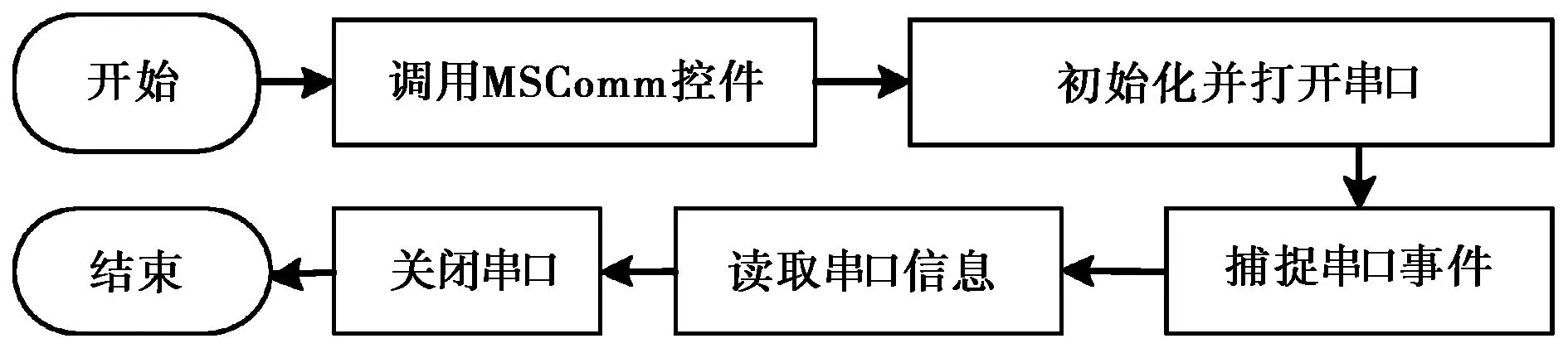
图1 MSComm控件串口通信编程流程图
2 NMEA0183协议解析
2.1NMEA0183协议简介
NMEA0183是由美国国家海洋电子协会制定的一套通信协议[3],现在已经作为一种广泛使用的行业标准。
NMEA0183协议定义了一系列语句,通常采用ASCII码格式。协议语句主要包括:$GPGGA、$GPGSA、$GPRMC、$GPGSV以及$GPGLL等;以$GPGGA为例,格式如下:
$GPGGA<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>*hh
该数据主要由帧头、帧尾、帧内数据组成,每帧数据均以回车符(
2.2NMEA0183协议解析
为测试板卡性能,需正确解析NMEA0183协议的ASCII码格式帧数据,获取有效定位信息。因此,应在明确各语句结构的基础上,通过程序接收缓存字节流中的完整语句[5],从语句中解析出字段信息。
解析帧数据时通过帧头识别帧内数据的结构,如$GPGGA使用“$”判断是否为帧头,依据“$”后的GPGGA、GPRMC确定该行对应定位信息。在分离所需信息时,应根据分隔符“,”提取各字段,以字符串数组的形式返回各字段数据,<1>,<2>,<3>,<4>,…对应各字段。
3 板卡性能指标及分析
衡量GNSS板卡性能的指标有跟踪灵敏度、捕获灵敏度、定位精度、定位稳定性、冷热启动效率等[6]。其中,定位精度是衡量板卡性能最重要的指标,稳定性及冷热启动效率等指标的测试无需借助其他设备且环境要求较宽松,这四项指标基本体现了板卡的性能。因此,本文研究基于定位精度、定位稳定性、冷热启动效率等指标,判断板卡性能的优劣。
3.1定位精度
定位精度是板卡获取的定位信息与其真实位置的接近程度。定位精度包括内符合精度和外符合精度。内符合精度是指板卡多次测量对比较差,外符合精度则是与该点准确坐标较差。测试定位精度需要经纬度和时间信息,该信息可通过NMEA0183下的$GPRMC提取,该帧的结构如下:$GPRMC<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>*hh
<1>为当前格林尼治时间(UTC),格式为mmss;<2>是状态字,A表示定位成功,V表示当前未成功定位;<3>为纬度,格式为ddmm.mmmm;<4>是纬度的属性,南半球为S,北半球为N;<5>为经度,格式为ddmm.mmmm;<6>是经度的属性,东半球为E,西半球为W;<7>为天线移动速度,000.0~999.9节;<8>是相对地面方向,000.0°~359.90°;<9>为当前日期(UTC时间),格式为ddm;<10>为磁偏角,000.0°~180.00°;<11>是磁偏方向,用E or W表示;<*>校验和标志;
通过<2>判断是否有效定位,有效定位后提取<3>、<4>、<9>作为经纬度坐标及对应时间。
GNSS板卡获取的数据是WGS-84坐标系下的经纬度坐标(B,L),一般以平面精度衡量定位精度。因此,需确认当地中央子午线经度,依据高斯3°或6°带投影将定位点投影到平面上,获取两点的平面坐标(x,y),通过matlab中的std函数求解(x,y)定位中误差[7],并结合残差图像分析定位精度。
采用司南K500国产板卡进行测试。K500是司南导航自主研发的三系统单频OEM板卡,采集其伪距差分状态下的测试数据,接收10 min总计600个点的定位数据,测试定位精度及定位稳定性指标。
测试点的准确坐标已知,通过解析NMEA0183协议、使用matlab中std函数求得σx为0.57 m,σy为0.49 m,定位精度残差图如图2所示。板卡设计技术指标中说明水平方向伪距差分精度为1 m,求得的σx、σy均满足1 m要求,且从图像中可观察水平方向残差绝大部分位于1 m以内,定位精度符合设计指标。
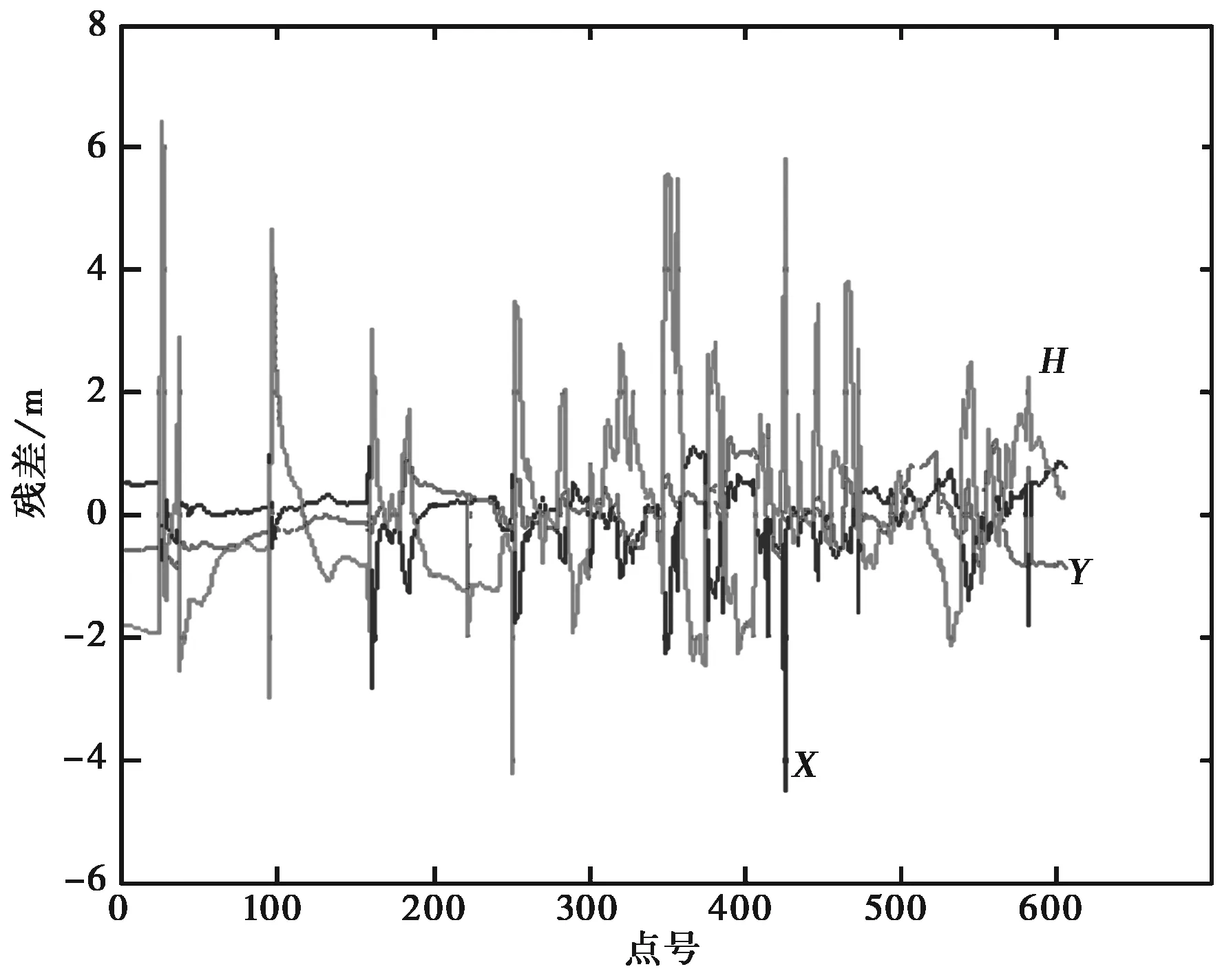
图2 司南K500板卡定位残差
3.2定位稳定性
定位稳定性是指定误差位于指定范围内的概率。提取出定位数据后,可利用matlab中的capaplot概率密度函数确定板卡定位误差位于米级、亚米级和毫米级之间的概率。
为更加直观地判断K500板卡是否适用于亚米级精度的应用,使用capaplot函数求出上述定位误差在1 m内的概率,图3分别示出了x、y方向亚米精度概率分布图,求得x、y方向误差1 m内的概率Px为0.92,Py为0.95,可知Px与Py均大于90%,板卡定位稳定性较高,满足亚米级定位要求,可应用于车道级导航等高精度应用上。
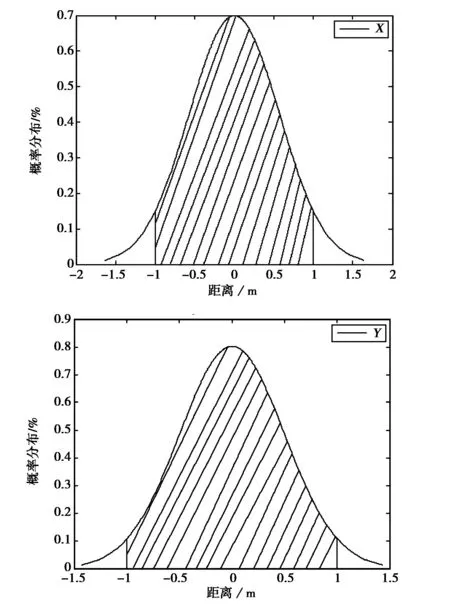
图3 x和y方向亚米级精度概率分布
3.3冷启动效率
冷启动效率是指板卡在星历、历书、时间和位置未知,即在没有任何数据保存的情况下,直接加电测试到能够获取有效定位数据的首次定位时间。冷启动过程较慢,这是衡量板卡定位能力的重要指标之一。本文从协议字段判断和图像分析的角度,提出了以下两种方式分析板卡冷启动效率:
1) 字段判别法:利用$GPRMC中的<2>判断当前状态是否为有效定位。板卡刚启动时处于无效定位,即<2>=V.从启动开始计时,当<2>=A时计算所需时间,该时间即为冷启动时间。
2) 图像法:利用matlab画出经度或纬度随时间波动图像。冷启动时无法有效定位,经纬度波动幅度较大。待有效定位时,经纬度波动幅度变小且趋于稳定,通过图像直观判断冷启动时间。
接收约3 min共200个点的K500板卡冷启动测试数据,测试板卡冷启动性能指标。
冷启动状态下,结合字段判别法可通过matlab批量解析$GPRMC中<2>字段求得首次定位时间为44 s,如表1所示。表中063432、063516均为UTC时间,063432含义为6时34分32秒,063516含义为6时35分16秒。
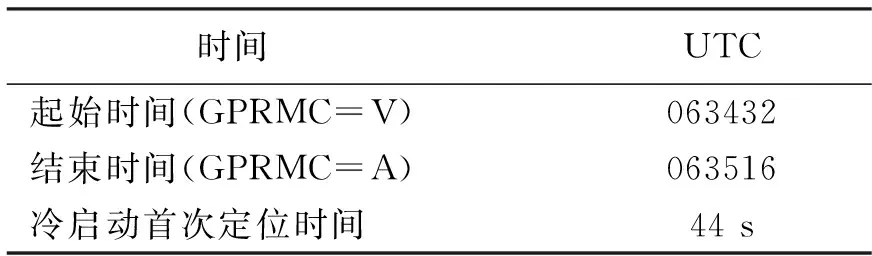
表1 冷启动定位时间
依据图像法可通过纬度随时间波动图像如图4所示判断冷启动效率,易发现40 s前纬度波动幅度较大,40 s后波动幅度较小即获得有效定位。
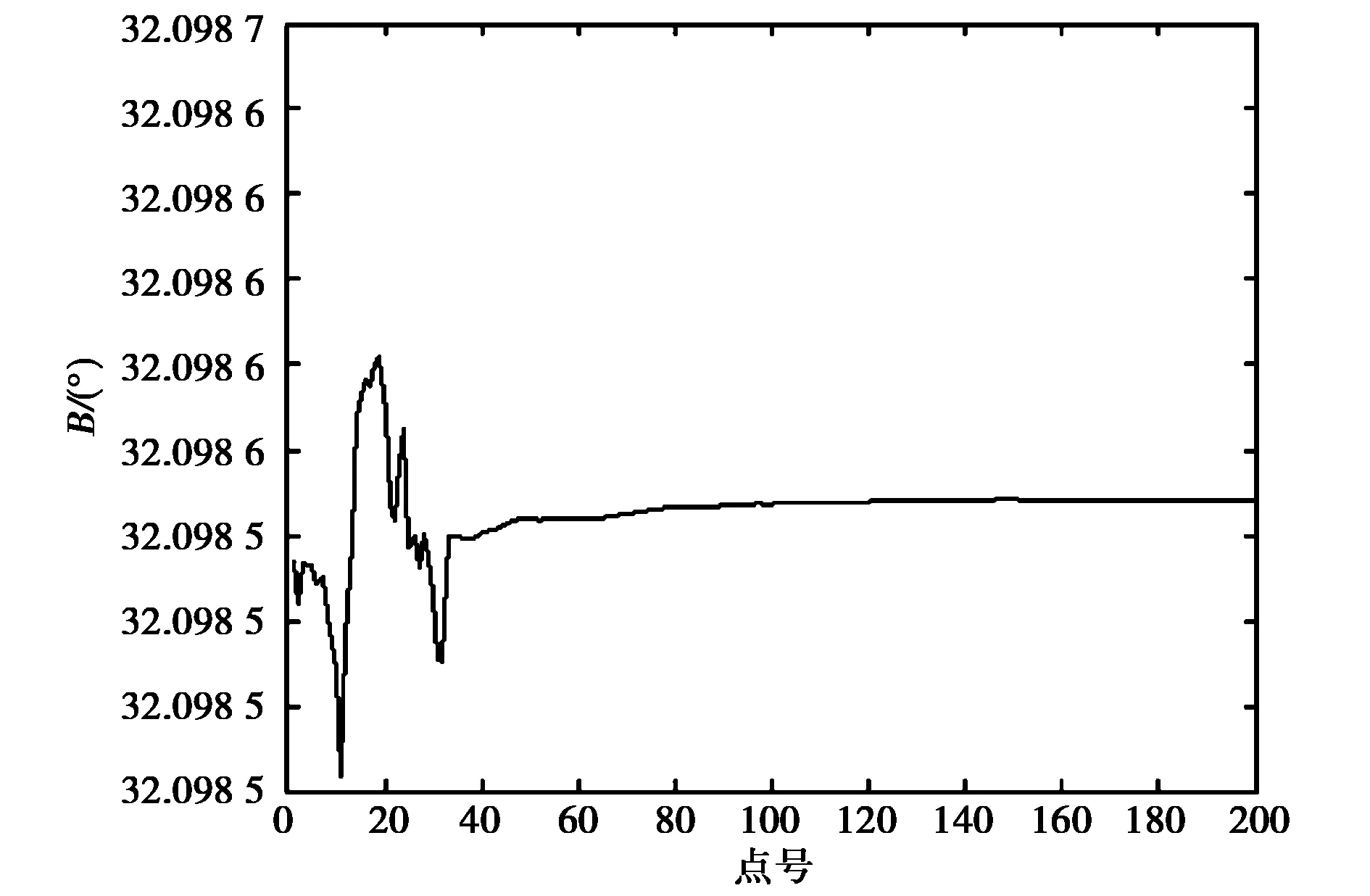
图4定位纬度值随时间波动
板卡设计技术指标中说明冷启动时间<60 s,上述两种方法实测的冷启动时间均满足要求。
大量试验证明,字段判别法在绝大部分情况下比较准确,能得出精确的冷启动时间,但若遇信号问题,GPRMC中<2>字段值不准确,可能出现所需启动时间的误判;图像法只能大致判断冷启动所需时间,但不能精确至秒,但其表示的纬度变化形象直观,板卡正常定位后也对应着纬度数据振幅范围逐渐变小,故出现误判的可能性较小。
3.4热启动效率
热启动是在长期开机的情况下复位产品,热启动效率即复位后重新定位的时间。热启动所需时间相对冷启动要短很多,上述冷启动效率中提出的图像法不再适用于热启动,借助经纬度随时间波动图像无法准确分析热效率效率,利用$GPRMC中的<2>字段是判断热启动效率的最佳方法。
接收约3 min共200个点的K500板卡热启动测试数据,测试板卡热启动性能指标。
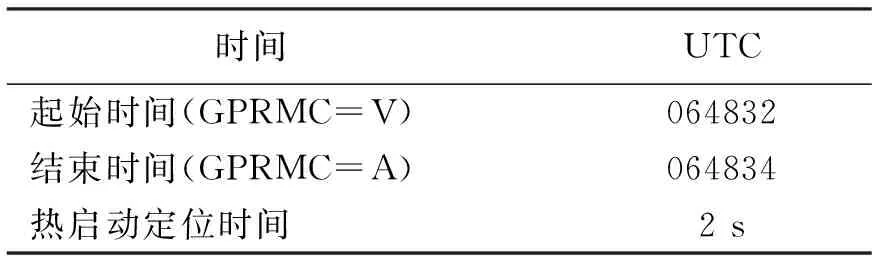
表2 热启动定位时间
使用matlab批量解析测试数据中$GPRMC中<2>字段求得首次定位时间为2 s,如表2所示。板卡设计技术指标中热启动时间<5 s,可知实测的热启动时间满足要求。
4 结束语
本文在解析串口和分析NMEA0183协议的基础上,基于定位精度、定位稳定性和冷热启动效率等四个性能指标,提出了成本低、效率高的GNSS板卡性能评判技术方法,结合对司南K500板卡的性能测试,论述了板卡测试步骤,论证了该方法的便捷性和有效性。
[1]张超,范娟利,章传银,等. 不同格式ASCII数据流解析方法研究[J]. 全球定位系统,2014,39(1):56-60.
[2]袁德宝,崔希民,臧永强,等. 基于VC++的GPS-OEM板串行通信关键算法的设计与实现[J]. 测绘科学,2008(6):170-172.
[3]张智刚,罗锡文,胡炼,等. 4种DGPS模块动态定位精度测试与分析[J]. 华南农业大学学报,2010(1):102-107.
[4]陈桂珍. 利用MATLAB实现GPS OEM板与计算机的通讯及信息处理[J]. 盐城工学院学报(自然科学版),2006(1):32-35.
[5]孙鹏,高金耀,张涛. 利用MATLAB实时处理GPS数据[J]. 东海海洋,2004(1):20-27.
[6]张国庆,张显库. 实船数据处理建模及仿真系统[J]. 中国造船,2011(3):52-58.
[7]郝强. 卫星导航仿真测试系统的数据仿真与处理[D].太原:中北大学,2015.
Testing of the Positioning Performance of Domestic GNSS Board
CAI Jingyu1,CHEN Fuzhou2,SHEN Fei2,LI Mingfeng1
(1.CollgeofGeomaticsScienceandTechnology,NanjingTechnologyUniversity,Nanjing211816,China;2.JiangSuBDSApplicationIndustryInstitute,Nanjing210032,China)
The serial port communication between the domestic GNSS board and the computer is studied and NMEA-0183 protocol for GNSS board is analyzed in this paper.With the positioning performance indexes of GNSS board introduced, the accuracyof positioning, the stability of positioning, the hot efficiency and the cold starting efficiency are selected to test the positioning performance of GNSS board and the testing methods are suggested.Through experiments based on the Sinan K500 board, some useful conclusionsare made.
GNSS board; serial portcommunication; NMEA0183; function testing
2015-02-20
南京市科技发展计划项目(编号:2014sc331065)
P228.4
A
1008-9268(2016)03-0039-05
蔡靖宇(1992-),男,硕士生,主要从事卫星导航定位及其应用方面研究。
陈伏州(1963-),男,研究员,主要从事通信技术及导航定位研究。
沈飞(1980-),男,博士,高级工程师,主要从事北斗卫星导航技术应用。
李明峰(1964-),男,教授,博导,主要从事精密工程测量和变形监测研究。
doi:10.13442/j.gnss.1008-9268.2016.03.009
联系人: 蔡靖宇 E-mail: caijingyu2015@163.com
猜你喜欢
重庆大学学报(2022年6期)2022-06-23
汽车实用技术(2021年17期)2021-09-23
客联(2021年2期)2021-09-10
中文信息(2020年10期)2020-11-30
铁道通信信号(2020年8期)2020-02-06
软件(2018年7期)2018-08-13
电子制作(2017年23期)2017-02-02
火控雷达技术(2016年3期)2016-02-06
中国新技术新产品(2011年3期)2011-01-23
